Система работает следующим образом.
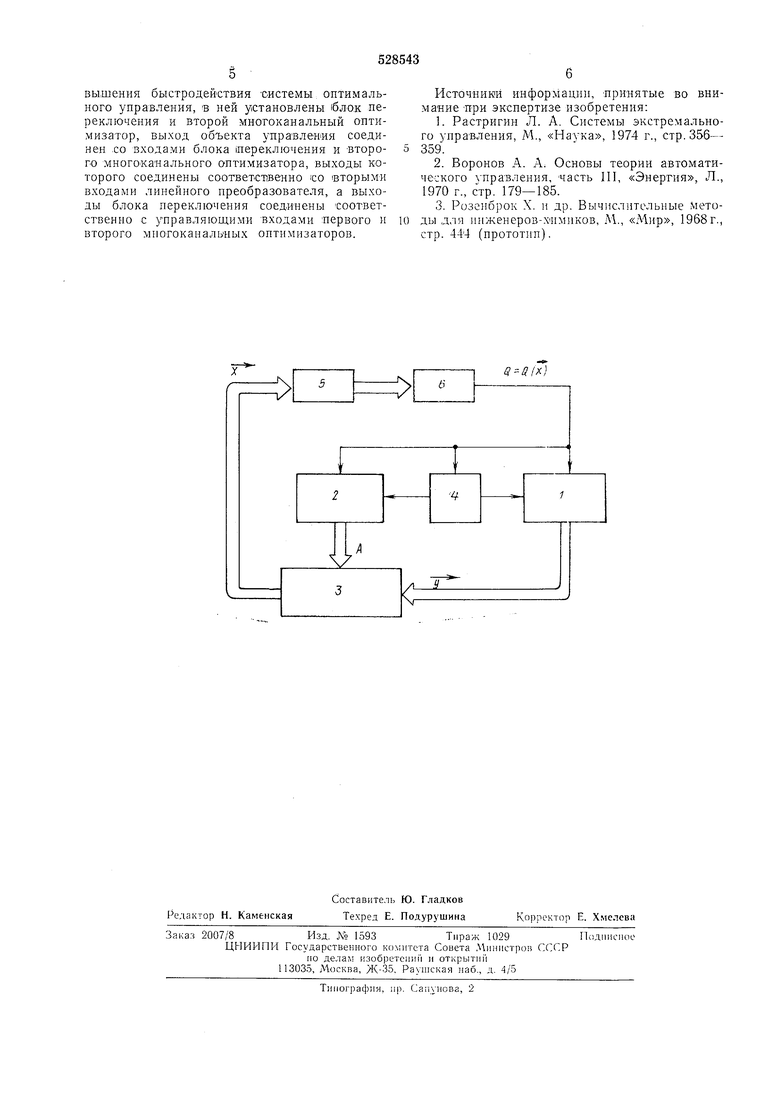
Оптимизатор 1 вырабатывает значения первых вспомогательных переменных г/, (i 1,2,... п), которые затем .подаются соответственно на первые входы линейного преобразователя 3. Поскольку система оптимального управления является многоканальной, то совокупность независимых переменных объектов управления Xj, где г 1,.., п и совокупность вспомогательных неременных //,-, где i il,.., п, удобтю записать в векторном видел: и усоответственно.
В ;1инейном преобразователе 3 осуи1.ествляется преобразование вектора дополнительных пере.меииых у, таким образом, чтобы получить такое значение вектора х, которое приведет к наилучшему изменению показателя качества Q объекта управления 6. Это линейное иреобразоваиие .представляет собой операцию умножения матрицы {/1} на вектор первых дополнительных переменных у и. следовательно, является операцией поворота пмерной системы координат вектора первых доп().1ннте; ьных переменных у.
Элементы матрицы {.4} представляют собой вторые дополнительные переменные, которые вырабатываются в оптимизаторе 2 и являются его выходными сигналами. Ввиду того, что размерность :матрицы {А} линейного преобразования /1-мсрного вектора у равна п У(, п, то число выходов оптимизатора 2 равно п. Быстрый рост этой величины с ростом размерности независимых переменных объекта управления 6 определяет выбор алгоритма оптимизации оптимизатора 2 как алгоритма случайпого ноиска, который обладает наивысшей скоростью поиска экстремума объектов управления большой размерности по сравнению с регулярными алгоритма.ми оптимизации.
Особенность линейного преобразования, осуществляемого с помощью матрипы вторых дополнительных переменных, вырабатываемых оптимизатором 2, заключается в том, что при повороте вектора дополнительных переменных у одновременно изменяются у1ЛЬ между координатными векторами и их маспггабы. Это нрн15одит к из.мепению вектора х независимых переменных объекта управления 6 за счет изменения матрицы {А} линейного преобразования даже при отключенном оптимизаторе 1, т. е. при отсутствии изменений вектора у. В последнем случае система реализует «матричный нонск, в то время как ири наличии изменения вектора у оптимизатором в системе реализуется «матрично -векторный поиск.
