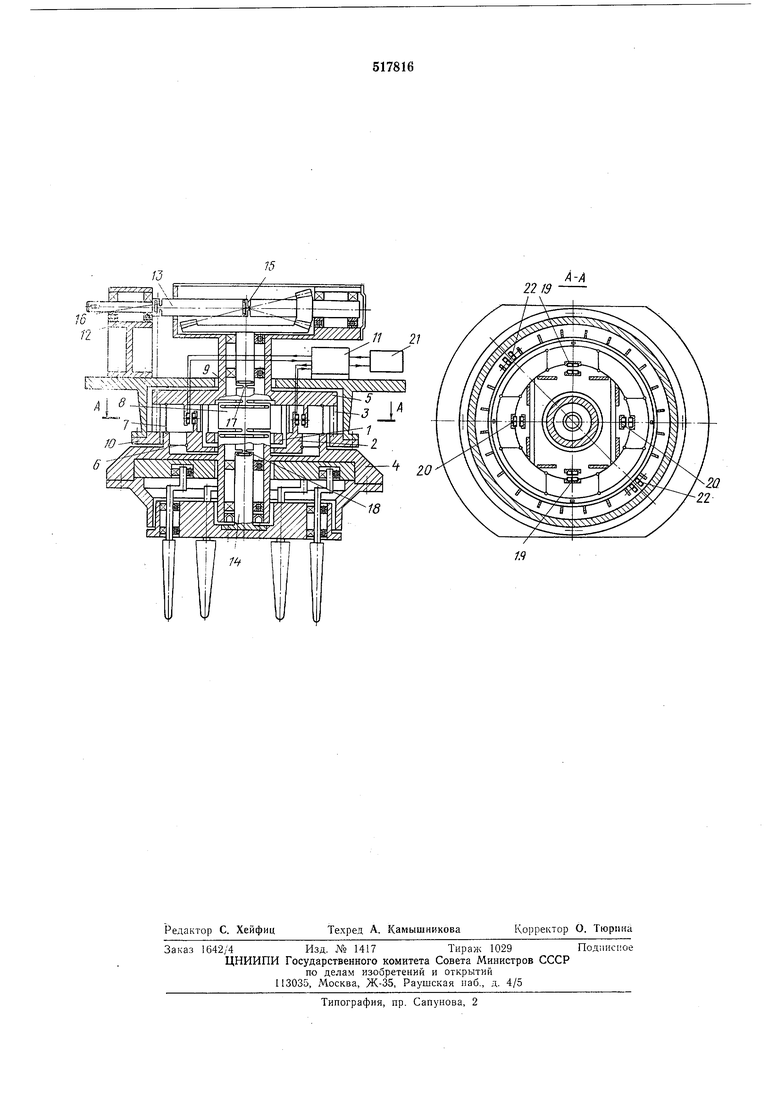
частями упругих элементов, и цилиндр 8, связывающий платформу с диском. На диске жестко закреплен корпус конического редуктора 9. Упругая система опирается на основа,ние 10, на котором смонтированы электрические схемы 11 измерительных преобразователей и опора 12 приводного горизонтального вала 13. Горизонтальный и вертикальный валы 14 снабжены упругими шарнирами 15, 16, 17, 18, обеспечивающими свободу перемещений подвижным частям упругих элементов при действии измеряемых сил. При этом у горизонтального вала центр шарнира 15 совмещен с осью вращения вертикального вала, а центр шарнира 16 - с осью симметрии упругого звена (балочек) торсионного элемента.
Упор, создаваемый лопастями движителя, передается на платформу 4 и далее через кинематические звенья на подвижные рамки упругих элементов 1 и 2. Последние смещаются относительно диска 5 в направлениях действия составляющих упора на величины, пропорциональные этим составляющим. Смещения преобразуются в частоты электрических сигналов дифференциальными индуктивными преобразовательными элементами 19, 20 с магнитными системами на броневых ферритовых сердечниках, измеряемые многоканальным цифровым частотомером 21.
Гидродинамический крутящий момент, создаваемый лопастями движителя передается через вал 14 и конический редуктор 9 на диск 5. Диск поворачивается вокруг вертикальной оси относительно основания 10 на угол, пропорциональный величине деформации балочек торсионного упругого элемента 3. Угол поворота преобразуется в частоту электрического сигнала преобразовательным элементом 22, измеряемую частотомером.
Исполнение упругих измерительных преобразователей в виде единой системы, симметричной относительно оси вращения ротора, и размещение преобразователей между редуктором и ротором движителя позволяют практически исключить взаимные влияния составляющих полной гидродинамической силы, получить высокие динамические свойства системы «движитель -- измерительный преобразователь и выполнить устройство в габаритах модели движителя, решив этим задачу его размещения в модели судна. Объединение поворотной части торсиона с основаниями упругих элементов, а также жесткая связь поворотной части торсиона непосредственно с корпусом редуктора и при помощи цилиндра, снабженного шарнирами, с силопередающей платформой обеспечивает автоматическое исключение погрешности от момента, создаваемого на валу ротора силами трения в механизме поворота лопастей, в подшипниках, в манжетных уплотнениях, а также силами жидкостного трения в зазорах между ротором и корпусом движителя.
Снабжение валов шарнирами и совмещение центров шарниров, включенных в горизонтальный вал, одного - с осью вращения ротора, а другого - с осью симметрии балки торсиона исключает кинематические погрешности при повороте подвижной части торсиона от действия измеряемого момента.
Одновременное измерение составляющих упора обеспечивает возможность исследования движителя при дискретно изменяемых направлениях действия упора путем смещения центра управления лопастями и выявления оптимального положения указанного центра.
Формула изобретения
Устройство для измерения усилий и крутящего момента крыльчаты;. движителей, содержащее корпус, подвижную силопередающую горизонтальную платформу с прикрепленным к ней испытываемым двк/кителем, упругие параллелограммные элементы, воспринимающие составляющие силы упора, торсион, воспринимающий крутящий момент, преобразователи деформаций упругих элементов и.торсиона и электрический сигнал, конический редуктор, выходной вертикальный вал которого соединен с ротором движителя, а горизонтальный входной вал - с приводным двигателем, отличающееся тем, что, с целью повышения точности и обеспечения возможности .измерения в кавитационных трубах и в моделях судов при дискретно изменяемых направлениях действия упора, оно снабжено поворотным основанием в виде концентричного вертикальному валу- редуктора диска, жестко связанного с корпусом редуктора и соединепного с платформой через охватывающие вертикальный вал цилиндр, снабженный упругими шарнирами, и вертикальные равномерно расположенные по окружности шарнирные тяги, а также через скрепленные с двумя взаимно перпендикулярными параллелограммными элементами, охватывающими цилиндр, горизонтальные шарнирные тяги, и соединенного с корпусом через торсион, выполненный в виде равномерно расположенных по окружности, охватывающих шарнирные тяги вертикальных балок, при этом каждый вал редуктора снабжеп двумя шарнирами, центр одного из которых в горизонтальном вале совмещен с осью вращения вертикального вала, а центр другого расположен на линии пересечения окружности установки балок торсиона с проекцией оси горизонтального вала на указанную окружность.