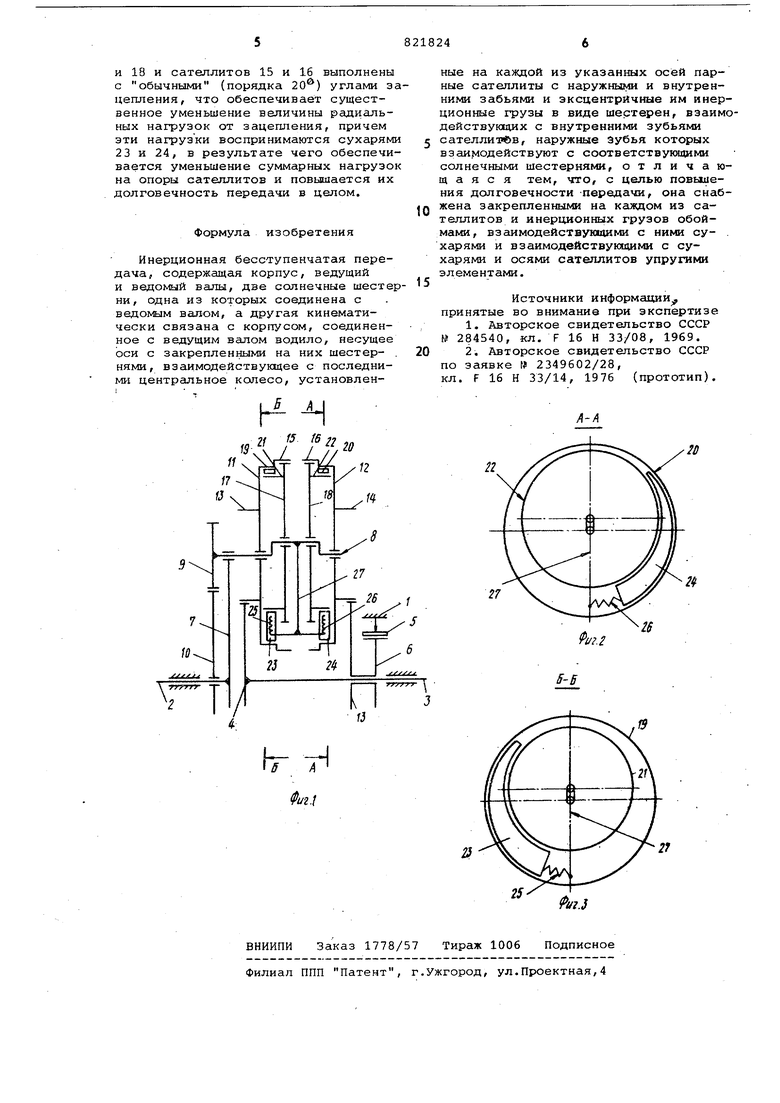
Изобретение относится к машиностроению и может быть использовано в качестве бесступенчатой передачи с автоматическим изменением частоты и вргицающего момента в зависимости от нагрузки на ведомом валу. Известна инерционная бесступенчатая передача, содержащая корпус, раз мещенные в нем ведущий и ведомлй валы, соединенное ведущим валом води ло с осями, на которых свободно установлены неуравновешенные сателли ты, и взаимодействуихцую с ними солнечную шестерню, связанную с ведокым валом и с корпусом через муфты свободного хода (ij . Недостатком этой передачи являетс наличие в ней муфт свободного хода имеющих низкую долговечность. Наиболее близкой к предлагаемой, по технической сущности является ине ционная бесступенчатая передача, содержащс1Я корпус, ведущий и ведомлй валы, две солнечные шестерни, одна из которых соединена с ведоким валом а другая кинематически связана с корпусом, соединенное с ведущим вало водило, несущее оси с закрепленными на них шестернями, взаимодействующее с последними центральное колесо, установленные на каждой из указанны: осей парные сателлиты с наружными и внутренними зубьями и эксцентричные им инерционные грузы в виде шестерен, взаимодействующих с внутренними зубьями сателлитов, наружные зубья которых взаимодействуют с соответствующими солнечными шестернями. В этой передаче зацепление сателли- тов с инерционными грузами выполнено самотормозящимся в одном из направлений вращения за счет больших углов зацепления порядка 70-80® И Недостатком этой передачи является действие, на опоры сателлитов больших радиальных нагрузок, что снижает долговечность передачи в целом. Цель изобретения - повыдение долговечности передачи уменьшения радиальных нагрузок на опоры сателлитов. Указанная цель дсютигаетсятем, что передача снабжена закрегшенныкм на каждом из сателлитов и инерционных грузов обоймами, взаимодействующими с ними сухарями и взаимодействующими с сухарями и осями сателлитов упругими элементами. При этом внутренийе зубья сателлитов и зубья инагоионных грузов выполнены с об1цепр 1нятыми углами зацепления (порядка 20), На фиг. 1 изображена кинематическа схема инерционной бесступенчатой передачи; на фиг. 2 - сечение А-А одного сателлита на фиг. 1/ на фиг.З сечение Б-Б другого сателлита на фи г. 1. Инерционная бесступенчатая переда ча содержит корпус 1, веду1ций вал 2 ведомый вал 3, соединенную с ним солнечную шестерню 4, связанную с ко пусом через управляемый тормоз 5 сол нечную шестерню б, соединенное с вед щим валом 2 водило 7, несущее оси 8 с закрепленными на них шестернями 9 взаимодействующее с ними центральное колесо 10, установленные на осях 8 парные сателлиты 11 и 12, имеющие наружные зубья 14 и 13 и внутренние зубья 15 и 16, установленные на тех же осях 8 эксцентрично по отношению к сателлитам инерционные грузы, выполненные в .