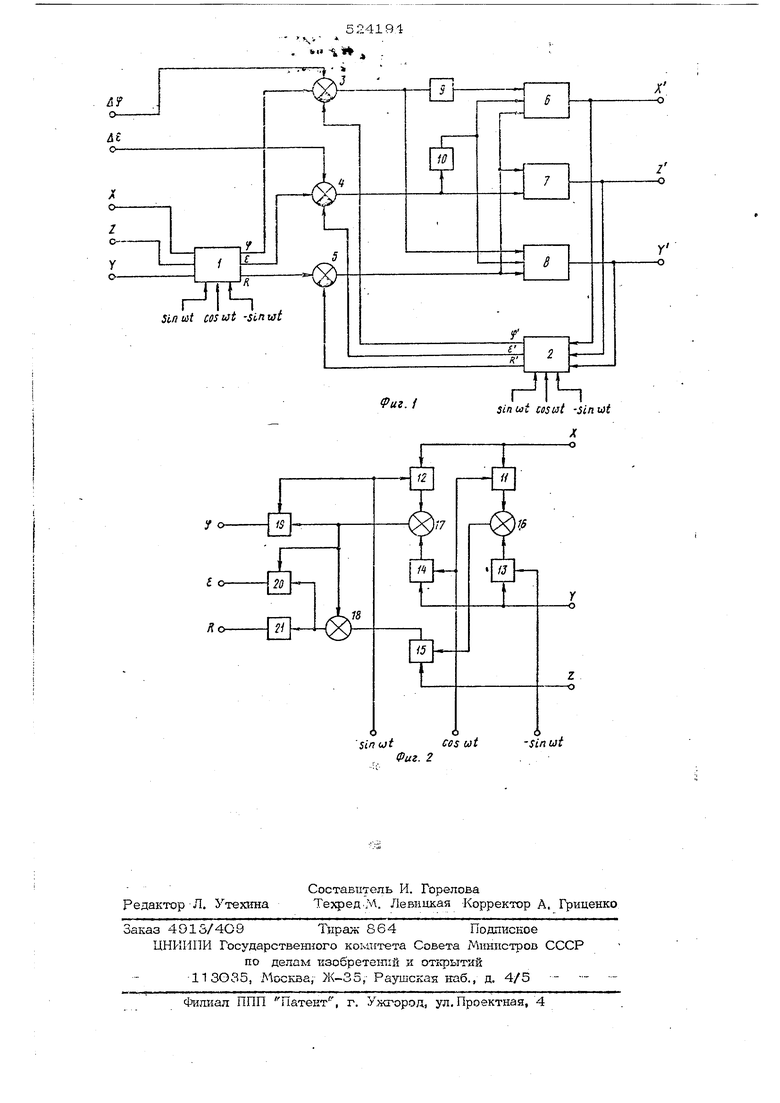
(54) ПРЕОБРАЗОВАТЕЛЬ КООРДИНАТ ТРЕХМЕРНОГО ПРОСТРАНСТВА первого и третьего модуляторов подсоедпне Ш:.т ко входам первого сумматора, выходной ciirnan которого подан на вход опорного напряжения : пятого модулятора, выходы второго и четвертого - к входам второго cjiMM-CiTOpa, выходной стггнал которого подан на вхо.г первого фазового детектора, на вход опормого напряжения второго фазового детектора и на один из в :сдов третьего сумматора, ко второму вхо. ;,;,: рого подключен выход пятого модулятора . Выход третьего сумматора подключен ко входам амплитудного и второго фазового детекторов. Входные клеммы опорных напряжений, сдви11утых одно относительно на 9О соединены с входамиопорных нагфяжений модуляторов и фазового детектора; причем первая из них соединена с входами первого и четвертого модуляторов, вторая - со входами третьего модулятора, а третья - со входами второго модулятора и первого фазового детектора. Сигналы с выходов тудного и фазового детекторов поданы на выходы блока, .. В преобразователе происходят .ромежуточные вычисления сфертиеских координат R , Н , по задаш1ым прямоугольным, изменение углов , на заданную величину Д V и U и переход к прямоуголь ным координатам. Все входные и выходные величины преобразователя ( X, У, 2. , , Д, Х ,у i ) представлены в виде напряжений постоянного тока. На фиг. 1 показана блок-схема преобразователя координат трехмерного пространства; на фиг. 2 - схема блока преобразова11ия прямоугольных координат в сферические. Преобразователь содержит два идентичных блока преобразования прямоугольных координат в сферические 1 и 2, в которы вхо.тные и выходные прямоугольные коорди наты ( X, У, 2 и X, У, Z ) подвергаю ся о ишаковым преобразованиям, сумматоры 3, 4, 5 интегро-сумм1фующие усилители 6 - 8 и инверторы 9 и 1О. Блок преобразования прямоугольных коорД1шат в сферические содержит модуляторы 11 -is. сумматоры 16- 18, фазовы детекторы 19 и 2О и а шлитудный детектор 21. Выходные с игналы, пропоршюнальные координатам X и У, поступают на модуля торы 12, Ни 14, 13 соответственно. Выходные напряжения модуляторов 12 и 1 11 и 13 су1у1мируются. При указанных опорных напряжениях суммарное напряжени модуляторов 12 и 14 равно P-sinCcjD t ) f.r.tapHoe напряжешь модуг.я.торов 11 1г -V-COSCUD-t-«-4), Ч arfetg где г Напряжение Г-со&(ч)1+)поступает на одулятор 15 в качестве опорного. Вели1ша Т изменяется с изменением X и У, а а выходе MO-fv--opa 15 необходимо полу-iiTb напряжетпю, не зависящее от амплитуды порного. Эта задача может быть решена несколькими путями: например, включением в цепь опорного напряжется усилителя ограничителя и фильтра, включением в цепь опорного напряжения с глубокой I регулировкой усиления и выполнением схемьз мод571ятора 15 таким образом, чтобы он был некритичен к изменению опорного нагтряжения. Таким образом, существует ряд способов стабилизащги a cтаитyды опорного напряжеш я (для модулятора 15) и выбор одного из них опрег дв-г.:..: конкретной конструктивной проработкой, преобразователя к не существенен для его принципа действия. Связь межщ модуляторами 11, 13 и 15, пока.затшая на фиг. 2, отражает только принципиальную сторону взаимодействия между этикта элементами, т.