(54) ЛИНИЯ ДЛЯ РАСФАСОВКИ ЖИДКОСТЕЙ В БОЧКИ
| название | год | авторы | номер документа |
|---|---|---|---|
| МАШИНА ДЛЯ МОЙКИ БОЧЕК | 1971 |
|
SU426726A1 |
| УСТРОЙСТВО ДЛЯ УТИЛИЗАЦИИ ИСПОЛЬЗОВАННОЙ МЕТАЛЛИЧЕСКОЙ БОЧКОТАРЫ | 2003 |
|
RU2268146C2 |
| Агрегат для укладки тротуарных плиток | 2020 |
|
RU2740596C1 |
| Устройство для ориентации и запрессовки втулок с полостями на внутренней поверхности | 1987 |
|
SU1511043A1 |
| Устройство для взвешивания, укупорки и маркировки бочек | 1953 |
|
SU99700A1 |
| Способ укупорки деревянных бочек и устройство для его осуществления | 1983 |
|
SU1122608A1 |
| Линия для изготовления доньев бочек | 1983 |
|
SU1147566A1 |
| Станок для изготовления электрических катушек | 1983 |
|
SU1220021A1 |
| Устройство для вскрытия и укупорки бочек | 1974 |
|
SU558790A1 |
| Станок для намотки катушек электрических машин на ребро | 1985 |
|
SU1310957A1 |

1
Известна линия для расфасовки жидкостей Б бочки, состоящая из расположенных по ходу технологического процесса накопителя, отсекателя, кантователя, механизма для ориентирования устройств для отвинчнвания, наполнения и завинчивания пробок на бочках и механизма для перемещения бочек. С целью упрощения конструкции и надежности линии в работе в предлагаемой линии механизм для ориентирования расположен под устройством для отвинчивания пробок и содержит поворотную относительно вертикаль-, ного вала плйт ;:горму с укрепленньшпи на ней по окру кности зажимами для крепления бочэк. Устройство ДЛИ отвинчивания пробок со держит смонтированное на вертикальном валу водило с прижимом и укрепленным на нем зхасадком под пробку, постоянньп« магнитом и самоцентрирующейся муфтой.
С&моценткру1г.ш.аяся муф1« состоит из дцух полумуфт, верхняя из которых имеет конический выступ и укреплена на валу привода а нйлшйя коническое отверстие и штифты для соед1шени;й ее через плавающий диск с радиальны.с: для штифтов с укрепленным на валу водила диском, при этом последний снабжен штифтами, входящими в пазы плавающего диска.
