1
Предлагаемое устройство относится к области вычислительной техники.
Известны устройства для преобразования координат, содержащие интегрирующие усилители, инверторы и сумматоры. ,
Известные ycTipo cTiBa не обеспечивают преобразования прямоугольных координат в гиперсферические.;
Предлагаемое устройство отличается от изве(стных тем, что в него в.ведены блоки преобразования прямоугольных координат в гиперсферические, входы одного; из которых подключены ко входам координат преобразователя, а входы другого - к выходам преобразователя. Выходы блоков преобразования прямоугольных координат в гиперсферические подключены попарно ко входам соответствующих четырех сумматоров, оставшиеся входы трех сумматоров соединены со входами задания углов поворота преобразователя. Выход первого сумматора подключен к первому интегрирующему усилителю через первый инвертор, а ко второму интегрирующему усилителю - непосредствеппо.
Выход второго сумматора подключен к первому и второму интегрирующим усилителям через второй инвертор, а к третьему интегрирующему усилителю--непосредственно. Выход третьего сумматора соединен с перыми тремя интегрирующими усилителями ерез третий инвертор, а с четвертым-непоредственно, выход четвертого сумматора подключен к четырем интегрирующим усилптелям, выходы которых соединены с соответствующими выходами преобразователя.
Блок преобразования прямоугольных координат в гиперсферические выполнен четырехканальным и содержит модуляторы, включенные на входах блока. Выходы модуляторов через соответствующие сумматоры подключены к фазовым детекторам, соединенным с выходами блока. Выход модулятора последнего канала подключен также через блок
умножения к первому амплитудному детектору, соединенному с соответствующим выходом блока преобразования прямоугольпых координат в гиперсферические.
Другой вход блока умножения через интегратор подключен к выходу соответствующего сумматора, входы которого соединены со входом модулятора последнего канала и с выходом второго амплитудного детектора.
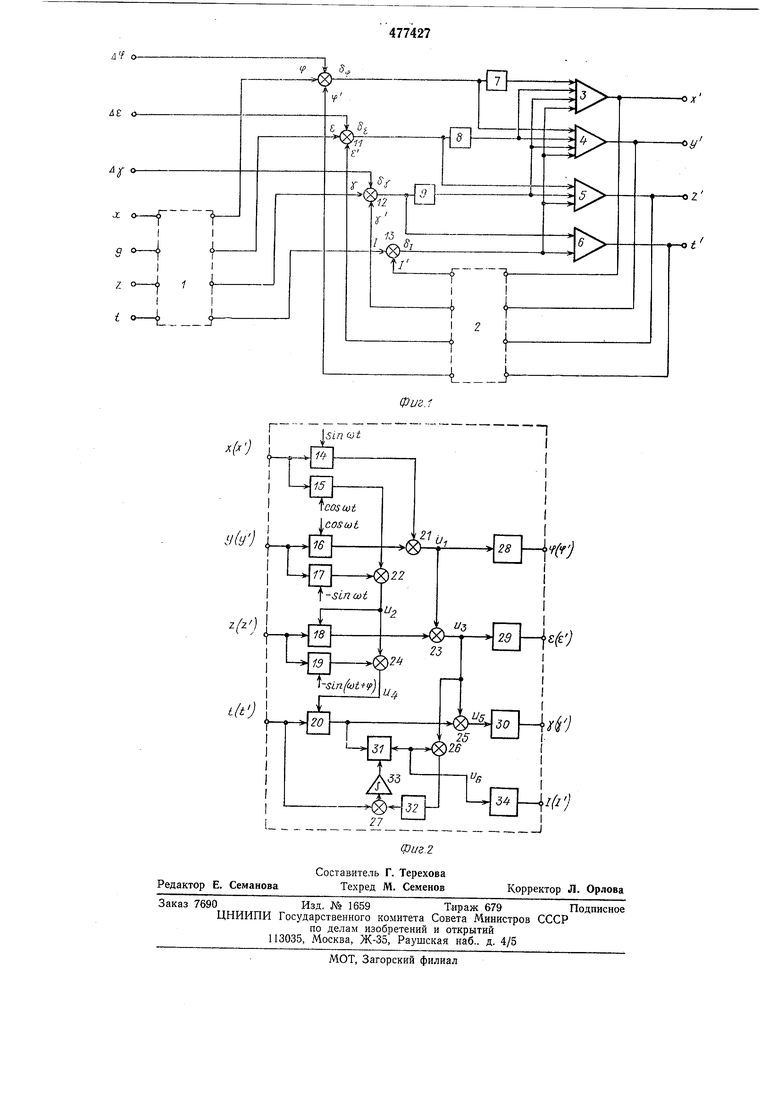
Предлагаемое устройство осуществляет преобразование координат х, у, z, t при поворотах системы координат на произвольные угла Аф, Ае и Ду при сохранении инвариантным интервала, определяемого соотнощением:I yt -x2-y2 Y(t(x(yy-(zy, где. Xi , xl - координаты точки в исходной и повернутой системах координат. Координатные направления х, у, z, t приняты ортогональными, а скорость света с - равной единице. Все входные и выходные величины нреобразователя (х; , х , Дф, Де, AY) представлены в виде напряжении постоянного тока. На фиг. 1 приведена полная блок-схема преобразователя; на фиг. 2-блок-схема вспомогательного преобразователя. Предлагаемое устройство состоит из двух одинаковых вспомогательных преобразователей 1 и 2, осуществляющих перевод прямоугольных координат X, у, Z, Z в гиперсферические координаты ф, е, у, I, системы из четырех операционных усилителей 3-6, охваченных перекрестными отрицательными обратными связями, трех инверторов 7-9 и четырех сумматоров 1013. Работа преобразователя рассматривается в следующей последовательности: вычисление координат ф, 8, Y. I и введение перекрестных образных связей, обеспечивающих получение нулевых ошибок 11реобразования координат. Учитывая условие прямоугольности исходных координат X, у, z, t, для угловых координат ф, е, :у могут быть написаны соотношения:Ф aгctg-: e arctg -; Y arctg Диапазон изменения угловых координат ограничен значениями: . (последнее условие означает, что рассматриваемая точка должна находиться внутри «Свето1вого конуса). Для вычисления угловых координат используется .