виде шестерен 17 и 18, взаимодействующих с внутренними зубьями 15 и 16 сателлитов, наружные зубья 13 и 14 которых взаимодействуют соответственно с,солнечными шесте нями 4 и 6, закрепленные на сателлитах 11 и 12 обоймы 19 и 20, закрепленные на инерционных грузах обоймы 21 и 22, размещенные Между, обойм ми 19 и 21 и взаимодействующие с ними сухари 23, размещенные между обой мами 20 и 22 и взаимодействующие с ними сухари 24, упругие элементы 25 и 26, взаимодействующие соответстве но с сухарями 23 и 24 и с осями 8 через упоры 27. Сухари 23 и 24 выполнены в виде уравновешенных относительно оси 8 самотормозящихся кри линейных клиньев, поверхности которых эквидистантные поверхностям взаимодействую цих с ними обойм, а направления заклинивания их взаимно противоположны. Инерционная бесступенчатая передача работает следующим образом. При включенном тормозе 5 вращение ведущего вала 2 через водило 7, сателлиты 11 и 12 и солнечную шестерню 4 передается ведомому валу 3. При этом ведомый вал 3 вращается со скоростью меньшей, чем ведущий вал 2. Инерционные грузы (шестерни) 17 и 18 вращаются вокруг осей 8 и вмес те с водилом 7 и под действием центробежной силы стремятся занять наиболее удаленное положение от оси передачи 11 и 12 и солнечных шестерен 4 и 6. При отклонении центра ма комплекса грузов от указанного поло жения на оси 8 появляется знакопеременный инерционный вращающий момент, положительные импульсы кото рого обусловлены поворотом центра масс комплекта грузов на угол от О .до 18о9 а отрицательные - поворотом от 180-до 360 . Направления самоторможения сухарей 23 и 24 выбраны так, что под действием положительного 1иомента самотормозятся сухари .23, а под действием отрицательного момента - сухари 24. Тогда, при повороте центра масс комплекта на угол от 0°до 180 самотормозятся (блoкиpyютc) сухари 23,соединяя в одно целое инерционные грузы (шестерни) 17 и сателлиты 11. Грузы движутся к оси передачи и вращакхций момент от них через сателлиты 11 и солнечную шестерню 4 передается на ведомый вал 3. Инерционный момент от грузов, достигнув максимума, начинает уменьшаться и становится равным О, когда суммарный центр масс комплекта грузов максимально приближается к оси передачи и выходит на линию центров сателлитов 11 и шестерни 4. Пройдя указанное положение инерционные грузы (шестерни) 17 и 18 начинают удаляться от оси передачи, инерционный момент меняет свой знак (становится отрицательным), в результате чего обоймы 19 и 21 и сухари 23 растормаживаются, а обоймы 20 и 22 и сухари 24 затормаживаются, соединяя в одно целое грузы 18 и сателлиты 12, Вращающий момент через сателлиты 12, солнечную шестерню б, и тормоз 5 передается на корпус 1, создавая на нем реактивный момент опоры. При движении грузов вращающий момент, достигнув максимума, начинает уменьшаться и становится равным О, когда суммарный центр масс комплекта грузов 17 и 18 максимально удаляется от оси перемещения и, совершив поворот на угол от 180°до 360° выходит на линию центров наружных зубьев 13 и центральной шестерни 4. Затем, момент меняет знак, обоймы 20 и 22 и сухари 24 