Кроме того, с целью компенсации отклонений геометрических размеров водило смонтировано с возможностью вертикального и горизонтального перемещений и снабжено хвостовиком и роликами, расположенными на втулке прижима.
Механизм для перемещения бочек состо ит из смонтированных с возможностью возвратно-поступательного перемещения и поворота штанги, укрепленных на ней рычагов с толкателями и прижимами и кулачков для взаимодействия с расположенньп на раме гидравлическим дросселем.
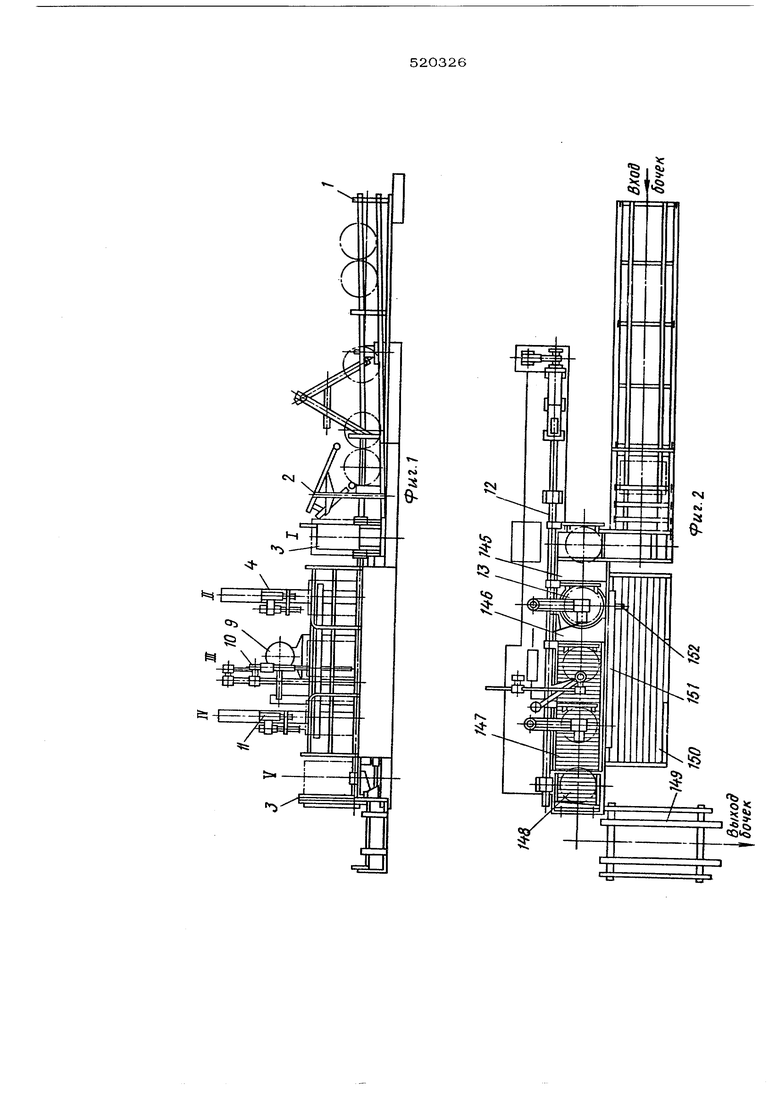
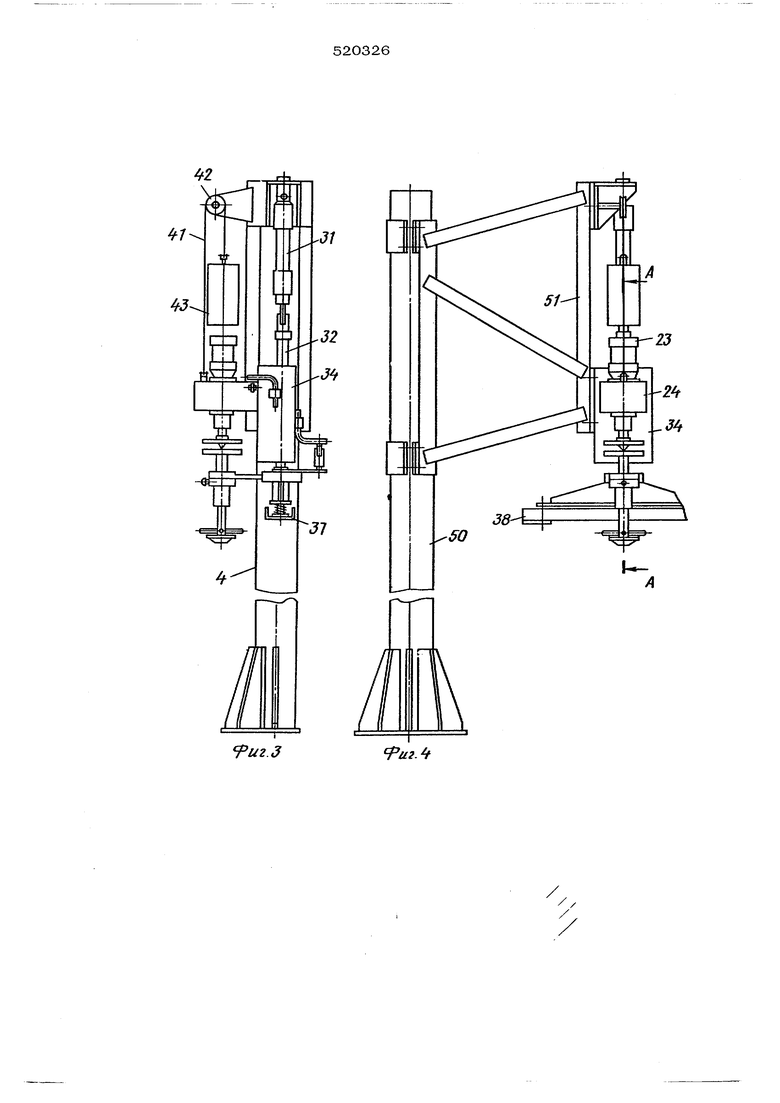
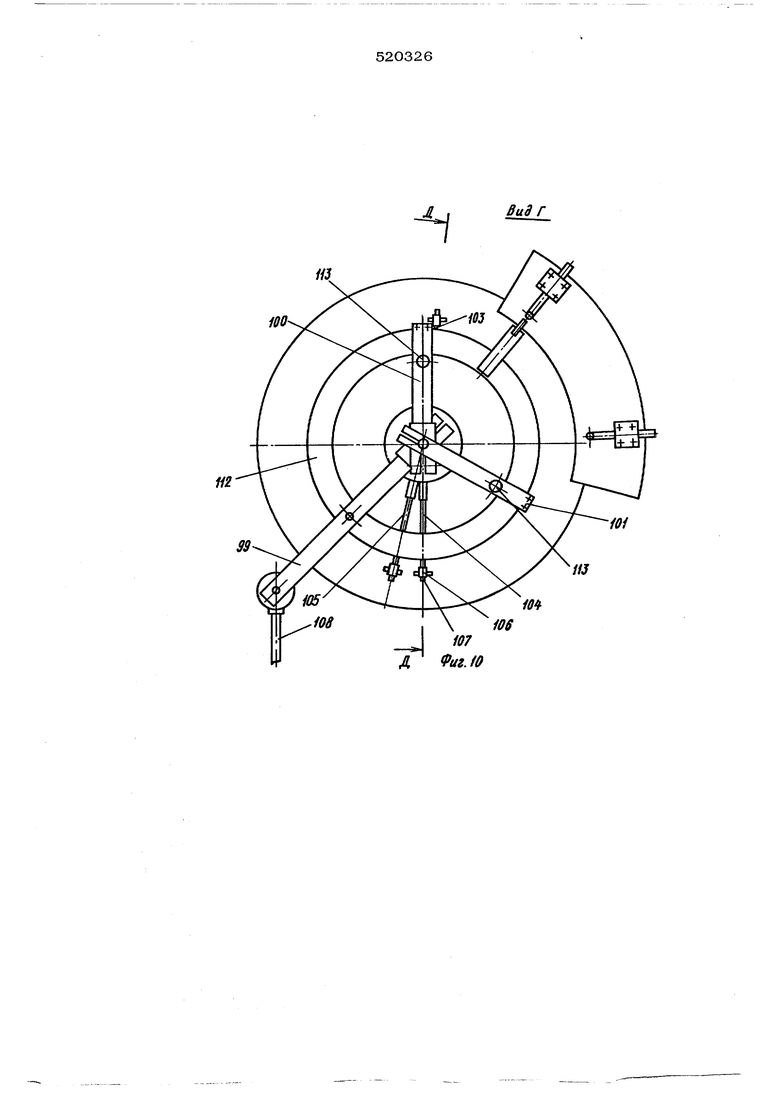
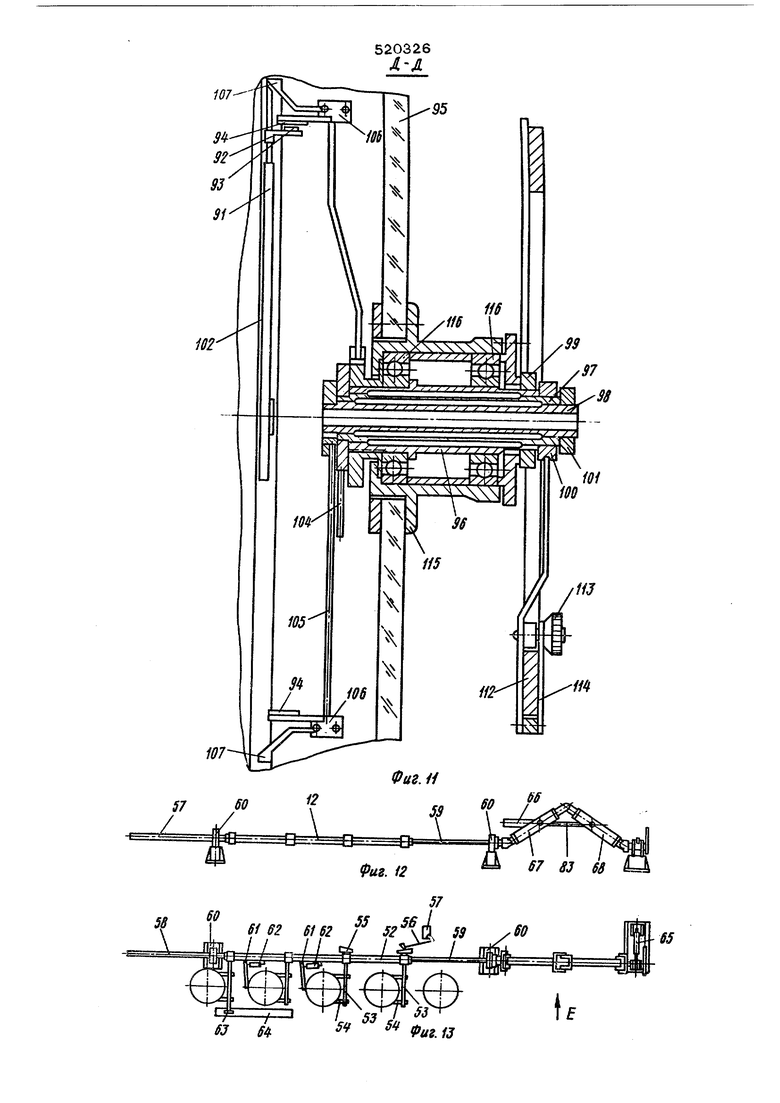
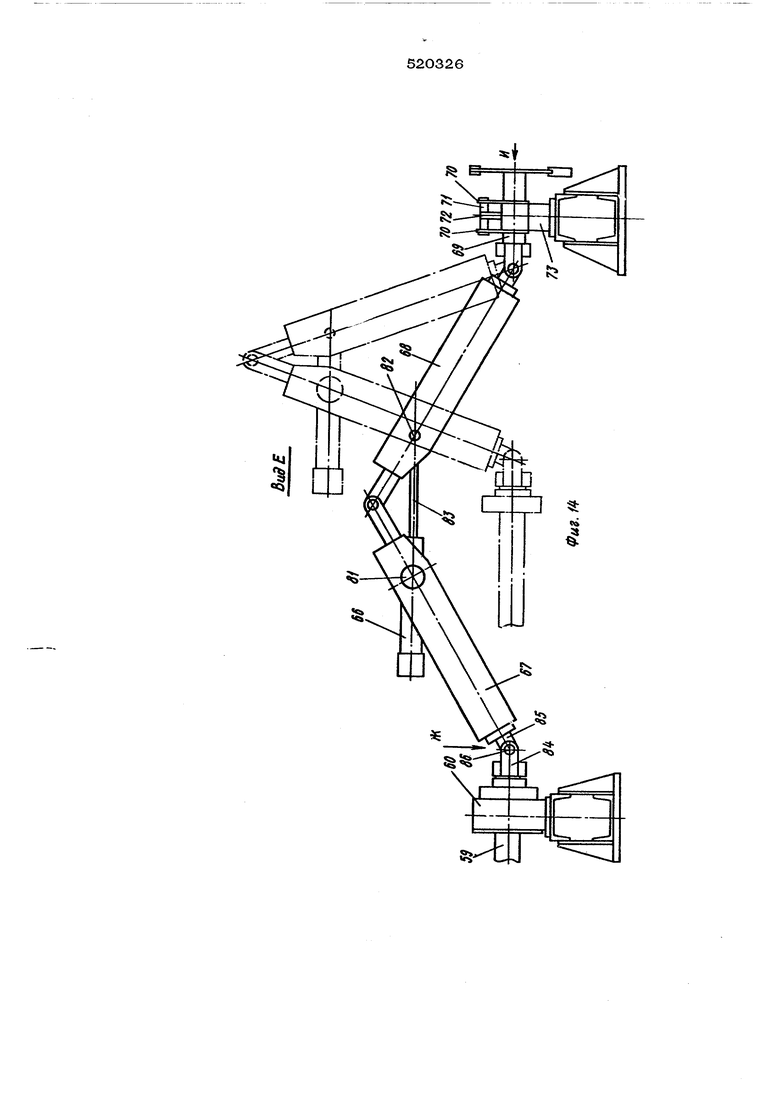
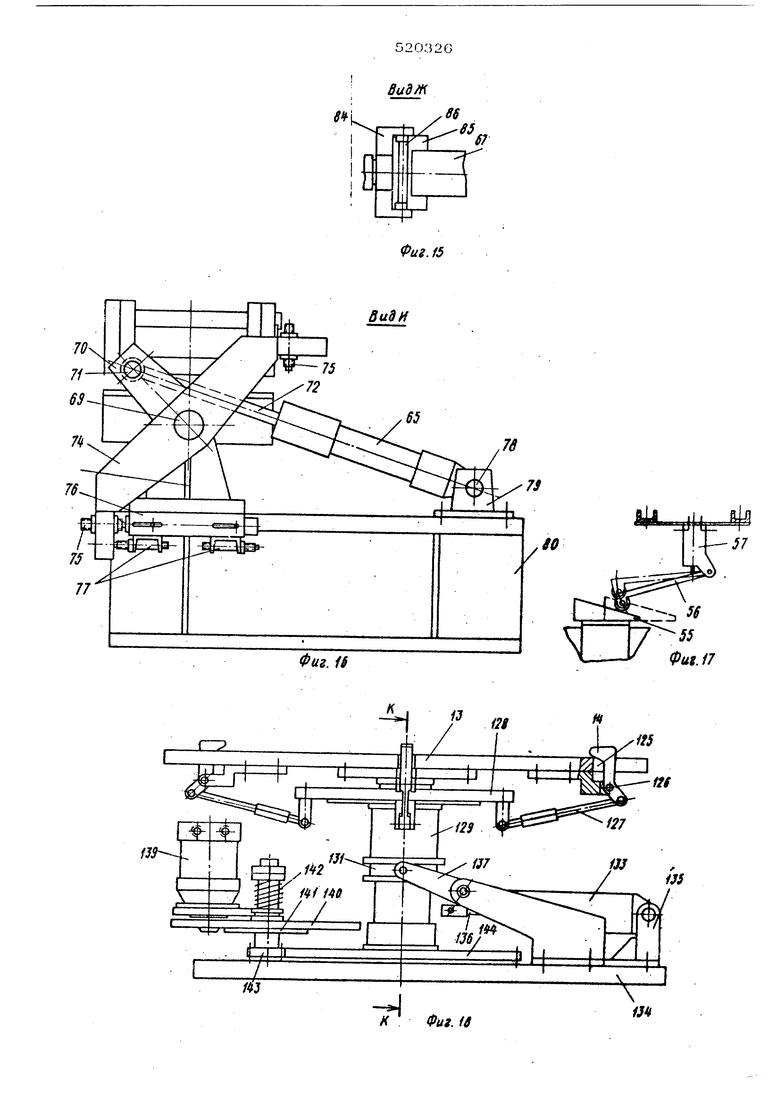
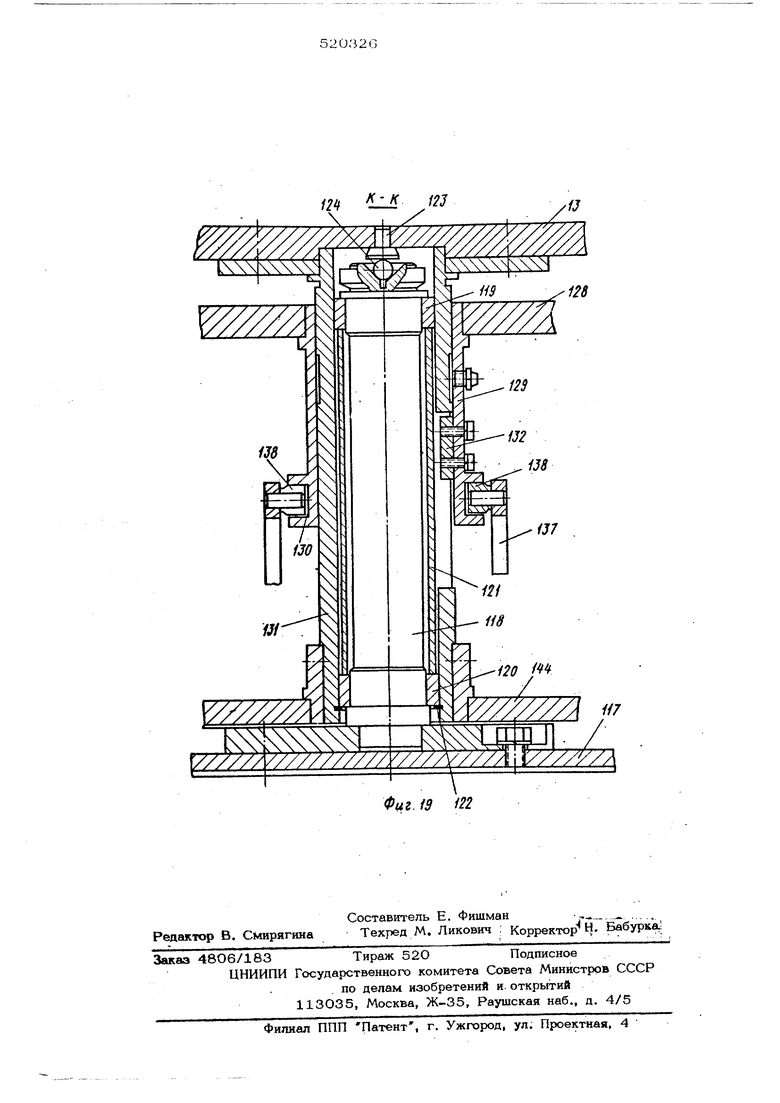
На фиг. 1 показана предлагаемая линия для расфасовки жидкостей в бочки, общий вид; на фиг. 2 - то же, вдд сверху; на фиг. 3 - механизм для ориентирования, совмещенный с устройством для отвинчивания пробок, общий вид; на фиг. 4 - то же, вид сбоку; на фиг. 5 - разрез по А-А на фиг. 4; на фиг. 6 - по Б-Б на фиг. 5; на фиг. 7 - разрез по В-В на фиг. 5; на фиг.8весовой дозатор, общий ввд; на фиг. 9 то же, вид сбоку; на фиг. 10 - вид по стрелке Г на фиг. 9; на фиг.- 11 - разрез по Д-Д на фиг. 10; на фиг. 12 - устройство для перемещения бочек из позиции в позицию; на -фиг. 13 - то же, вид сверху; на фиг. 14 - вид по стрелке Е на фиг. 13; на фиг. 15-вид по стрелке Ж на фиг. 14;. на фиг. 16 - вид по стрелке И на фиг. 14; на фвг. 17 - схема изменения скорости поступательнотх перемещения штанги Б начале передвижения бочки; на фиг. 18 - вращающаяся платформа устройства ориентирования бочек по положению пробки; на фиг. 19разрез по К-К на фиг. 18. Ливня для расфасовки жидкостей в бочки содержит накопитель 1, отсекатель , кантов - тель 3, перемещающий порожнюю бочку вертикальное положение пробкой вверх; механизм 4 для ориентирования, расположенное над последним устройство для отвинчивания пробок, включающее смонтированное на валу 5 водило 6 с прижимом и укрепленным на нем насадком 7, постоянный магнит 8 и