(54) ИНЕРЦИОННАЯ МУФТА

| название | год | авторы | номер документа |
|---|---|---|---|
| Инерционная муфта | 1976 |
|
SU916804A2 |
| Инерционная муфта | 1974 |
|
SU572612A1 |
| Муфта предельного момента С.Г.Нагорняка | 1981 |
|
SU979747A1 |
| Инерционная бесступенчатая передача | 1978 |
|
SU821824A1 |
| Инерционный трансформатор вращающего момента | 1990 |
|
SU1820105A1 |
| Зубоотделочный станок с инерционной связью | 1987 |
|
SU1563870A1 |
| БЕЗИНЕРЦИОННЫЙ ТРАНСФОРМАТОР ВРАЩАЮЩЕГО МОМЕНТА ШАШКИНА | 1992 |
|
RU2073805C1 |
| ИНЕРЦИОННАЯ МУФТА | 1992 |
|
RU2047017C1 |
| Привод перемещения рабочей клети стана холодной прокатки труб | 1980 |
|
SU956081A1 |
| ТРАНСФОРМАТОР ВРАЩАЮЩЕГО МОМЕНТА ШАШКИНА | 1992 |
|
RU2073804C1 |

Изобретение относится к машивостроению в может бьлть .вспольэовано для соединения I валов с бесступенчатым нзменением скороо|Тн ведомого вала в зависимостн от нагруэi кн.
; Известна инерционная муфта, содержашш водило, несущее сцепленные с центральным колесом сателлиты, а также инерционные грузы, размещенные в элементах, взаимо: действуюшЕХ с ними, соединенных с сате); литамн и вьшолненных в виде напреюяяюощх Для разгрузки опор сателлитов от дейст ВИЯ ннердиошшх сил для увеличения срока их службы предлагаемая муфта снабжена
опорами, с. помощью которых в водиле установлены, элементы, взйимодействующие с инерцнонньши грузами, вьшолненные в виде обойм, свободйо вращающихся относительно сателлитов, и расположенных внутри них
секторов с осями, связанными с сателлита- , ми, причем радиус кривизны боковых поверх- : ностей секторов превышает радиус инерционного груза и имеет общую касательную плоо кость с внутренней поверхностью обоймы.
Такое выполнение обеспечивает поочередный контакт инерционного груза с сектором и обоймой, в результате чего их опоры ра ботают под нагрузкой лишь часть цикла, при этом опоры сателлитов нагружаются 1 только усилиями от зацепления шестерен,
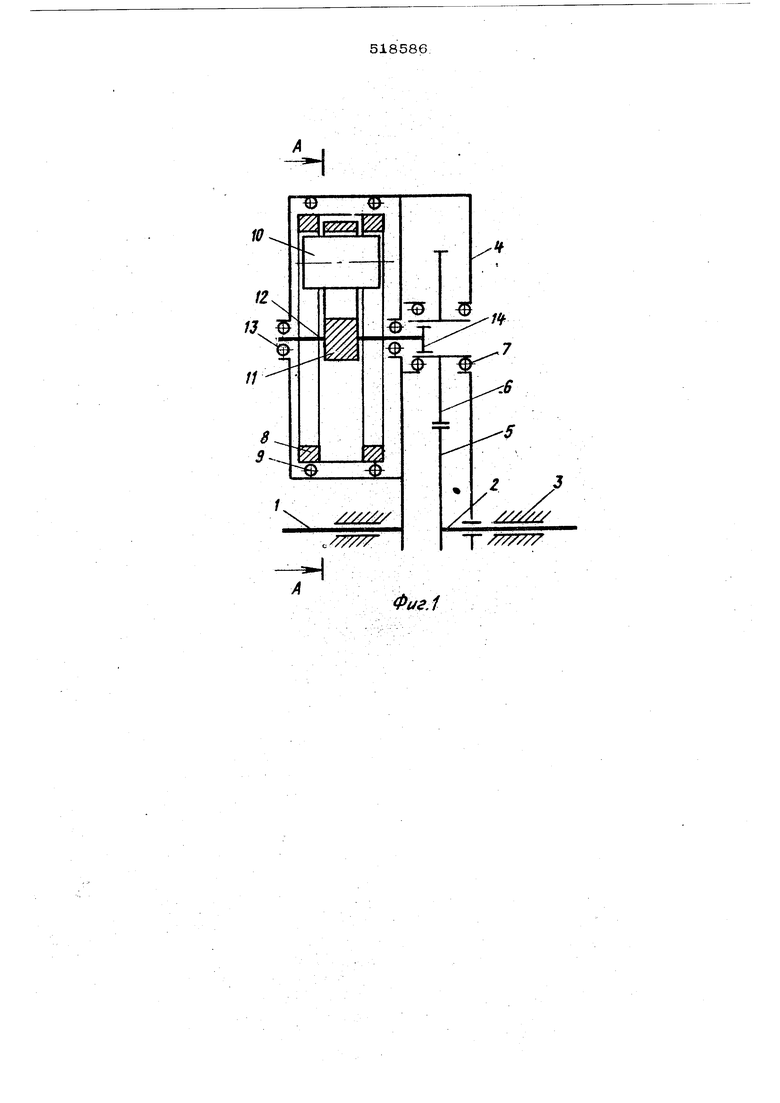
На фиг, 1 дана кинематическая схема предлагаемой инерционной муфты, продольгный разрез; на фиг. 2 изображен разрез по А-А на фаг. 1.
