(54) ВЕСОВОЙ ПОРЦИОННЫЙ ДОЗАТОР

| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматический весовой порционный дозатор | 1974 |
|
SU570785A1 |
| Автоматический весовой порционный дозатор | 1984 |
|
SU1186956A1 |
| Весовой порционный дозатор | 1980 |
|
SU879316A1 |
| Способ весового автоматического дозирования сыпучих материалов и устройство для его осуществления | 1988 |
|
SU1527511A1 |
| Весовой порционный дозатор | 1975 |
|
SU515947A1 |
| Весовой порционный дозатор | 1979 |
|
SU845016A1 |
| Весовой порционный дозатор | 1977 |
|
SU648847A1 |
| Пневматический весовой дозатор непрерывного действия | 1977 |
|
SU684318A1 |
| Устройство для многокомпонентного дозирования компонентов синтетических моющих средств | 1990 |
|
SU1805454A1 |
| Устройство управления весовым порционным дозированием сыпучих материалов | 1982 |
|
SU1064152A1 |
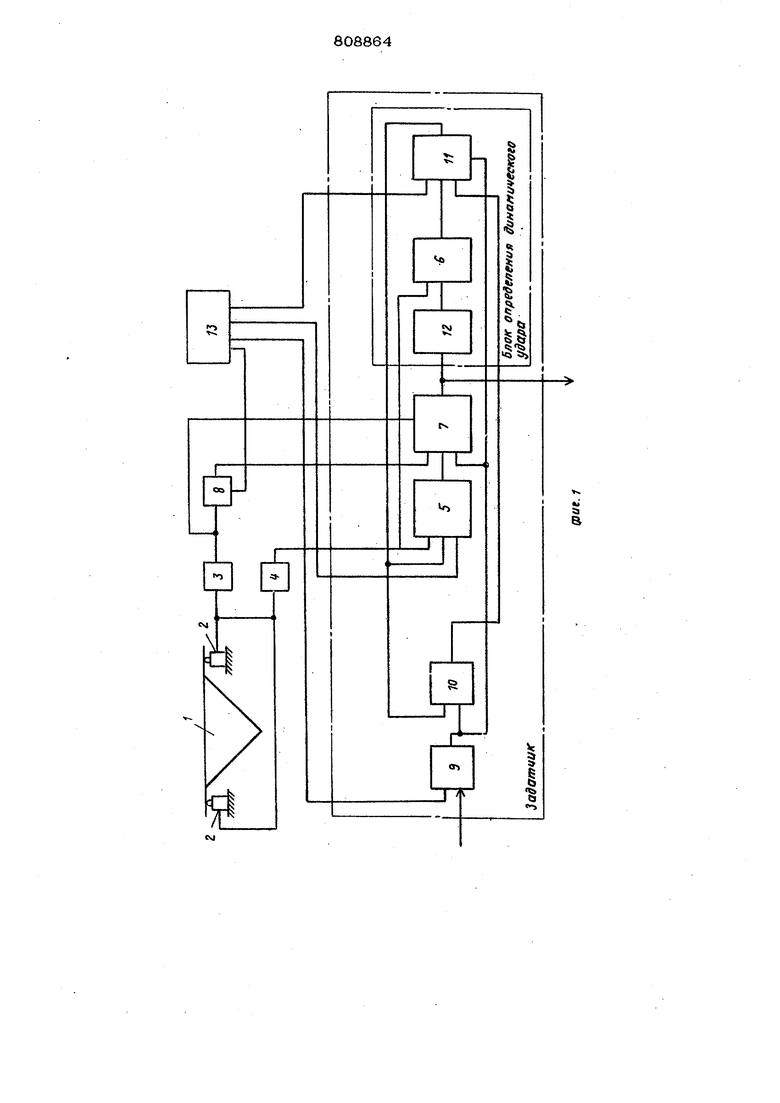

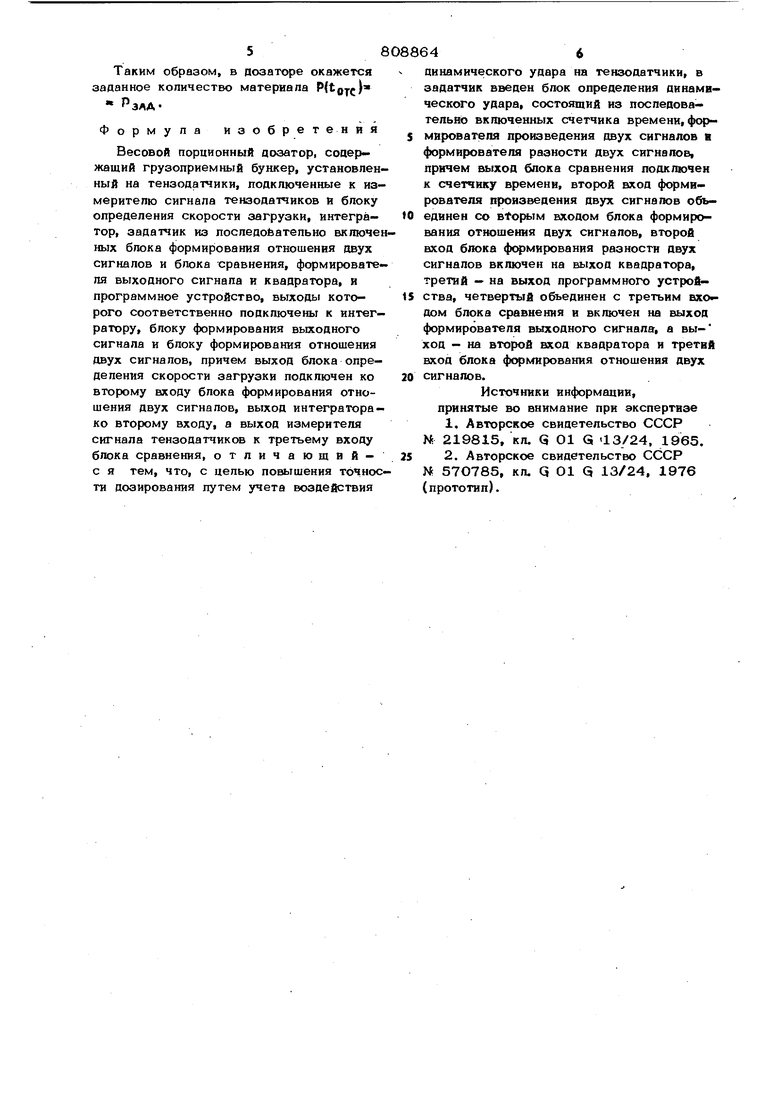
Изобретение относится к весоизмерительной технике. Известны весовые порционные дозаторы, содержащие грузоприемный бункер, опирающийся на тензодатчики, подюаочен- ные к блоку управления, снабженному уз- лом коррекции запаздывания затвора 11 . В этих дозаторах учитывается скорость п ступления материала в грузоприемный бункер и время срабатывания затвора. Однако в известных дозаторах не устранены случайные погрешности, вызванные шумами датчиков, измерительной аппаратуры и наличием случайных изменений динамического удара потока падающего материала о грузоприемный бункер. Наиболее близким по технической сущности к предлагаемому является весовой порционный дозатор, содержащий грузопри- емный бункер, установпеннь1й на тензодатчики, подключенные к измерителю сигнала тензодатчиков и блоку определения скорости загрузки, интегратор, задатчик из последовательно включенных блока формирования отношения двух сигналов и блока сравнения, формирователя выходного сигнала и квадратора, и программное устройств во, выходы которого соответственно подключены к интегратору, блоку формирования выходного сигнала и блоку формирования .отношения двух сигналов, причем выход блока определения скорости загрузки подключен ко второму входу блока формирования отношения двух сигналов, выход интегратора - ко второму, а выход измерителя сигнала тензодатчиков к третьему входу блока.сравнения 2. Недостатком устройства является наличие ошибки, определяемой влиянием ди- нами еского удара, неточность определения момента подачи команды, не прекращение дозирования. Цель изобретения - повышение точное- . ти дозирования путем учета воздействия динамического удара на тензодатчики. Для достижения поставленной цели в задагчик введен блок определения динамического удара, состоящий из последова- 38 тельно включенных счетчика времени, фор- мироватепя произведения двух сигналов и формироватепя