самоцентрирующуюся муфту; устройство для наполнения, включающее весовой дозатор 9 и наЛввной стояк 10; устройство 11 для завинчивания пробок на бочках и механизм 12 для перемещения бочек. Механизм 4 для ориентирования содержит поверхностную относительно вертикальной оси платформу 13 с укрепленными на ней по окружности зажимами 14 для крепления бочек. Самоцентрирующаяся муфта состоит из пояумуфт 15 и 16. Полумуфта 15 имеет конусный выступ 17, центрирующийся пальцем 18, и зубья 19. Полумуфта 16 имеет штифты 20, коническое отверстие 21 и зубья 22. Привод устройства для отвинчивания пробок осуществляется от гвдромотора2 через редуктор 24 с приводным валом 25 по средством самоцентрирующейся муфты и пла вающего диска 26, в радиальные прорези 27 которого входят щтифты 2О полумуфты 16 и щтифты 28 диска 29, укрепленного на валу 5. Водило 6 снабжено хвостовиком 30 и выполнено с возможностью перемещения в вертикальной плоскости от гидроцилиндра 31 шток которого соединен со скалкой 32, скол зящей в направляющих втулках ЗЗ неподвиж ного корпуса 34 и в горизонтальной плоскости на втулке 35 прижима,свободно дов рачивающейся на скалке 32 по роликам 36 каретки 37.На конце скалки 32 закреплен црижим 38 выполненный в виде равноплечей банки. К корпусу 34 прикреплен магнитоуправлн емый контакт взаимодействующий с маг нитом 8 для остановки поворота платформы 13. Гидромотор 23 с редуктором 24 устайов лен с возможностью перемещения до направлшощей 4О,. расположенной в корпусе 34, и скалке 32, при этом к редуктору через трос 41 и блок 42 подвещен противовес 43. Перемещение редуктора 24 по скалке 32 ограничивается заштифтованным кольком 44 Вал 5 устройства для отвинчивания пробок закреплен в водиле 6 с помощью фиксатора 45, входящего в проточку 46 вала и закрепленного в обойме 47, связанной с под- пружиненной кнопкой 48. Для удобства ввода насадка 7 в горловину бочки вал 5 снабжен рукояткой 49. Механизм 4 для ориентирования и устройство для отвинчивания укреплены на колонне 5О с помощью кронштейнов 51. Механизм 12 для перемещения бочек состоит из смонтированной с воамокшостью возвратно-поступательного перемещения 52, укрепленных на ней рьмагов 53 с толкателями 54, прижимов и кулачков 55 для взаимодействия посред.:.