1
По основному авт. св. № 452906 известно устройство для управления п-ступенчатым дифференциальным шаговым дв-игателем, у которого цена шага каждой последующей ступе«и в целое число раз больше ц&ны шага предыдущей ступени, содержаш.ее подключенный к каждой ступени двигателя коммутатор, состоящий из распределителя импульсов, связанного через ключ с блочком индивидуальной памяти, причем ;выход блока индивидуальной па.мяти предыдущей ступени соединен со входОМ указанио о блока последующей ступени.
Предлагае.мое устройст1во позволяет повысить точность отработки перемещения. Для этого оно дополнителыно содержит формирователь серии имнульсов и анализатор объема примятой информации, входы которого соединены с блокаМИ индивидуальной памяти предыдущей и лосладующей ступеней, а выход - со входом формирователя, подключенного овоИМИ выходами «о входа последующей ступени.
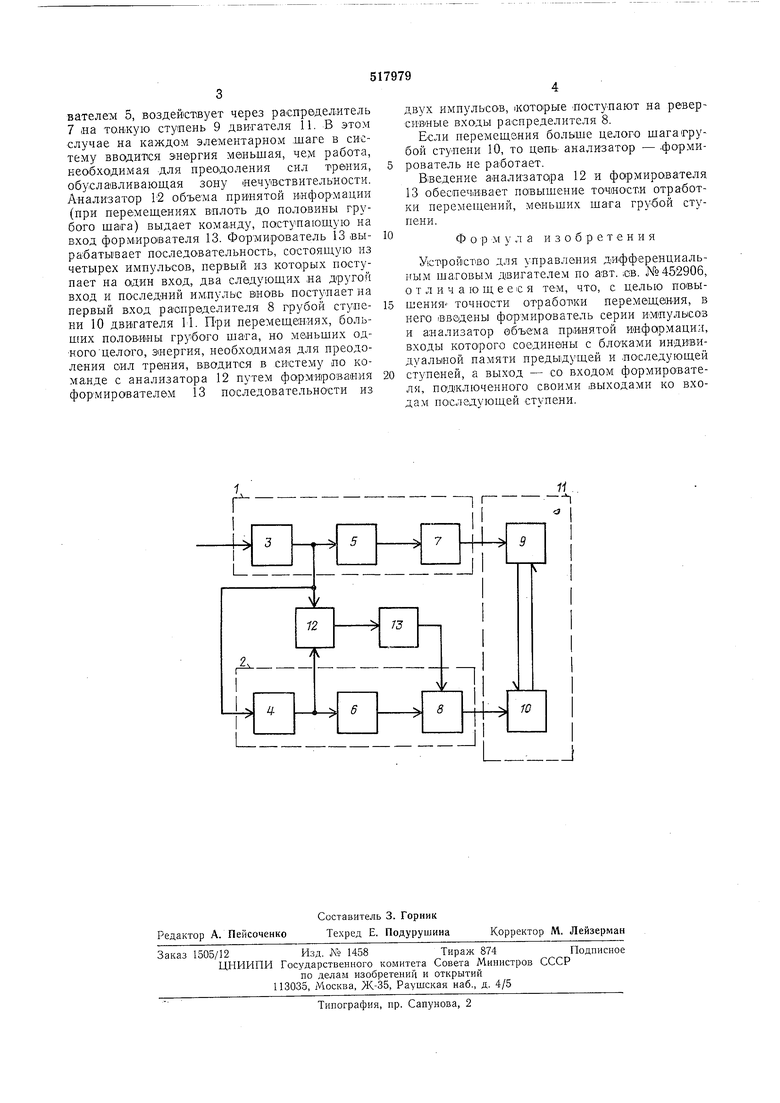
На чертеже даеа ст1руктурная схе.ма описываемого устройства.