разности двух сигнапов, причем выход блока сравнения подключен к счетчику времени, второй аход формиро вателя произведения двух сигналов обьединей со вторым входом блока формирования отношения Двух сигналов, второй вход блока формирования разности двух смгнадов включен на выход квадратора, третий на выход программного устройства, четвертый объединен с. третьим входом блока сравнения и включен на выхоа форми рователя выходного сигнала, а выход - на второй вход квадратора и третийвход блока формирователя отношения двух сигналов. На фиг, 1 изображена структурная схема описываемого дозатора; на фиг. 2 изменение динамического удара и выходного сигнала тензодатчиков во времени. Грузоприемный бункер 1 установлен на тензодатчики 2, выходы которых сое динены со входами измерителя сигнала тензодатчиков 3 и блока 4 определения скорости загрузки, выход которого соединен со входами формирователя 5 отношения двух сигналов и формироватепя 6 произведения двух С1ггналов, выход блока 3 соединен с одним из входов узла 7 сравнения и через интегратор 8 с другим входом узла 7$ выход формирователя 9 выходного сигнала задатчика соединен с одним из входов квадратора 10 узла 7, формирователя 11 разности двух сигналов выход которого соединен с одними из вхо дов блоков 1О и 5, к остальным входам формирователя 11 подключены выходы блоков 1О и 6, выход формирователя 5 через узел 7 соединен со входом счетчика 12 времени, выход которого соединен с одним из входов формирователя 6, выходы программного устройства 13 соединены с одними из входов блоков 8, 9, 5 и 11. Дозатор работает следующим образом Перед началом дозирования в сравни- вакаций узел 7 формирователем 9 ного сигнала задатчика заносится число Р, составляющее малую часть РзлдП от крывается затвор расходного бункера, т.е начинается дозирование. Счетчик 12 вре мени определяет время нарастания IT си нала теьЕзодатчиков до величины, пропорциональной Р {фиг. 2, где 1 - идеальны процесс дозирования, 2 - процесс изменения динамического удара во времени, 3 - суммарньЕЙ процесс, т.е. сигнал на входе дозатора, здесь принята для упро4ения линейная аппроксимация процессов), подает сигнал, пропорциональный времени Т на один из входов формирователя 6, на другой вход которого поступает информация об измеренной величине скорости агрузки Q от блока 4. Выходной сигнал формирователя 6, пропорциональный Q f вычитается в формирователе 11 из сигнала блока 9, пропорционального величине Р Выходной сигнал формирователя 11, пропорциональный величине динамического удара в начальный момент поступает на один из входов квадратора 1О, на другой вход которого затем поступает сигнал с формирователя 9, пропорциональный величине заданной цозы Р, С выхода квадратора сигналы, пропорцио- АД (to;f на льны е Р поступают на формирователь 11, на выходе