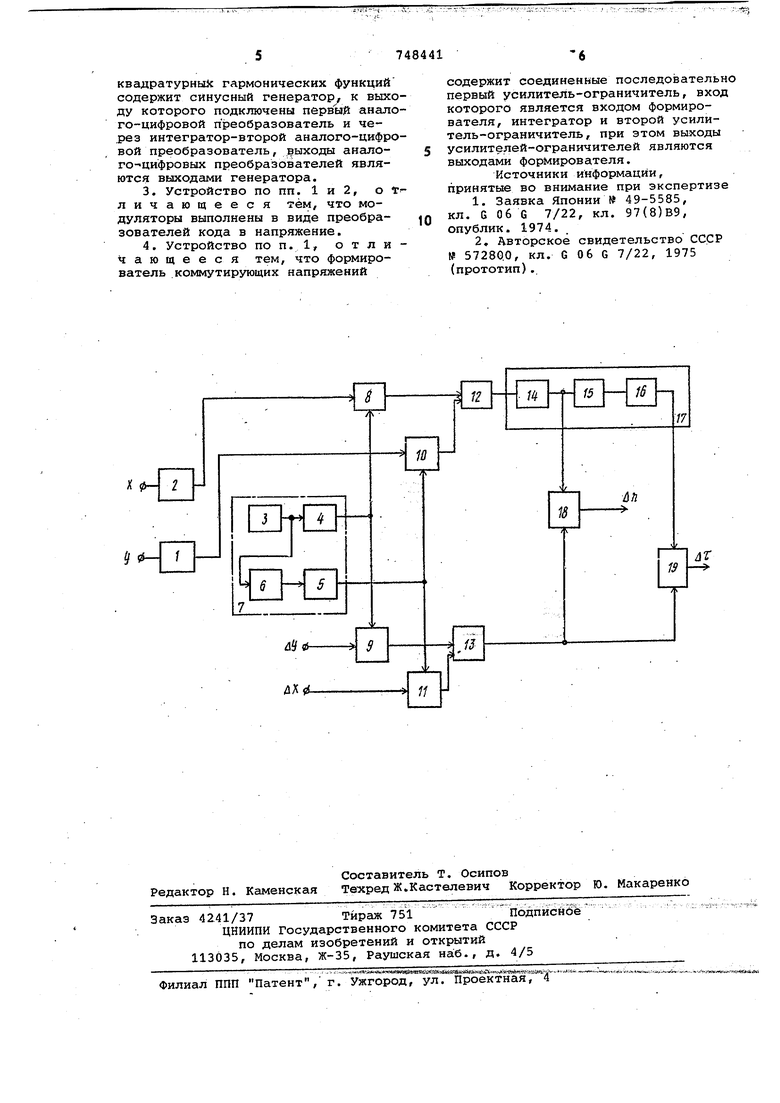
вующим .выходам формирователя коммути рующих напряжений, а управляющие вхо ды модуляторов подключены к соответс вующим выходам генератора квадратурных гармонических функций, дополнительно содержит второй сумматор, под ключенные к его входам третий и четвертый модуляторы, и два дифференциа тора, входы которых подключены к шинам задания координат направляющего вектора, а выходы - к входам соответственно третьего и четвертого модуляторов, управляющие входы которых соединены с соответствующими выходам генератора квадратурных гармонических функций, авыход вторрго сумматора соединед с входом формирователя коммутирующих напряжений. При этом генератор квадратурных гармонических функций содержит синусный ген ратор, к выходу которого подключены первый аналого-цифровой преобразователь.и через интегратор- второй анал го-цифровой преобразователь, выходы аналого-цифровых преобразователей являются выходами генератора, при этом модуляторы выполнены в виде преобразователей кода в напряжение, а формирователь коммутирующих напряжений содержит соединенные последовательно -первый усилитель-ограничитель, вход которого является вхо дом формирователя, и нтегратор и второй усилитель-ограничитель, при этом выходы усилителей-ограничителей являются выходами формирователя. Устройство, блок-схема которого представлена на чертеже, содержит дифференциаторы 1, 2, синусный генератор 3, аналого-цифровые преобразователи 4, 5, интегратор 6, генератор 7 квадратурных гармонических функций, модуляторы 8-11, сумматоры 12, 13, усилитель-ограничитель 14, интегратор 15, усилитель-ограничитель 16, формирователь 17 коммутирующих напряжений, фазовые детекто 18 и 19. Устройство работает следующим образом. Преобразуемые координаты ЛХ. и &V поступают на входы модуляторов 9 и 11, которые запитаны переменными сигналами, поступающими с выхода генератора 7 и изменяющимися по закону синуса и косинуса. На выходе . сумматора 13 образуется гармоническое напряжение, фаза и амплитуда ко орбго соответствуют аргуме.нту и модулю вектора преобразуемых координат . Это напряжение поступает на входы фазовых детекторов 18, 19. Фаза коммутирующих напряжений, поступающих на управляющие входы фазовых детекторов, ойределяется требуемым углом поворота координат. , Она вычисляется следукшдим образом. Текущие координаты X / V начала преобразуемого вектора задают траек
748441 ;торию его перемещения на плоскости. Задача состоит в том, чтобы пересчитать заданные координаты дх и д У к направлению касательной к траектории, или, другими словами, повернуть на угол наклона касательной. В соответствии с этим текущие координаты Я , у , определяющие точку на траектории, дифференцируются, а затем с помощью модуляторов 8, 10 и сумматора 12 определяется угол поворота, характеризуе;мый фазой суммарного гармонического напряжения. С помощью формирователя 17 вырабатываются два квадратурных коммутирующих напряжения, поступающих на управляющие входы детекторов 18 и 19. На их выходах вырабатываются сигналы, соответствующие тангенциальной и нормальной относительно траектории составляющим преобразуемого вектора. Повышение быстродействия устройства обусловлено отсутствием в блоксхеме инерционных элементов. Технико-экономический эффект