е. что модуляция I велич15ны происхош т в фазе с сигналом I cob(uji «- Ч) . . При этом на выходе модулятора 15 получен сигнал. СоаСш-Ь+ф}. Этот сигнал суммируется с напряжением sin ( + Ч ,) , и в результате полушется напряжение R S i-п ( If-fc-t vp-V е), 2. 2. 2. t агсЪ§ л - +i , Таким образом, в результате описанных .преобразований получаем два напряжения l-Si-n Cuu-t )и R-sinCtut+f ). Первое КЗ этих напряжений,поступает на фазовый детектор 19, опорным для которого является напряжение Sin lot .На выходе детектора 19 получаем напряжение, пропорциональное углу f (азимут). Напряжение T -si-n (out ) поступает на амплитудный детектор 21 и фазовый детек1х р 2О, у которого-опорным напряжением является binCa)t + 4)- На выходе амплитудного детектора напряжение пропорциально R , а на выходе фазового детектора - углу 8. (угол места ). После преобразования выходных величин X, У и 2. получаем соответственно значения R i Y, - Полученные величины сферических координат ( У, S,K)f, ) поступают на входы усилителей 6-8, где они cJмм фyютcя с определе1шыми знаками. На те же входы усилителей поданы входные сигналыдТи Д, TipDHopUHOHanbHbTe углам -i поворота системы координат в горизонтальной ( Д Ч ) и вертикалы1ой( л ) ПЛОСКОС11Я.С.: Выбранное на фиг. 1 правтшо знаков обеспечивает устойчивость всей многоконтурной системы и ос тцествление заданных преобразований координат. Обозначим С P -1- д. Ч) - Ч ,(t + t) Т г., - R-Rr. интегро-суммтфующих усилителей, сигналы r,nouM на выходы устройства. jriil д. NM J - W -с которых поданы на выходы отличающийся тем, что, с целью Если считать операционные усилители идеальными { о . о . дрейф равен нулю), то,пока все усилители находятся в линейной зоне, должны ньгаолняться следующие соотношения: на входе усилителя 6: , - S, ч-д на входе усилителя 7: (S - -ц на входе усилителя 8: (, ; d о Эти соотношения могут одновременно вьгаолняться при единственном условии ..-V°Следовательно, получаем +ДЧ; , ; Т.е. величины R, и , соответствую с одной стороны, прямоугольным координатам X, У и 1. , полученным на выходе преобразователя, к, с другой стороны, рав соответствующим сферическим координатам полученным из входных величин X, V и Z с учетом поворота системы координат на угол Д в горизонтальной плоскости, к на угол Д в вертикальной плоскости. Следует отметить, что добавление к углам Y и углов Д Ч и Д & физически соответствует повороту вектора в неподвижной системе координат. Поэтому дл того, чтобы имитировать поворот системы координат относительно неподвижного вект IP- - -.„ , углылЧ и л t должны быть взят с обратными знаками по отношению к угл поворота системы координат. . ;Таким образом, новые коор динаты X, У t соответствуют исходным координатам X, У и t после поворота системы координат на yrtoi д Ф , д Формула изобретени 1. Преобразователь координат трехмерног тфостранства, содержащий по числу преоб разуемых координат три интегро-суммиру щих усилителя и три сумматора, ггавертор |.