твом рычага 5 6 с гщ1равлическим дросселем 57, На обоих концах штанги 52 укреплены скалки 58 и 59, размещенные в сферических опорах 6О. Прижимы вьшопнены в виде шарнирно закреш енных на штанге рычагов 61., прижимающих бочку к толкателям 54 с помощью гвдропиякидров 62, шток и корпус которых шарнирно свяБены соответстве1-шо с рычага ми 61 и штангой 52, Один из рычагов(;:;а. пример, последний по ходу передВ1апкения бо.« чек) снабжен роликом 63, опираюш гмся на направляющую 64, ограничивающую опускание рычагов 53 с топкателя1 «и 54. Поворот и перемещение штанги 52 соответственно осуществляются от ггедроцилшщров 65 и 66 посредством скалки 59, рычагов 67 и 68 и вала 69, на закреплены рычаги 70, шарнирно соединенные кривошипом 71 со штожсм 72 гидроцилнндра 65. Вал 69 поворачивается в опоре 73. Угол поворота вала 69 и ее ответственно штанги 52 ограничивается упором коромысла 74, снабженного 7S; через амортизатор 76 И огравичите/ш 77, при STOM гидроцилиндр 65, шарнирно соединенный пальцем 78 с кронштейном 7S, опора 73 и амортизатор 76 закреплекы на общем подрамнике 80,. Рычаги 67 и 68 посредством шарниров 81 и 82 совщгйеньз соответственно с гвдретщ;г;:;адром 66 и его штоком 83. Угол, образуемь : рычагами В7 и 68 и измеряемый S3 гидроаилиндра 66, определяв поступательное иеремешенае штанги 52. Скорость постунления масла в гщдроцилиддр 66 и соответственно скорость поступательного перемещения штанги 52 регулируются дросселем 57. Рычаг 67 со скалкой 59 связан посредством вилок 84 и 85, соединенных пальцем 86. Весовой дозатор 9 включает весовое устройство 87 с циферблатным указателем 88 и платформу 89 с установленным на ней рольгангом 9О, по которому пере двигается бочка, на циферблатном указателе 88 установлены магнитоуправляемые аадатчики дозы, а стрелка 91 циферблатного указателя 88 снабжена укрепленным накроН штейне 92 магнитом 93, который