Уст ройст:во содержит два коммутатора 1 и 2 (по числу ступеней двигателя), каждый из которых включает в себя блоки 3 и 4 ийдивидуалыной памяти, преобразователи 5 и 6 и распре|делители 7 и 8 Импульсов. Выходы распределителей каждого коммутатора соединены с
соответствующими ступенями 9 и 10 диффереициалыного шагового двигателя 11, причем выход блока 3 па-мяти тонкой ступени 9 соединен со входом блока 4 па1мяти грубой ступени 10. Одновремепйо выходы блоков 3 и 4 индивидуальной памяти связаны со входами анализатора 12 объема принятой информации, выход которого через формирователь 13 серии и.мпульсов соединен с реверсивными входами распределителя 8 грубой ступени.
Устройство работает следующим образом.
При перемещеннях, составляющих один или несколько грубых шагов, входная инфорМацпя, принятая блоком 3 индивидуальной па.яти коммутатора 1 тонкой ступени 9, переписывается в блок 4 индивидуальной памяти коммутатора 2 грубой ступе1нн 10 и преобразованная в унитарный код преобразователем 6 через распределитель 8 воздействует на грубую ступень 10 дв-игателя 11. Если перемещение больше одного грубого шага и дробное, то работают обе ступени 9 и 10 двигателя 11, причем целая составляющая информация на перемещение отрабатывается грубой ступенью 10, а дробная часть - тонкой ступенью 9 двигателя 11.
Если перемещения составляют несколько малых шагов, вплоть до-грубого шага, то информация в блоке 3 И нди1вндуальной памяти, преобразованная в унитарный ..код преобразователем 5, воздействует через распределитель 7 1на то.икую ступень 9 двигателя 11. В этом случае на каждом элементарном шаге в систему ВВОДИТ1СЯ энергия меньшая, чем работа, необходимая для преодоления сил трения, обуславливающая зону «ечувствительности. Анализатор 12 объема принятой ииформации (при перемещениях вплоть до половины грубого шага) выдает команду, поступающую на вход формирователя 13. Формирователь 13 вырабатывает последовательность, состоящую из четырех импульсов, первый из которых поступает на один вход, два следующих на другой вход и последний им.пульс виовь поступает на первый вход распределителя 8 грубой ступени 10 двигателя 11. При перемещеииях, больших половины грубого шага, но меньших одногоцелого, энергия, необходимая для преодоления сил трения, вводится в систему по команде с анализатора 12 путем фарм-ироваиия формирователем 13 последовательности из
двух импульсОВ, iKOTOpbie -поступают на реверсивные входы распределителя 8.
Если перемещения больше целого шага грубой ступени 10, то цепь анализатор - .формирователь не работает.
Введение анализатора 12 и формир01вателя 13 обеспечивает повышение точности отработки перемеп ений, меньших шага грубой ступени.
Формула изобретения
VicTpo cTBO для управления дифференциальным шаговым двигателем по авт. св. KQ 452906, отличающееся тем, что, с целью повышения точности отработ1ки перемещения, в него введены формирователь серии импульсов и анализатор объема принятой информации, входы которого соединены с блоками индивидуальной памяти предыдущей и последующей ступеней, а выход - со входом формирователя, подключенного своими выходами ко входам последующей ступени.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления п-ступенчатым дифференциальным шаговым двигателем | 1973 |
|
SU452906A1 |
| Система числового программногоупРАВлЕНия "TPACCA-Кп | 1979 |
|
SU813371A1 |
| Устройство для управления шаговым двигателем | 1977 |
|
SU663058A1 |
| ДАТЧИК ОБРАТНОЙ СВЯЗИ ДЛЯ УСТРОЙСТВ УПРАВЛЕНИЯ С ШАГОВЫМИ ДВИГАТЕЛЯМИ | 1973 |
|
SU408279A1 |
| Устройство для управления шаговым двигателем с дроблением шага | 1981 |
|
SU964951A1 |
| Устройство для старт-стопного управления шаговым двигателем | 1981 |
|
SU964950A1 |
| Позиционный дискретный электропривод | 1985 |
|
SU1352474A1 |
| Устройство для программного управления процессом обработки изделий микроэлектроники | 1986 |
|
SU1386962A1 |
| Многокоординатный регулятор линейнойСКОРОСТи | 1978 |
|
SU798728A1 |
| Устройство управления охлаждением горячекатаной полосы | 1981 |
|
SU952397A1 |
L.
.J
