(54) ПРЕЦИЗИОННАЯ СТАНИНА
| название | год | авторы | номер документа |
|---|---|---|---|
| Прецизионная станина | 1980 |
|
SU991671A1 |
| Станок портального типа | 1985 |
|
SU1399075A1 |
| Прецизионный портальный станок | 1978 |
|
SU787142A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ СИЛОВЫХ ДЕФОРМАЦИЙ СТАНИНЫ КООРДИНАТНО-РАСТОЧНОГО СТАНКА | 2014 |
|
RU2575508C1 |
| Устройство для установки высокоточных машин на фундаменте | 1974 |
|
SU494237A1 |
| УСТРОЙСТВО для КРЕПЛЕНИЯ СТАНИН | 1971 |
|
SU310087A1 |
| Способ сборки кузовов вагонов с рамами малой жесткости | 2022 |
|
RU2797221C1 |
| МЕХАНИЗИРОВАННАЯ КРЕПЬ ДЛЯ КРУТЫХ ПЛАСТОВ | 2007 |
|
RU2357083C1 |
| "Способ установки крупногабаритной детали типа "станина" | 1990 |
|
SU1787736A1 |
| Опалубка для бетонирования наклонных и криволинейных граней гидротехнических сооружений | 1982 |
|
SU1036882A1 |
Изобретение относится к области станкостроения и может быть использовано для высокоточных устройств, на-пример координатно-расточных ставков.
В настоящее время в прецизионно:м станкостроении для обеспечения .нео.бходимой прямолинейности и плоскостности направляющих станин используются следящие системы компенсации прогиба станины, так как увеличение жесткости станины связано с увеличение.м ее веса и это не всегда дает хорошие результаты.
Известно устройство, предназначенное для этой цели, работающее -по принципу обратной связи и содержащее размещенные внутри стаНИНЫ базовые балки, сво-бодно лежащие на своих олорах и .параллельные направляющим; отдельный для «аждой базовой балки датчик, взаи модействующий с нею и реагирующий на прогибы соответствующей направляющей; Еопомо,гательную тидравличеокую опору станины, расположенную под каждой направляющей, взаимодействующую с органом для регулировки давления, .которое линейно зависит от величины прогиба направляющей и создает усилие, устраняющее этот прогиб.
Однако в известном устройстве размещение вспомогательных, опор и базовой балки непосредственно под направляющими .в .сочетании с расположением основных опор, удалекных одна от другой на более значительное
устраняет поперечного прогирасстояние,
ба станины. По этой причине органы станка, распололченные на станине, поворачиваются в поперечной вертикальной плоскости. В частности, в координатно-расточном станке портального типа происходит поворот стоек, на которых базируются подвижная поперечина со шпиндельной головкой и вторая шпиндельная головка, в результате чего нарушается точное положение осей шпинделей относительно плоскости стола.
Поскольку базовые балки не связаны одна с другой, то прн за-кручиванни станины вокруг ее поперечной оси базовые балки смещаются .вместе с направляющими станины и датчики не выдают сигнала об ошибке, хотя в действительности она имеется.
Целью предлагаемого изобретения является создание устройства для компенсации прогиба станины, которое бы обеспечивало стабильное положение направляющих станины в поперечном направлении, т. е. устранение поперечного лрогиба станины, и устранение отрицательного эффекта закручивания станины.
Для этого в предлагаемой прецизионной станции базовая балка выполнена П-образной формы и уста.новлена на трех опорах, совмещенных с опорами станины.
Кроме того, :На каждой прямолинейной
части балки установлено не менее одного датчика деформации, которые угфавляют соответсТ(Вующи,ми дополнительными регулируемьвми опорами. Средняя часть П-образной балки расположена на средней опоре станины, установленной ino ее оси, а ее концы - на двух крайних опорах, размещенных ио краям станины. Свободные концы П-образной балки на крайних опорах расположены не непосредсрвенво, а через промежуточ-ную прямолинейную дополнительную балку, установленную на крайних опорах поперек станины. Дополнительные регулируемые опоры tpasivieщгны между основными опорами Станины. Опоры станины совмещены с опорами базовых |бало1К, а -последние выполнены в виде сухарей, расположенных iB отверстиях основания станины.