действует на магнитоуправляемые контакты 94 задатчиков дозы. Задатчики дозы состоят из закрепленных с наружной стороны прозрачного диска 95, расположенных на втулках 96, 97 и 98 рычагов 99, 100, lOlj связанных с расположенными между внутренней стороной диска 95 и циферблатом 1О2 поводками ЮЗ, 1О4 и 105. На конце каждого такого диска смонтированы кронштейны 106 с магаитоуправляемыми контактами 94 и флажками 107. Рычаг 99 шарнирно соединен с тягой 10 тензером 1О9 и штоком НО гидроцилшщра 111, а рычаги 1ОО и 1О1 укреплены с возможностью поворота относительно центра циферблатного указателя 88 на лимбе 11 с помощью барашков 113 и упругой пласти ки 114. Поворачиваются рычаги 99, 1ОО и 101 в корпусе 115 при помощи подшипников 116 Устройство 11 для завинчивания пробок выполнено аналогичным устройству для отвинчивания пробок, но не содержит магнитоуправляемого контакта 39 и магнита 8. Кро ме, того; гидромотор 23 имеет обратное на правление вращения, зубья 19 и 22 полумуфт 15 и 16 также имеют обратное направ ление. Вращающаяся платформа 13 механизма для ориентирования содержит основание 117 с вертикальной осью 118, втулками 119 и 12О, между которыми установлена распор ная втулка 121. Втулка 12О опирается на кольцо 122. Платформа 13 через грибок 12 и шарик 124 опирается на ось 118, В вырезах 125 платформы 13 расположены зажимы 14 для центрования и зажима бочек снизу. Зажимы 14 вьшо/шены х; возможностью поворота на пальцах 126 посредством тяг 127, закрепленных на диске 128, ступица 129 которого имеет кольцевую канавку 130. Поворот ступицы 129 относительно стуллаы 131 платформы 13 ограничен 6 шпонкой 132. Центрирование и зажим бочек зажимами 14 осуществляется от гидроцилиндра 133, укрепленного на основании 134 посредством стойки 135. Шток 136 гидроцилиндра 133 шарнирио соединен с рычагом 137, ройики 138 которого заходят в кольцевую каиавку 13О. Привод платформы 13 осуществляется от гидромотора 139 через шестерню 140, фрикционную шайбу 141 с пружиной 142 и пару шестереи 143 и . Линия включает также неподвижные