Блок переключения 4 управляет работой оптимизаторов 1 и 2 следующим образом. Сначала включается оптимизатор 2. Он работает до тех пор, noiKa не будет найдено значение вектора пезависимых переменных объекта уппраг леиия х, при котором показатель качества объекта управления улучшается по сравнению с ис.ходиым его значением (для определенности, в случае поиска минимума
Q (х) Q (АО). В этот момеит найденная матрица {Л} фиксируется в линейиом преобразователе 3, блок переключения 4 отключает оптимизатор 2 и подключает оптимизатор 1. Оптимизатор 1 оеущеетвляет дальнейшее улучшение показателя качества Q объекта уиравления, изменяя вектор у. В этот момент, когда показатель качества объекта управления начнет ухудшаться, блок переключения 4 отключает оптимизатор 1 и вповь включает оптимизатор 2, который начинает поиск иовой системы координат переменных оптимизируемого объекта (т. е. осуществляется матричный поиск).
Возможен другой режим работы блока переключения 4 и, следовательно, веей системы оптимального управления - рсжпм парных пробных двпжеиий. В этом режиме па каждом шаге иоиска включается вначале оптимизатор 2 (опти.мизатор 1 отключен) и генерируется поисковый вектор Xi, для .которого фиксируется показатель качества Q(;i), а зате.м включается оптимпзатор 1 (оптимизатор 2 отключен, т. е. матрица {/4} фиксирована), генерируется поисковый вектор Х2 н фи ксируется показатель качества Q (л;2). Если одно из пробных движений привело к улучшению показателя качества Q, то производится рабочее движение в иайденпом направлении соответствующим оптимизатором, еслп оба - то работает наилучший оптимизатор. После окончания движения переходят к следующему шагу поиска.
Использование второго миогоканального оптимизатора и блока переключения в системе позволяет упростить операа ии определения значепий элементов матрицы линейного преобразования переменных объекта управ-ления.
В предлагаемой системе производится меиь1пее iio сравнению с известным число измерений показателя качества объекта и тем самым повышается ее быстродействие.
Модельные исследования иоказали, что быстроде.йсгвие предлагаемой миогоканальной системы онтимального управления выше, чем у известиых систем оптимального управлеиия, ра|ботающих по методам наискорейщего спуска, Гауса-Зайдена, Розенброна, особенно на начальном этапе оптимизации.
Форм у л а и 3 о i6 р е т е п и я
Многоканальная система оптимального управления, содержащая первый многоканальный оптимизатор, вхад которого соединен с
выходом объекта управления, а выходы соединены соответственно с первыми входами ли ейпого преобразователя, выходы которото через исполнительный .механизм соединены с соответствующими входами объекта управления, о т л и ч а ю щ а я с я тем, что, с целью повышения быстродействия системы оптимального управления, в ней установлены блох переключения и второй многоканальный оптимизатор, выход объекта управления соединен со входами блока лереключения и второго многоканального оптимизатора, выходы которого соединены соотвеТСТ1венно со вторыми входами линейного преобразователя, а выходы блока переключения соединены соответственно с управляющими входами первого и второго многоканальных оптимизаторов.
Источники информации, принятые во внимание -при экспертизе изобретения:
1.Растригин Л. А. Системы экстремального управления, М., «Наука, 1974 г., стр.356- 359.
2.Воронов А. А. Основы теории автоматического управления, -часть III, «Энергия, Л., 1970 г., стр. 179-185.
3.Розенброк X. и др. Вычислительные Методы для инженеров-химиков, М., «Мир, 1968г., стр. 444 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Многоканальный автоматический оптимизатор | 1980 |
|
SU949634A1 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ МНОГОКАНАЛЬНЫХ ПРЕОБРАЗОВАТЕЛЕЙ | 2012 |
|
RU2485583C1 |
| ИНСТРУМЕНТАЛЬНО-МОДЕЛИРУЮЩИЙ КОМПЛЕКС ДЛЯ ИССЛЕДОВАНИЯ РЕГЕНЕРИРУЮЩИХ ПРОЦЕССОВ С ДИСКРЕТНЫМ ВРЕМЕНЕМ НА ОСНОВЕ ПРОЦЕДУРЫ ОТРИЦАТЕЛЬНОГО ВЫБОРА | 2009 |
|
RU2420802C2 |
| Устройство для регулирования колебаний виброплощадки | 1981 |
|
SU987597A1 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ДВУХКАНАЛЬНЫХ ПРЕОБРАЗОВАТЕЛЕЙ | 2013 |
|
RU2530222C1 |
| Система и способ решения прикладных задач материаловедения с помощью сопряжения квантовых и классических устройств | 2023 |
|
RU2814969C1 |
| Оптимизатор | 1978 |
|
SU807204A1 |
| СПОСОБ СКРЫТНОГО ОБНАРУЖЕНИЯ РАДИОМОЛЧАЩИХ ОБЪЕКТОВ | 2018 |
|
RU2770176C1 |
| Способ пространственной локализации радиомолчащих объектов | 2020 |
|
RU2758585C1 |
| УСОВЕРШЕНСТВОВАННЫЙ МЕТОД КОДИРОВАНИЯ И ПАРАМЕТРИЧЕСКОГО ПРЕДСТАВЛЕНИЯ КОДИРОВАНИЯ МНОГОКАНАЛЬНОГО ОБЪЕКТА ПОСЛЕ ПОНИЖАЮЩЕГО МИКШИРОВАНИЯ | 2007 |
|
RU2485605C2 |