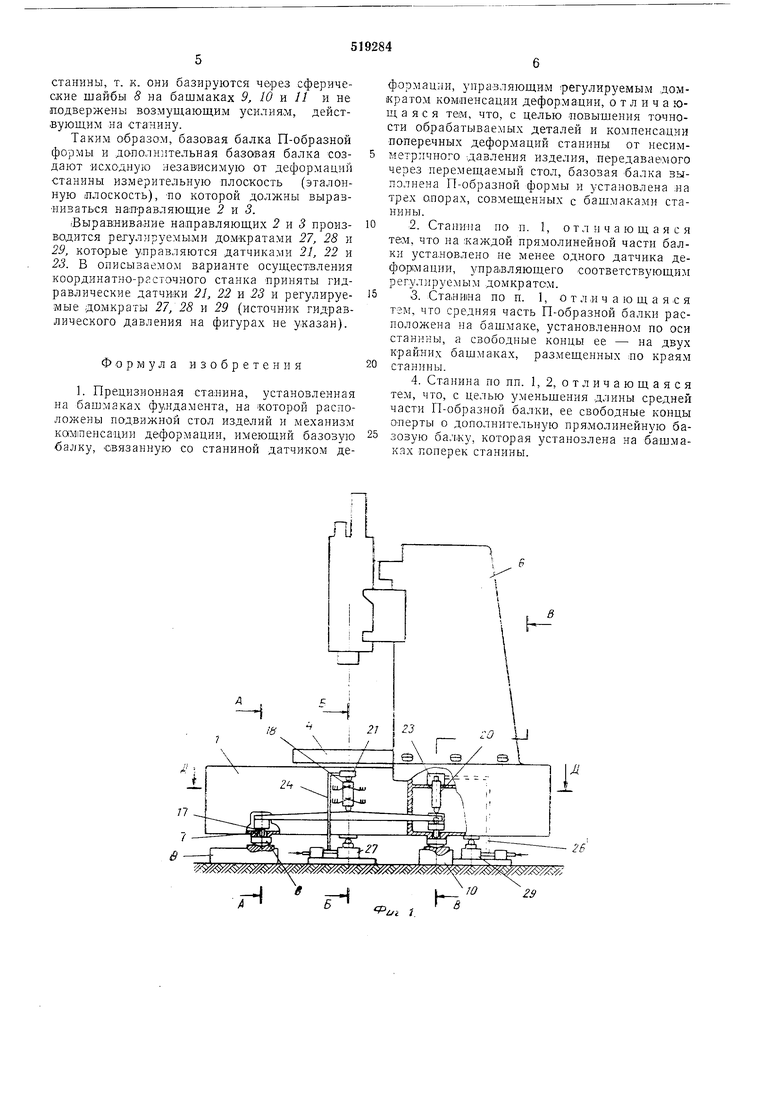
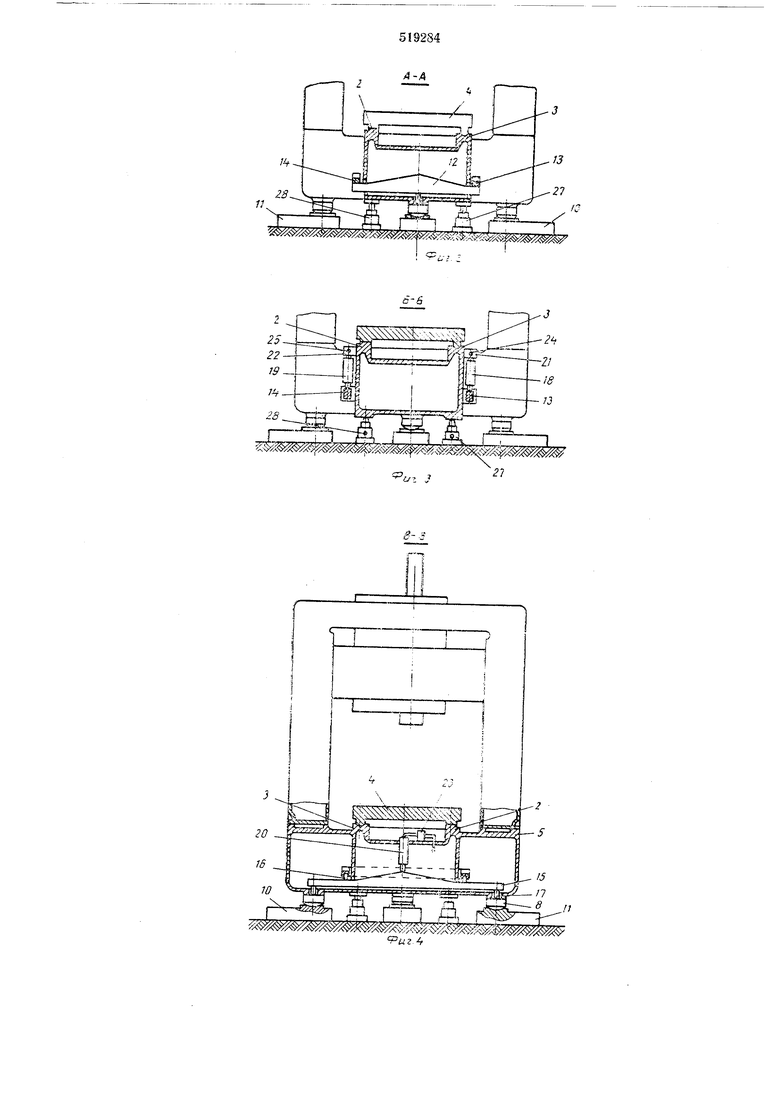
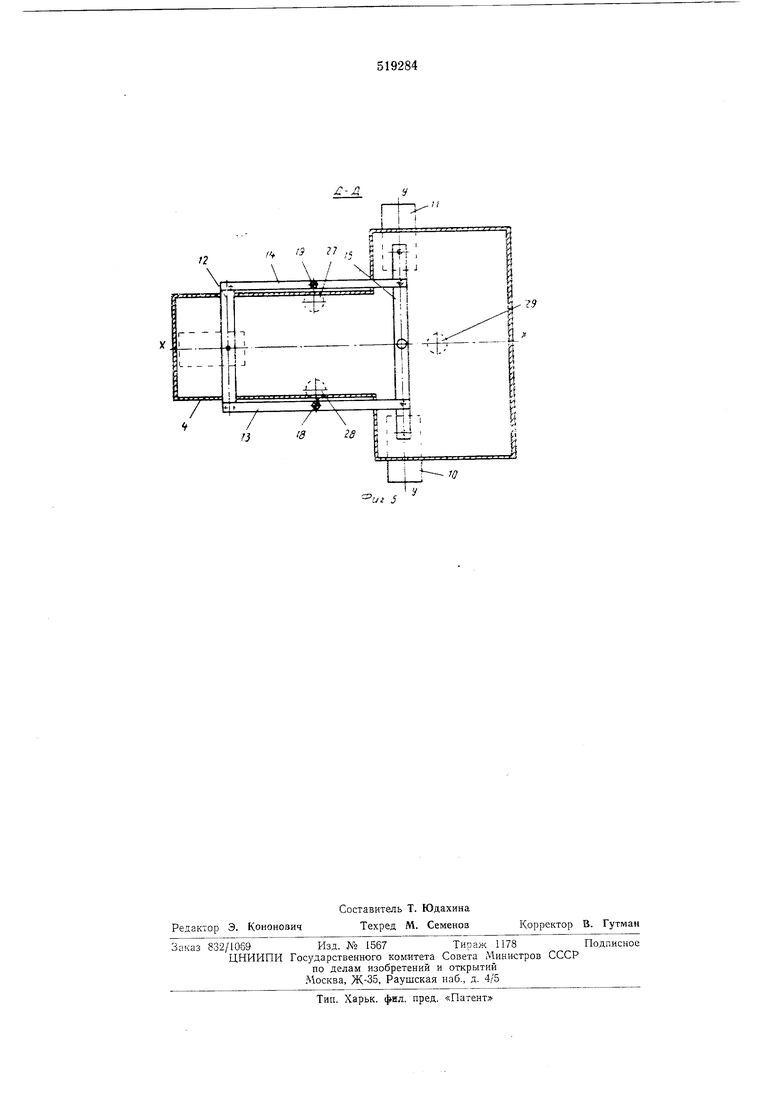
На фиг. 1 изображен координатно-расточный станок с частичными выры-вами ПО олорам, вид сбоку; на фиг. 2 - разрез по А-А на фиг. 1; на -фиг. 3 - -разрез по Б-Б на фиг. 1; на фиг. 4 - разрез по S-Б на фиг. 1; на .фиг. 5 - разрез по Д-Д на фиг. 1.
На чертежах .показано для примера применение предлагаемой прецизионной станииы в координатно-расточно.м станке портального типа.
Лрецизионная станина состоит из двух основных узлов: станины (основания), на которой монтируются все узлы станка и механизма компенсации деформации.
Основапие / представляет собой деталь коробчатой формы, в (которой сверху выполнены направляющие 2 и 5, да которых смонтирован стол 4. Сверху также расположены платики 5, на которых монтируются стойки 6, несущие рабочие органы .станка.