плоскости 145 и 146 для передвижения пустых бочек, рольганги 147 и 148 соответствеиио под устройством 11 для завинчивания пробок, на платформе кантователя 3 для заполненных бочек и пандусе 149 для сбрасывания заполненных бочек, ллатформу 15О для оператора, пульт 151 для управления наладочным и автоматическим режимами и педаль 152 для остановки вращения платформы 13. Линия расфасовки жидкостей в бочки работает следующим образом. Порожние бочки поступают на накопитель 1 ориентированными днищем и пробками в сторону пульта 151 управления {т.е. к оператору) и скатьшаются под действием собственного веса к отсекателю 2, который подает их по одной на кантователь 3. Последний перемещает бочку в вертикальное положение так, чтобы днище с пробкой находилось вверху и подает ее в 1 позицию. Дальнейшее передвижение бочки из позиции в позицию осуществляется механизмом 12 для перемещения бочки, на скалку 59 кото рого воздействуют усилия взаимосвязанных рычагов 67, 68 и вала 69. Это воздействие осуществляется следующим образом. По команде электроавтоматики О поришевую полость гидроцшшндра 66 подается давление, в результате чего рычаг 67, соединенный с гидроцилшщром 66, и рычаг 68, соединенный со штоком 83 гидроцилиндра 66, взаимно перемещаются, обеспечивая возвратно-поступательное движение скалки 59, поскольку вал 69 не чожет продольно перемещаться в опоре 73, При движении скалки 59 в опорах 6О перемещаются влево и скалка 58, и щтанга 52 с закрепленными на нем рьиагами 53 с толкателями 54, с помощью первого рычага (по ходу перемещения бочек) передвигается бочка из 1 позшши зю П (из П в Ш и т.д.). После этого штанга 52 с помощью гидроцилиндра 6 6 отходит вправо на величину длины штока 83, обеспечивающую поворот штанги 52 со скалками 58 и 59, рычагами 67 и 68, гидроцилиндром 66 в опорах 6О и 73 на 9О При этом рычаги 53 с толкателями 54займут вертикальное положение. Этот поворот осуществляется гидроцилиндром 65, шток 72 которого, втягиваясь в штоковую полость, поворачивает рычаги 70 и коромысло 74 на угол 9О до ограничителя 77.