которо- го получается их разность, которая затем обрабатывается формирователем 5: S )-РЗДА. 2Q Сигнал с выхода формирователя 5, пропорциональный .5 поступает на один из входов узла 7 сравнения, на другой вход последнего поступает сигнал с интегратора 8: 5i At I P При равенстве 5 и 5 узел 7 сравнения выдает команду на прекращение дозирования (в момент времени отс Приравнивая S. и имея в виду, что Q Q -QJГдe Q-, - реальная величина расхода, скорость изменения динамического удара. )--p(to.t) получим: P{toTC)P3AA-P toTc), Т.е. в момент Ьотсв грузоприемном бункере дозатора окажется материал на P ftprc) меньше заданного (здесь Р (toTC) величи ш динамического удара материала о Грузоприемный бункер). После подачи команды на закрытие затвора расходного бункера в Грузоприемный бункер дозатора посыпется материал, образующий как бы взвешенный столб, его количество при начальной скорости истечения материала из затвора расходного бункера, равной нулю, соответствует величине P3{to).
Таким образом, в дозаторе окажется заданное количество материала Pitgy)
« РЗЛАФормула изобре
тения
Весовой порционный аозатор, соаер- жащий грузоприемный бункер, установленный на тензодатчики, подключенные к измерителю сигнала тензодатчиков и блоку определения скорости загрузки, интегратор, задатчик из последоЬательно вкточенных блока формирования отношения двух сигналов и блока сравнения, формирователя выходного сигнала и квадратора, и программное устройство, выходы которого соответственно подключены к интегратору, блоку формирования выходного сигнала и блоку формирования отношения двух сигналов, причем выход блока определения скорости загрузки подключен ко второму входу блока формирования отношения двух сигналов, выход интеграторако второму входу, а выход измерителя сигнала тензодатчиков к третьему входу блока сравнения, отличающийс я тем, что, с целью повышения точности дозирования путем учета воздействия
динамического удара на тензодатчики, в задатчик введен блок определения динамического удара, состоящий из последовательно включенных счетчика времени, формироватепя произведения двух сигналов в формирователя разности двух сигналов, причем выход блока сравнения подключен к счетчику времени, второй вход формирователя произведения двух сигналов обь-
единен со BtopbiM входом блока формирования отношения двух сигналов, второй вход блока ф(мирования разности двух сигналов включен на выход квадратора, третий - на выход программного устройства, четвертый объединен с третьим вхо- дом блока сравнения и включен на выход формирователя выходного сигнала, а вы- ход - на второй вход квадратора и третий вход блока ф(мирования отношения двух
сигналов.
Источники информации, принятые во внимание при экспертизе
1, Авторское свидетельство СССР Н 219815, кл. Q 01 G 13/24, 1965.
м зад. зод
(put. 2 Pltome)
