ния и выходом блока интегрирования, соединенным также с одним из входов блока сравнения, другой вход которого соединен с выходом задат :ика, выходы блоков подстройки коэффициентов моделей соединень с дополнительными входами модели объекта.
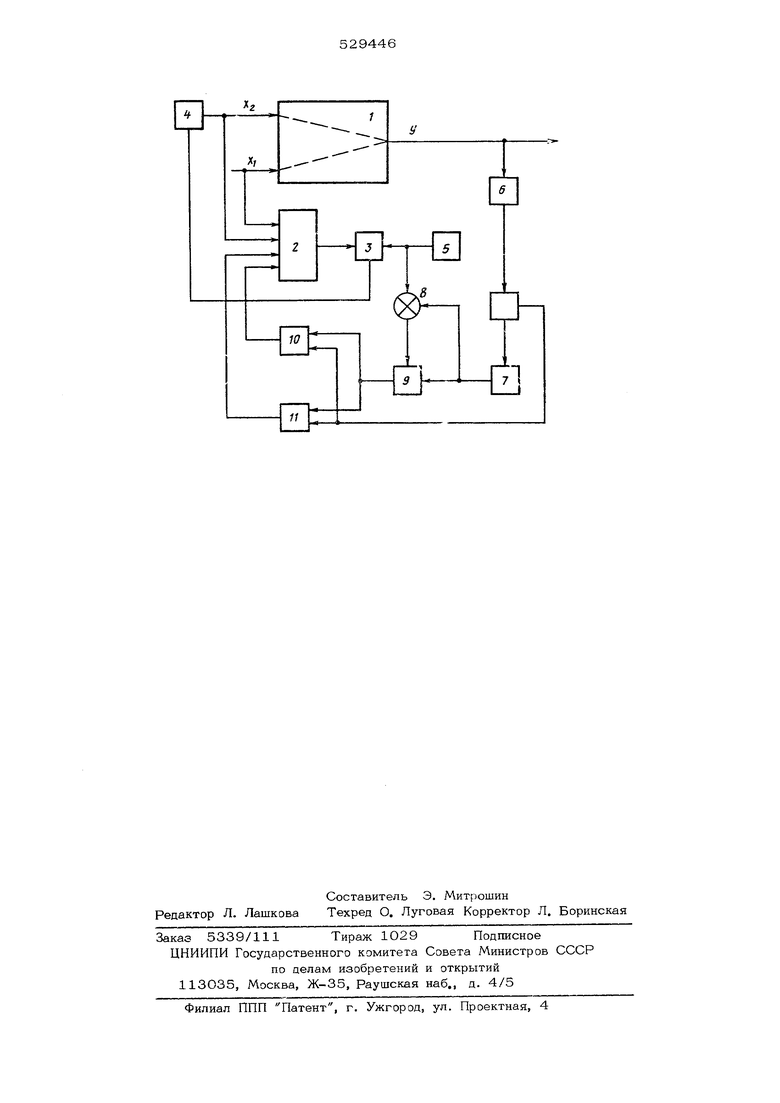
На чертеже дана блок-схема предлагаемого устройства.
Оно имеет объект 1, модель объекта 2, блок 3 формирования команды управления, исполнительный механизм 4 и за датчик 5, коммутатор 6, блок 7 интегрирования, блок
8сравнения, блок 9 , деления и блоки 10 я 11 подстройки коэффициентов модели.
Устройство работает следующим образом.
Возмущающие У. (например плотность пульпы) и управляющие хj (например скорость вращения вакуум-фильтра) воздействия проходят на объект управления 1 и модель, объекта 2. С выхода модели объекта 2 сигнал, пропорциональный прогнозируемому значению управляемого выходного параметра объекта 1, поступает на блок 3 формирования команды управления, где происходит его сравнение с заданным значением (сигнал от задатчика s).
Отработка разбаланса между значениями перечисленных сигналов осутцествпяетх;я исполнительным механизмом 4 за счет изменения значений управляющего технологичес кого фактора по закону сформированному блоком 3 формирования команд управления.
При индентификации статического объекта 1 разница между прогнозируемым и действительным значениями выхо.ного параметра может быть малой, но практически не равной нулю. Иэ-за дрейфа значений коэффициентов модели объекта 2, например, вызванном старением объекта колебаниями характеристик перерабатываемого сырья, эта разница может выходить из зоны технологических допусков.
Для автоматической оперативной коррекции значений коэффициентов модели 2 объекта сигнал, пропорциональный действительному значению выходного параметра объекта поступает через коммутатор 6 на вход блока 7 интегрирования.
Усредненный сигнал с выхода блока 7 интегрирования поступает на входы блока 8 сравнения и блока 9 деления. Блок 9 деления вычисляет относительную ошибку выходного параметра объекта . С выхода блока
9деления сигнал, пропорциональный относительной ощибке, поступает на входы блоков 0 и подстройки коэффициентов модели.
Выходные сигналы с блоков О и осуществляют подстройку коэффициентов модели объекта 2, причем время коррекции контролируется коммутатором 6.
При автоматической коррекции коэффициентов модели статики погрешность автостабилизации вакуум-фильтров может быть сннм жена до -2%. В этом случае годовой экономический эффект может достигнуть 4О- -60 тыс. рублей для объектов типа Райского обогатительного комбината.
Формула изобретения
Устройство для автоматического рэгуяи- рования технологических параметров процеосов фильтрации, имеющее блок формирования команды управления, входы которого соединены с выходом задатчика и модели объекта, а выход через исполнительный механизм соединен со входом объекта и входом модели объекта, отличающееся тем, что, с целью повыщения точности устройства, оно содержит блоки интегрирования и деления коммутатор, и два блока подстройки коэффициентов модели, причем вход коммутатора подключен к выходу объекта, а выходы подключены соответственно ко входу блока интегрирования и к первым входам блока подстройки коэффициентов модели, вторые входы которых соединены с выходом блока деления, входы которого соединены с выходом блока сравнения и выходом блока интегрирования, соединенным также с одним из входов блока сравнения, другой вход которого соединен с выходом задатчика, выходы блоков подстройки коэффициентов моделей соединены с дополнительными зходами модели объекта.
Источники информации, принятые во вни«мание при экспертизе:
. Авторское свидетельство, СССР,
№ 328924, М. Кл.
В О 1 7/04, 969.
2. Авторское свидетельство, СССР, № , М. Кл. В 37/04, 970.
3, Авторское свидетельство, СССР, № 349864, М. Кл. & 05 Ji 22/О2, 972 (прототип).
S
| название | год | авторы | номер документа |
|---|---|---|---|
| Адаптивная система управления для объектов с изменяющимся запаздыванием | 1986 |
|
SU1383292A1 |
| Автоматизированная адаптивная система управления рудновосстановительной электропечи | 1989 |
|
SU1806448A3 |
| Устройство для управления металлорежущим станком | 1979 |
|
SU857936A1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2013 |
|
RU2541848C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДИНАМИЧЕСКИМИ ОБЪЕКТАМИ УПРАВЛЕНИЯ С ИХ ИДЕНТИФИКАЦИЕЙ | 2015 |
|
RU2583746C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА | 2001 |
|
RU2187437C1 |
| Способ адаптивного управления исполнительным механизмом | 2023 |
|
RU2821298C1 |
| Система управления мощностью турбины | 1984 |
|
SU1227823A1 |
| Способы симуляции трения покоя и устройства для их реализации (варианты) | 2021 |
|
RU2779278C1 |
| Система автоматического регулирования турбины | 1982 |
|
SU1060797A1 |