На нижней стенке основания / выполнены три платика 7, один из которых расположен по оси станины, а два других по краям. К Платикам 7 жестко прикреплены сферические шайбы 8, .которыми основание / опирается о башма-ки 9, 10, 11, имеющие сферической формы углубления.
На основании / смонтирован -механизм компенсации деформации, содержащий б.азовую балку, состоящую из трех прямолинейных балок 12, 13 и 14. Балка 12 расположена поперек оси сганины, а бадки 13 и 14 - вдоль нее.
Балки 13 и 14 одними свои.ми концами жестко скреплены с «онцами бал.ки 12 и образуют жесткую П-образную конструкцию. Другие концы балок 13 и 14 свободно лежат на дополнительной прямолинейной базовой балке 15, расположенной поперек станины (см. .фиг. 5).
В концы балок 13 и 14 вставлены штифты 16 с полукруглыми головками, .которые и находятся в контакте с плоскими поверхностями балки 15. Это сдела.но .для исключения возможности возни.кновения кромочных давлений -между балка.ми 12, 13 и 14.
Базовая балка П-образной формы, состоящая из балок 12, L3 и 14 и сочлененная с .ней дополнительная базовая балка 15 о.пираются через сферические шайбы 8 о башмаки 9, 10 и // в трех точках: 1посередине балки 12 и по концам балки 15 через -сухари 17, расположенные в отверстиях, выполненных в нижней стенке станины. Сухари 17 имеют полукруглые головки.
Следует отметить, что возможно конструктивное выполнение предложенной прецизионной станины и без дополнительной базовой балки 15. При этом свободные концы балок 18 и 14 должны быть снабж.ены сухарями 17
и через них опираться о башмажи /( и // через сферические шайбы 8. Однако такой вариант будет иметь недостаток - балка 12 должна будет иметь .длину -дополнительной базовой балки il5 (см. фиг. 5), что увеличит
габариты координатно-расточного станка.
Совмещение опор основания / и системы базовых балок соз.дает наиболее благоприятные условия 1ДЛЯ поддержания стабильно1го положения базовых балок относительно .направляющих 3 и 3.
Середины балок 12, 13 и 14 соединены через передаточные элементы 18, 19 к 20 с датчиками 21, 22 и 23, :прикрепленны.ми к основанию ./.
Датчики 21, 22 и 23 соединены следящими каналами 24, 25 и 26 (они могут быть носителями различной сре;ды, например, гидравлическими) с регулируемыми домкратами 27, 28 и 29, источник силы которых на фигурах
не показан.
Регулируемые домкраты 27, 28 и 29 устанавливаются на фунда.менте между башмаками 9.
Работает предлагаемая прецизионная станина следующим образом.
При обработке тяжелых деталей, за.крепленных на подвижном столе 4, направляющие 2 и 5 от .веса иаделия и усилия резания могут получить следующие положения вследствие
деформации, изгиб в продольном направлении при сохранении параллельности направля:ющих 2 w. 3 между собой; разворот направляющих в .поперечном направлении (закручивание направляющих) вследствие сложного изгиба станины выпуклостью BiBepx от реакции бащ1мака 9 и выпуклостью вниз от реа.к-ций ба.щма.кО|В 10 и U; раз(ворот направляющих .в продольном направлении вследствие -.смещения края одной из направляющих от дейстВИЯ несимметричного давления изделия; сов.местное действие указанных вы-ще деформаций.
Указанные положения направляющих получаются при стабильном лоложении башмаков 9, 10 и /7 за счет деформации стенок станины.
(Базовая -балка П-образной формы, состоящая из балок 1:2, .13 и 14, и сочленевная с ней .дополнительная базовая балка 15 не изменяют своего положения при деформациях
станины, т. к. они базируются через сферические шайбы 8 на башмаках 9, 10 и 11 и не подвержены возмущающим усилиям, действующим на станину.
Таким образом, базовая балка П-образной формы и до-полн тельная базавая балка создают исходную независимую от деформаций станины измерительную плоскость (эталонную .плоскость), ПО которой должны выразниватьСЯ направляющие 2 ъ 3.
(Выравнивание направляющих 2 и 5 производится регулируемыми домкратами 27, 28 и 29, которые управляются датчиками 21, 22 и 23. В описываемом варианте осуществления координатно-ргсточного станка приняты гидравлические датчики 21, 22 и 23 и регулируемые домкраты 27, 28 и 29 (источник гидравлического давления на фигурах не указан).
Формула изобретения
21 23
20 1|
Г
/ в е/ Q I
г/г i
А-А
S$
I .:
21
иг J
Р«г-4
/5 :ш:
12 У / xj4iv