Инерционная муфта содержит ведущий и ведомый валы 1 и 2, размещенные в корпусе 3.
С ведущим валом связано водило 4 планетарного механизма, центральное колесо которого 5 закреплено на ведомом валу, а сателлиты 6 размещены в опорах 7 на воднле. Обоймы 8 установлены концен-трично сателлитам и свободно вращаются относительно сателлитов в опорах Э на зодиле.
В обоймах размещены инерционные грузы iO, выполненные в виде тел качения, с которыми взаимодействуют секторы 11, . закрепленные на осях 12 с опорами 13 на водиле. Секторы уравновешень oi-носнтелв но оси вращения и с помощью, иапрлмер, эуочатых (шлидевых) М5фт 14 связаны с сателпитами.. Боковые поверхности 15 секTOpoBj, контактирующие с инерционными гру замк, выпол-изны криволинейными, (например по дугам окружносги) с радиусом кривизны/ превышающим радиус- инерционного груза и имеют общую касательную плоскость 16 с внутренней поверхностью рбоймы. Инерционная муфтг циклически Полный цикл работы соответствует одному о-бороту сектора и вюиочает два периода, отличающиеся характером динамических связейо Период .t , инерционные грузы взаимодействуют с секторами It период II: инер ционные грузы взаимодействуют с обоймами 8, Период I соответствует повороту сектора на угол от О .до Д. 8О ; период Д повороту сектора с т 180 до 360 , Период 1„ При вращении ведущего вала 1 с час-.чэтой ведомый вал 2 под действием внещнего момента сопротивления вращается с частотой причем . цу . Сателлиты 6 и секторы 11 совёрщают сложное движение, враищясь вокруг co6ci венной и общей оси муфты. Грузы 10., находятся на боковых поверхностях 15 сект« IpoB (см, фигв 2) и также соверщают сложное движение, результатом которого являют Ья икерционные силы действующие на груз Юа Радиальные составляющие указанных сиЛа проходящие через ось вращения секте риз передаются через опоры 13 на водило 4, а тангенциальные - создают вращающий .момент на оси 12s сателлите 65 централь яом колесе 5 и ведомом валу 2„ В течение данного периода грузы 10, взаимодействуя с секторами 11, движутся к оси муфты и генерируют вращающий момент на ведомом валу 2: период заканчивае 0.5 когда центр масс груза дaкcимaльнo приближается к оси муфты и выходит на йрямую, соединяющую ее с осью вращения сектора il е р и о д IX о При дальнейщем поворо Тв сектора 11 инерционный груз 10 под йействием сил инерции переносного (с води яом 4) движения выходит из контакта с iSK-TOpoM и переходит на обойму 8 и, пере.,1эщаясь по которой, занимает положение в I .при котором-цаитр маис максимально удале муфты, т,ев находится на прямой «x о цйняющей ос1э муфты и ось сектора, Указанное положение груза является уо -ойчивым и сохраняется в течение всег . дэрйода II J при этом Ш1ерционные силы руза также направлены по указанной пря г.ой и через опоры 9 перэдаются на всднло 4, в результате чегч вращающий момеш; от на оси 12 отсутствует, Му4гга ра&о тает в режиме выбега, а ведомый вал 2 вращается по инерции. Затем сектор 11 догоняет груз 10 и контактирует с ним, затем цикл работы повторяется. Процесс взаимодействия груза с сектороМ происходит безударно, так как боковые поверхности 15 секторов вьшопнень криволи- нейными с радиусом кривизны, превьшшющим радиус инерционного груза и имеют общую касательную плоскость 16с внутренней поверхностью обоймы 8, которая свободно вращается в опорах 9, При высокой часлоте вращения вала 1 и м/.лом моменте сопротивления на валу 2. инерционные грузы 10, взаимодействуя сг секторами 11, блокируют муфту напрямую и обеспечивают жесткое соединение валов 1, 2. Ссответствующим выбором параметров муфты можно обеспечить сохранение даннсй; го положения в щироком диапазоне частот вращения. Инерционная муфта обратима, т.е. ведущим элементом может быть центральное ко.лесо 5, тогда ведомым будет водило 4, Плав ность работы муфты обусловлена числом грузов, размещенных на одном сателлите, и сотаетствующей угловой ориентацией секторов J В этой муфте опоры сателлитов нагружены только усйтГями от зацепления шестерен, которые малы по сравнению с инерционными силами гр за, что при ограниченных габар тах повышает срок спух/оы опор сателлитов по сравнению с известной муфтой и обеспе(чивает достижение цели настоящего иЗобрецёРия, Формулаизобретения Инерционная муфта, иодержйщая водило, ;несушэе сателлиты, сцепленные с иентоаяь 1ным колесом, а также инерционные грузы, размещенные в элементах, взакмодействукхщих с ними и соединенных с сателлитами, отличающаяся гем, что, с це.лью разгрузки опор сателлитов от действия центробежных сил для увеличения срока их жбы, она снабжена опорами, с помошью вторых в водиле установлены элементы, аимодействуюшне с инерци ннымн грузами, ьшолнепными в виде обоймы и расположенвнутрн нее секаоров с осями, связанным с сатегхлитамн, и с боковыми крнволиней kbiMH поверхностями, радиус кривизны которых превыишет радиус инерционного груза. ;н имеет общую касательную плоскость i внут.ренней поверхностью .
AJ
-н
12
1 /7/7777
ФигЛ
16
11
Iff
15