модуляция постоянных напряжений, пропорциональных прямоугольным координатам, двумя сдвинутыми на 90° синусоидальными нанряжениями с последующим . фазовым детектированием суммы этих напряжений при опорном напряжении, совпадающем по фазе с одним из модулирующих. Для определения одного угла (ф) модулирующие напряжения (например, sinco н созш/) могут быть получены вне преобразователя. Для определения остальных углов нодулирующие напряжения вырабатываются в самом преобразователе, так как при этом необходимо получить квадратурные составляющие, «плавающие по фазе относительно внещнего онорного напряжения (относительно sincu). Для получения таких составляющих напряжения, пропорциональные, например, координатам х v. у, необходимо промодулировать сигналами sincoi, cosco, - -sinco и затем просуммировать. При этом получаются напряжения (.vsinco -fz/cosco) и (.VCoscoif-r/-sinroO пропорциональные соответственно Л sin (со/+(р) и Л-cos (й)-|-ф), где Л г/2, 9 arctg- . Эти напряжения используются для определения угла ф и для модулядии в квадратуре следующих координат. Вычисление инварианта осуществляется решением прямоугольного треугольника где . К входным .клеммам Преобразователя х, у, z (х , у , z) подключено по два модулятора, осуществляющих модуляцию постоянных напряжений, подключенных к этим клеммам. в квадратуре, Модуляторы 14-17 получают опорные напряжения извне (из блока питания, например). Для модуляторов 18-20 опорные напряжения вырабатываются в самом преобразователе. Для этих целей служат модуляторы 15, 17 и19, которые являются вспомогательными. Модуляторы 14, 16, 18 и 20 являются основными, их выходные напряжения непосредственно используются для определения углов ф, е, у. К входной клемме t (f) подключен один модулятор 20. Выходные напряжения тех и других модуляторов последовательно суммируются между собой на сумматорах 21-27. В результате суммирования получаются следующие напряжения: Ui - x-sin&t + ycosK)f Y х + У 81п(сО/ + ф), W2 .r-cosco/ + i/sinco./ - Y х у С05(й) + ф), + ((i)) -{-г-со5(а)/ + ф) У д;2 + г/2+г2.51п (со + ф + в), u ( ф)-г-з{п(ш + ф) : |/д:2 + г/2 + 22.СОЗ((й + ф-|-8), 5 У Ч +228 п(со/+ф + е)+ ((oi + ф + 8) 1/л;24-г/2 + .sin(o)/ + ф-f 8-fY)Напряжения MI, «3, 5 поступают на фазовые детекторы 28-30, соответственно. Опорными напряжениями для фазовых детекторов являются напряжения, совпадающие по фазе с sinco, (), sin(«)-f ф + е). При этом на выходе фазовых детекторов 28-30 будут получены напряжения, среднее значение которых пропорционально углам ф, 8, у (ф, 8, Y) и удовлетворяет соотношениям (2). Для вычисления инварианта I используется замкнутая следящая система, состоящая из блока умножения 31, амплитудного детектоpa 32 и операционного усилителя 33, включенного интегратором (см. фиг. 2). Если обозначить коэффициент передачи блока умножения 31 через X, то на входе а:м(плит(удного детектора 32 напряжение равно:
и K-t-cos (и + ф + е) + «5 K-f-cos ((j) + e). + R- sin (&t + f + &} (:co;+9).