После окончания поворота вновь подается команда электроавтоматики на гидравлический привод, и штоком гидроцилицдра 66 штанга 52 с рычагами 53 перемещается в крайнее правое положение, поворачивается под действием гидроцилиндра 65 на 9О°{в противоположном предьщущему повороту направлении) и занимает исходное положение. С целью снижения величины ускорения в момент начала передвижения бочек, для предотвращения выплеска жидкости из незакрытой горловины заполненной бочки, кулачок 55 закрепленный на штанге 52 у второго по ходу перемещения рычага 53, воздействует на рычаг 56, прикрывая сечение регулируемого дросселя 57, поэтому скорость поступления масла в гидроцилиндр 66 минимальная.
По мере движения штанги 52 влево рычаг 56 опускается по скосу кулачка и постепенно открывает сечение дросселя 57, увеличивая скорость поступления масла в гидрошшиндр. На подходе к другому крайнему положению на дроссельный механизм воздействует кулачок, расположенный на штанге 52 у первого рычага 53 и имеющий скос в другую сторону, который постепенно уменьшает скорость движения бочек до полной их остановки.
Бочка, передвинутая описанным выше способом из первой позиции во вторую попадает на вращающуюся платформу механизма 4 для ориентирования бочек по положению пробки. Оператор, находящийся на платформе 15 поворачивает водило 6 относительно скалки 32 в любое удобное для него положение для ориентирования бочки и отвинчивания ее пробки. При этом прекращается взаимодействие магнита 8 и магнитоуправляемого контакта 39, что вызывает команду электроавтоматики, управляющей приводами пщропилицдра 133 и гидромотора 139. Давление, поступившее в поршневую полость гидроци- лшздра 133, вьщвигает шток 136, который поворачивает рычаг 137 и поднимает роликами 138, входящими в паз 13О, ступицу 129 с диском 128. Движение диска 128 вызывает передвижение тяг 127 в сторону периферии платформы 13 и воздействует на четыре зажима 14, которые сцентрируют бочку относительно центра вращения платформы 13 и прочно зафиксируют на ней бочку.
Одновременно с этим с помощью гидромотора 139 платформа 13 с бочкой через передачу шестерен 14О, 143 и 144 начнет поворачиваться по часовой стрелке. В тот момент, когда горловина с 1фобкой бочки будет проходить мимо насадка 7, оператор, нажимая педаль 152, тормозит ход
платформы 13, и она останавливается, а гидромотор 139 продолжает работать, осуществляя проскальзывание шестерни 14О относительно шестерни 143 посредством фрикционной шайбы 141. Оператор нажимает кнопку 48. В результате этого обойма 47 выводит фиксатор 45 из проточки 46, и вал 5 опускается. После чего оператор вводит с помощью рукояток 49 насадок 7 в нишу пробки, освобождает педаль 15О, и платформа 13 с бочкой и водилом 6 продолжает свое вращение до того момента, пока магнит не воздействует на магнктоуправляемый контакт 39, затем вращение гидромотора 139 прекращается, и бочка останавливается в строго заданном месте. После остановки платформы 13 оператор нажимает на пульте управления 151 электрокоманды для соединения приводного вала 25 устройства для отвинчивания с валом 5, и в поршневую полость гидроцилиндра 31 поступает давление, скалка 32 с прижимом 38 опускается вниз и плотно прижимает бочку к платформе 13, удерживая ее от поворота при отвинчивании тугозавинченной пробки,
0 Вместе со скалкой 32 опускается и воцило 6, при этом фиксатор 45, находящийся в Э1ЧЗТ момент выше проточки 46 у беспрепятственно проходит ее, а магнит 8 хотя и отходит вниз от контакта 39, но воз действие на электроавтоматику не оказывает, так как заблокировгиот команды для соединения приводного вала 25 устройства для отвинчивания с валом насадка 7.
Гидромотор 23, редуктор 24, полумуф0 ты 15 и 16 при опускании скалки 32 также опустятся и, поскольку кольцо 44, удерживающее редуктор 24, опустилось на величину большую, чем расстояние между зубьями 19 и 22 полумуфт 15 и 16, произой5 дет сцепление этих зубьев. Если геометрические оси гидромотор 23. редуктор 24 приводной вал 25 - полумуфта 15 и полумуфта 16 вал 5 - водило 6 - насадок 7 после того как насадок 7 .опущен в нищу
0 пробки бочкиJне совпадают, то сцепление зубьев все равно произойдет, так как центрирующий палеп 18, соприкасаясь с конической поверхностью отверстия 21 посредством плавающего диска 26 сместит полу5 муфту 16 и в конце своего скольжения
войдет в центральное отверстие, а конус 17 в коническое отверстие 21.