и включенный в цепь отрицательной обрат ной связи преобразователя блок преобраз вания тчонмоугольных косрдмнат в- сйериче кце, входы которого соединены с выходам асширения класса решаемых задач, он содержит второй блок преобразования прямоугольных координат в сфертгческие, входы которого подключены к входам устройства, выходы блоков преобразования пряпу1оугольных координат в сферические подключены попарно к первым и вторым входам соответтвующих трех сумматоров, третьи входы сумматоров угловых координат соединены с входами задания углов поворота координат; выход первого сумматора подключен ко входу первого интегро-суммирующего усилителя, через инвертор и к входу третье:Го непосредственно, выход второго сумматора - ко входам первого и третьего интегросуммирующих усилителей через инвертор и ко входу второго непосредственно, а выход третьего сумматора - ко входам трех ин т егро-суммирующих усилителей непосредственно. 2, Преобразователь по п. 1, отличающийся тем, что блок преобразования прямоугольных координат в сферические выполнен трехканальным и содерлшт пять модуляторов, три сумматора, амплитудный и два фазовых детектора/ причем для подачи модулирующих напряжений входы первого и второго модуляторов соединены между собой и подключены к первому входу блока, входы третьего и четвертого модуляторов также соединены и подключены к второму входу а вход пятого модулятора - к третьему входу блока; выходы первого и третьего модуляторов подсоединены ко входам первого сумматора, выходной сигнал которого подан на вход опорного напряжения пятого модулятора, выходы второго и четвертого модуляторов подсоединены к входам второго сумматора, выходной сигнал которого подан на вход первого фазового детектора, на вход опорного напряжения второго фазового детектора и на од1Ш из входов третьего сумматора, ко второму входу которого подключен выход пятого модулятора; выход третьего сумматора подключен ко входам амплитудного и второго фазового детекторов; входные клеммы опорных напряжений, сдвинутых одно относительно другого на 90°, соединены с входами опорных напряжешгй модуляторов и фазового детектора: причем первая из них соединена со .входами первого и четвертого модуляторов, вторая - со вхо м третьего модулятора, а третья - со входами второго модулятора и первого фазового детектора; сигналы с выходов амплитудного и фазового детекторов поданы на Бь:ходы блока
sin tat COSul -Sin t
| название | год | авторы | номер документа |
|---|---|---|---|
| Преобразователь координат 4-х мерного пространства | 1973 |
|
SU477427A1 |
| Устройство для преобразования полярных координат в прямоугольные | 1972 |
|
SU441572A1 |
| Устройство для считывания гра-фичЕСКОй иНфОРМАции | 1978 |
|
SU805368A1 |
| Устройство для измерения параметров резонансных контуров | 1982 |
|
SU1071972A1 |
| Устройство для считывания графической информации | 1985 |
|
SU1330646A1 |
| СПОСОБ СОПРОВОЖДЕНИЯ ЦЕЛИ МОНОИМПУЛЬСНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИЕЙ | 1997 |
|
RU2117960C1 |
| КОМПЬЮТЕРНАЯ СИСТЕМА УПРАВЛЕНИЯ СТРОИТЕЛЬНЫМ КОМПЛЕКСОМ | 2016 |
|
RU2615025C1 |
| Устройство для преобразования координат на плоскости | 1978 |
|
SU748441A1 |
| Система автоматизированного управления строительным комплексом | 2018 |
|
RU2696064C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 1996 |
|
RU2099739C1 |
О
sinijtcas ut-sinut
Фиг. 2.