Ha выходе амплитудного детектора 32 напряжение (его среднее значение) будет пропорционально 1/ . Это напряжение вычитается на входе операционного усилителя 33 из постоянного напряжения, пропорционального координате t, и полученная разность, усиленная усилителем 33, поступает на блок умножения 31, замыкая тем самым цепь отрицательной обратной связи. При достаточно большом коэффициенте усиления, реализованном на операционном усилителе 33, будем иметь:
t + R ши K-t l, ).
Таким образом, амплитуда переменного напряжения на выходе блока умножения 31 (K-t) пропорциональна инварианту, определяемому соотношением (1). Это напряжение поступает на вход амплитудного детектора 34, на выходе .которого среднее значение напряжения пропорционально I.
Выходные величины вспомогательных преобразователей ф, Б, Y. I (ф,е , Y. 1) вместе с заданными углами поворота системы координат Аф, Ае И AY поступают на операционные усилители (интеграторы) 3-6.
Учитывая, что скорость изменения координат ограничены величиной скорости света и что коэффициенты усиления интеграторов 3-6 .могут быть выбраны до1статочно большими, можно в первом приближении пренебречь динамическими ошибками преобразователя. Статические ошибки определяются качеством элементов и могут быть в принципе сделаны сколь угодно малыми
6.J ф + Аф - ф, б. е + Ае-е,
б. Y+AY-v, б, i-г,
где бщ , бе , б -, , б J - ошибки преобразования координат.
Тогда на каждом интеграторе 3-6, если ни один из них не вошел в насыщение, сумма всех входных напряжений должна равняться нулю. В этом случае ошибки преобразователя должны удовлетворять (при указанных на фиг. 1 знаках) следующей системе уравнений:
- б., + б, О
б,
-б. -f б, О бе
-б. Ч- б, 0 6,
-f б-, -Ь б, О
Эта система уравнений имеет единственное решение:
б. б, б. б, 0.
Таким образом, на выходе преобразователя получается совокупность четырех величин х , у , z и t, представляющих собой координаты некоторого события после поворота системы координат на произвольные углы Аф, Ав и AY.
Предмет изобретения
1.преобразователь координат четырех-мерного пространства, содержащий интегрирующие усилители, инверторы и сумматоры, отличающийся тем, что, с целью расширения класса решаемых задач, в него введены блоки преобразования прямоугольных координат в гиперсферические, входы одного из которых подключены ко входам координат преобразователя, а входы другого - к выходам преобразователя, выходы блоков преобразования прямоугольных координат в гиперсферические подключены попарно к первым и вторым входам соответствующих четырех сумматоров, третьи входы трех сумматоров соединены со входами задания углов поворота преобразователя, выход первого сумматора подключен к первому интегрирующему усилителю через первый инвертор, а ко второму
интегрирующему усилителю - непосредственно, выход второго сумматора подключен к первому и второму интегрирующим усилителям через второй инвертор, а к третьему интегрирующему усилителю - непосреДСтвенно, выход третьего сумматора, соединен с первыми тремя интегрирующими усилителями через третий инвертор, а с четвертым-непосредственно, выход четвертого сумматора подключен к четырем интегрирующим усилителям, выходы которых соединены с соответствующими выходами преобразователя.