растормаживаются, а обойки 19 и 21 и сухари 23 затормаживаются и-цикл работы передачи повторяется. При этом синхронное движение каждого комплекта инерционных грузов 17 и 18 в течение цикла обеспечивается соединением осей 8 с шестернями 9, взаимодействующигли с центральным колесом 10, а прижатие контактирукадих поверхностей, сухарей 23 и 24 и обойм 19-21 обеспечивается упругими элементами 25 и 26, которые через упоры 27 соединены с осями 8. Перевод инерционной бесступенчатой передачи в режим динамической муфты осуществляется выключением тормоза 5, При этом передача превращается в соосную механическую систему без внешней опоры момента, для которой вращающие моменты на ведущем 2 и ведомом 3 валах равны по величине при любом соотнсвлении частот вращения указанных валов. В предлагаемой инерционной бесступенчатой передаче зубья шестерен 17 и IS и сателлитов 15 и 16 выполнены с обычными (порядка 20) углами за цепления, что обеспечивает существенное уменьшение величины радиальных нагрузок от зацепления, причем эти нагрузки воспринимаются сухарями 23 и 24, в результате чего обеспечивается уменьшение суммарных нагрузок на опоры сателлитоз и повышается их долговечность передачи в целом. Формула изобретения Инерционная бесступенчатая передача, содержащая корпус/ ведущий и ведомый валы, две солнечные шестер ни, одна из которых соединена с ведомым валом, а другая кинематически связана с корпусом, соединенное с ведущим валом водило, несущее оси с закрепленными на них шестернями, взаимодействуюдее с последними центральное колесо, установленные на каждой из указанных осей парные сателлиты с наружными и внутренними забьями и эксцентричные им инерционные грузы в виде шестерен, взаимодействукхдих с внутренними зубьями сателлитов, наружные зубья которых взаимодействуют с соответствующими солнечными шестернями, отличающаяся тем, что, с целью повышения долговечности -передачи, она снабжена закрепленными на каждом из сателлитов и инерционных грузов обоймами, взаимодействукщими с ними су- . харями и взаимодействующими с сухарями и осями сателлитов упругими элементами. Источники информации,, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 284540, кл. F 16 Н 33/08, 1969. 2.Авторское свидетельство СССР по заявке № 2349602/28, кл. F 16 Н 33/14, 1976 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Инерционная бесступенчатая передача | 1976 |
|
SU742654A1 |
| Инерционная передача | 1989 |
|
SU1633211A1 |
| Инерционная бесступенчатаяпЕРЕдАчА | 1978 |
|
SU811019A1 |
| Выпрямитель момента импульсного механизма | 1980 |
|
SU905554A1 |
| Инерционная муфта | 1974 |
|
SU518586A1 |
| Инерционная муфта | 1976 |
|
SU916804A2 |
| Буровой станок | 1987 |
|
SU1504322A2 |
| Инерционно-импульсная бесступенчатая передача | 1980 |
|
SU929925A1 |
| Планетарный инерционно-импульсный механизм | 1978 |
|
SU832180A1 |
| ЛЕГКОВОЙ ВЕЛОМОБИЛЬ, ПРИВОДИМЫЙ В ДВИЖЕНИЕ МУСКУЛЬНОЙ СИЛОЙ НОГ, СПИНЫ, РУК, ВЕСОМ ВОДИТЕЛЯ И ГРУЗА | 1996 |
|
RU2124450C1 |
г
27