от использования изобретения обусловлен также возможностью расширения класса решаемых задач, связанных преобразованием координат. Формула изобретения i. Устройство для преобразования координат на плоскости, содержащее первый сумматор, входы которого че-. рез первый и втарой модуляторы связаны с соответствующими шинами задания прямоугольных составляющих,выход первого сумматора связан с входгши первого и второго фазовых детекторов, управляющие входы которых подключены к соответствующим выходам формирователя коммутирующих напряжений,а управляющие входы модуляторов подключены к соответствующим выходам генератора квадратурньзх гармонических функций, отличающееся тем,что, с целью повышения быстродействия и расширения области применения устройства при задании угла поворота координат изменением opq oгoнaльныx составляющих направляющего вектора, устройство дополнительно содержит втЬрой сумматор,подключенные к его входам третий и четвертый модуляторы,и два дифференциатора, входы которых подключены к шинам задания координат направляющего вектора, а выходы - к входам соответственно третьего и четвертого модуляторов, управляющие входы которых соединены с соответствующими выходами генератора квадратурных гармонических функций, а выход второго сумматора соединен с входом формирователя коммутирующих напряжений, 2, Устройство по п. 1, о т л и чающееся тем, что генератор
квадратурных гармонических функций содержит синусный генератор, к выходу которого подключены первый аналого-цифровой преобразователь и через интегратор-второй аналого-цифровой преобразователь , выходы аналого-цифровых преобразователей являются выходами генератора.
3.Устройство по пп. 1 и 2, отличающееся тем, что модуляторы выполнены в виде преобразователей кода в напряжение,
4.Устройство ПОП.1 отличающееся тем, что формирователь коммутирующих напряжений
содержит соединенные последовательно первый усилитель-ограничитель, вход которого является входом формирователя, интегратор и второй усилитель-ограничитель, при этом выходы усилителей-ограничителей являются выходами формирователя.
Источники информации, принятые во внимание при экспертизе
1.Заявка Японии № 49-5585, кл. G 06 G 7/22, кл. 97(8)В9, опублик. 1974.
2,Авторское свидетельство СССР № 57280.0, кл. G Об G 7/22, 1975 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для преобразования координат вектора | 1975 |
|
SU572800A1 |
| ЦИФРОВАЯ СИСТЕМА СЕЛЕКЦИИ ДВИЖУЩИХСЯ ЦЕЛЕЙ | 1995 |
|
RU2087006C1 |
| СИНТЕЗАТОР ЧАСТОТНО-МОДУЛИРОВАННЫХ СИГНАЛОВ | 2011 |
|
RU2449462C1 |
| Преобразователь сферических координат в декартовые | 1976 |
|
SU634303A1 |
| БЫСТРОДЕЙСТВУЮЩИЙ МНОГОФУНКЦИОНАЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА В КОД ДЛЯ УСТРОЙСТВ ЭЛЕКТРОМЕХАНОТРОНИКИ | 1994 |
|
RU2094945C1 |
| ПРИЕМНИК АППАРАТУРЫ ПОТРЕБИТЕЛЕЙ СИГНАЛОВ ГЛОБАЛЬНЫХ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 1994 |
|
RU2067770C1 |
| УСТРОЙСТВО ДЛЯ ТРИГОНОМЕТРИЧЕСКОГО ПРЕОБРАЗОВАНИЯ | 1992 |
|
RU2039377C1 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 2020 |
|
RU2759511C1 |
| Устройство измерения зенитного угла для телеметрической системы | 1982 |
|
SU1054538A1 |
| УПРАВЛЯЮЩИЙ АППАРАТНО-ПРОГРАММНЫЙ КОМПЛЕКС ДЛЯ ОБРАБОТКИ РАДИОЛОКАЦИОННОЙ ИНФОРМАЦИИ | 2001 |
|
RU2222028C2 |