2.Преобразователь по п. 1, отличающийся тем, что блок преобразования прямоугольных координат в гиперсферические выполнен
четырехканальным и содержит в каждом канале модуляторы, подключенные ко входам блока, выходы модуляторов через соответствующие сумматоры подключены к фазовым детекторам, соединенным с выходами блока,
выход модулятора последнего канала подключен также через .блок умножения к первому амплитудному детектору этого канала, соединенному с соответствующим выходом блока преобразования прямоугольных координат в гиперсферические, другой вход блока умножения через интегратор подключен к выходу соответ1СТ1вующего оумматора, входы которого соединены со входом модулятора последнего .канала и с выходом второго
амплитудного детектора.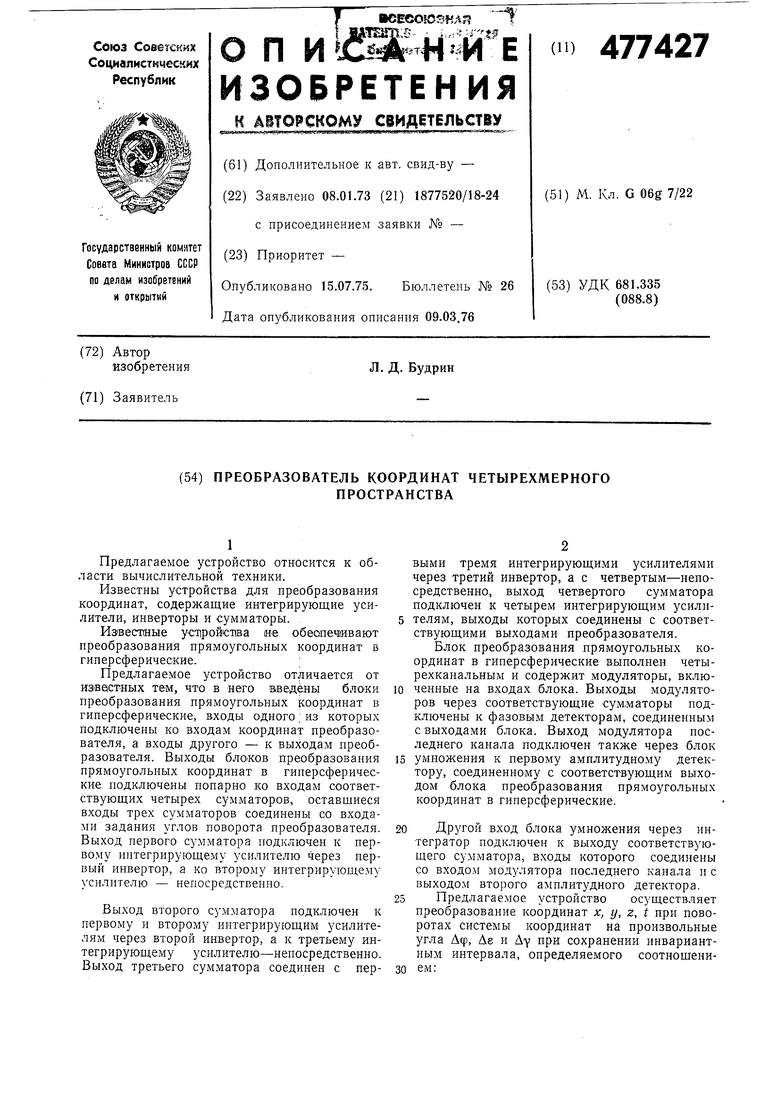

| название | год | авторы | номер документа |
|---|---|---|---|
| Преобразователь координат трехмерного пространства | 1972 |
|
SU524194A1 |
| Устройство для преобразования полярных координат в прямоугольные | 1972 |
|
SU441572A1 |
| Устройство для решения нелинейных алгебраических уравнений | 1988 |
|
SU1539803A1 |
| Устройство для моделирования удара твердых тел | 1988 |
|
SU1567889A2 |
| СПОСОБ ЧАСТОТНОЙ МОДУЛЯЦИИ КОЛЕБАНИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2595638C1 |
| Устройство для автоматической балансировки шлифовальных кругов | 1985 |
|
SU1270596A1 |
| Электропривод с асинхронной машиной | 1971 |
|
SU548220A3 |
| Функциональный генератор | 1980 |
|
SU896637A1 |
| ВИХРЕТОКОВЫЙ ДЕФЕКТОСКОП | 1995 |
|
RU2085932C1 |
| Самонастраивающаяся система регулирования | 1972 |
|
SU448432A1 |