По команде электроавтоматики гцдромотор 23, вращаясь через редуктор 24, при0 водной вал 25, лолумуфты 15 н 16. вал 5 и насадок 7, отвернет пробку и автоматически выключится, носле чего все указанные элементы автоматически вернутся в исходное положение, оператор положит пробку рящом с горловиной на бочки, и механизм 12 для перемещения передвинет ее в III позицию. При этом бочка будет жестко зафиксировс1ла рычагами 61 с помощью гщ1роцилиндров 62, воспринимахопщх также силы инерции массы бочки при ее перемещении. После того как бочка передвинута в IV позицию, в поршневую полость цилиндра 62 поступает давление, и рычаг 61 отходит от бочки, освобождая ее, после чего штанга 52 с рычагами 53 с помощью гид- роцилиндра 66 отходит, поворачивается на 9О и перемещается в крайнее правое положение и т.д., как было описано вьшге. Пустая бочка в третьей позиции попадает на рольганг 9О весового дозатора 9. При этом стрелка 91 весового устройства 87 отклонится. На циферблатном указателе 88 с помощью рычага 1О1, связанного с поводком О предварительно устанавливают по шкале циферблата 1О2 нужную дозу налива, для чего ослабляется барашек ЦЗ и, следя за флажком 107 перемещают по окружности лимба 112 рычаг 99, который достигнув нужного деления школы снова закрегошется на лимбе барашком, аналогичным образом устанавливают рычаг 10О с поводком 1О4 и флажком 1О7 на деление шкалы более низкого порядка. Угол шкалы, заключенный между деления ми первой и второй установки, характеризует налив с малой производительностью (тонкий долив), а угол шкалы, заключенный меж ду нулевым делением шкалы, где находится флажок 1О7 поводка ЮЗ, соединенного с лимбом 112 и рьгаагом 99, и делением второй установки.характеризует налив с высокой производительностью. После того как пустая бочка вызовет отклонение стрелки 91 на угол шкалы, характеризующий вес тары, система электроавтоматики подает команду на заполнение маслом поршневой полости цилиндра 111, шток которого 110 через тягу 108 поворачивает рычаг 99 с поводком ЮЗ и лимбом 112 до тех пор, пока магнитоуправляемый контакт 94 (фиг. 11) поводка ЮЗ не достигнет мaniитa 92 стрелки 91. Это вызовет взаимодействие магнита с контактом, и элек троавтоматтга вьгепютит подачу масла в гидроципиндр 111, и вращение лимба 112 с рычагами и магнитоуправляемыми контактами прекратился. Таким образом, вся система установки задатчиков переместится на некоторый угол, характеризующий вес тары. Од- новременно электроавтоматика дает команду на опускание патрубка наливного стояка Ю в горловину бочки, а по достижении им крайнего нижнего положения открывает клапан и включает насос, подающий жидкость в бочку. Стрелка 91 с магнитом 92 по мере налива жидкости в бочку перемещается по шкале циферблата, и, достигнув магнитоуправляемого контакта на поводке 1О4, подает команду на прикрытие клапана наливного патрубка, после чего некоторое вре мя будет производиться тонкий долив жидкости с уменьшенной производительностью, а, дойдя до поводка 1О5, магнит стрелки вьщает команду по прекращению налива, и наливной патрубок автоматически выйдет из горловины бочки. После этого заполненная бочка устройством 12 для передвижения подается на 1У позицию. Оператор вставляет пробку в горловину, и устройство 11 для завинчивания пробок, имеющее, как было указано вьш1е, аналогичную конструкцию с устройством для отвинчивания пробок, повторяет порядок работы, уже описанной ранее, с той лишь разницей, что пробка завинчивается с дозированным моментом, заданным от реле давления в це- пи гидромотора пробковерта. Заполненная жидкостью бочка с завинченной пробкой подается на последнюю, V позицию, здесь кантователь 3, на рольганге 148 которого стоит бочка, перемещает ее в горизонтальное положение, и она скатывается по наклонному пандусу 149. Формула изобретения 1. Линия для расфасовки жидкостей в бочки, состоящая из расположенных по ходу технологического процесса накопителя, отсе- кателя, кантователя, механизма для ориентирования устройств для отвинчивания, наполнения и завинчивания пробок на бочках и механизма для перемещения бочек, отличающаяся тем, что, с целью упрощения конструкции и надежности линии в работе, механизм для ориентирования расположен под устройством для отвинчивания пробок и содержит поворотную относительно вертикального вала платформу с укрепленными на ней по окружности зажимами для крепле- ния бочек, а устройство для отвинчивания пробок содержит смонтированное на вертикальном валу водило с прижимом и укрепленными на нем насадком под пробку, постоянным магнитом и самоцентрирующейся муфтой.
смонтировано с возможностью вертикального и горизонтального перемещений и снабжено хвостовиком и роликами, расположенными на втулке прижима.
fe,
Риг.9
ш
ВиЗ Г
101
ш
10
106
J
А Риг./о 5t 54 63 S4f
Фиг. . 16
