Предлагаемые технические решения относятся к области управляемых систем, одной из возмущающих сил, воздействующих на которые, является трение. В частности, это системы с моделью (Краснова С.А., Уткин В.А. «Каскадный синтез наблюдателей состояния динамических систем», М., «Наука», 2006 г. - [1, рис. 1.1]) и системы с компенсацией трения, например Малафеева А.А., «Устройство для управления электроприводом с фрикционной нагрузкой», патент РФ на изобретение №2079961, МПК Н02Р 5/06, 1992 г. - [2]. В этих системах, в частности, осуществляется вычислительное моделирование (симуляция) значения трения в рабочих органах. Системы такого рода могут, например, использоваться для регулирования положения, скорости, развиваемого усилия (крутящего момента), выполняться цифровыми или аналоговыми, или аналого-цифровыми.
Особенностью силы трения (далее по тексту, когда говорится о силе, массе, скорости, ускорении поступательного движения, считается, что эти понятия эквивалентны понятиям момента силы, момента инерции, угловой скорости, углового ускорения для вращательного движения) является то, что она неспособна самостоятельно инициировать движение (не является активной силой), а только препятствует ему (под активными понимаются все действующие на систему силы, кроме сил трения и сил инерции). В общем случае сила (момент для вращательного движения) трения содержит три компоненты («Открытая физика 2.6», часть I, глава 1 «Механика», параграф 1.13 «Сила трения». http://www.physics.ru/courses/op25part1/content/chapterl/section/paragraph13/theory.html#.V-umt02a21h - [3]):
а) трение покоя РТП, которое в соответствии с первым законом Ньютона равно и противоположно направлено равнодействующей внешних активных сил PAC, пытающейся вызвать движение, пока та не превысит по модулю соответственно нижнего Ртр1 или верхнего Ртр2 порогового значения (РТП=-РАС при v=0 и - Ртр1≤РАС≤Ртр2, Ртр1 и Ртр2>0);
б) «сухое» (кулоновское) трение Ртрс постоянное по абсолютной величине (по крайней мере в достаточно малой окрестности) и направленное противоположно скорости v движения (Ртрс=Ртр3 при v<0, Ртрс=0 при v=0, Ртрс=-Ртр4 при v>0, Ртр3 и Ртр4>0);
в) «вязкое» и некулоновское трение Ртрв, величина которого зависит от скорости движения (Ртрв=f(v), a f(v)=0 при v=0).
При этом с увеличением абсолютного значения скорости относительного движения тел абсолютная величина силы трения сначала уменьшается (Штрибек-эффект) и при дальнейшем увеличении модуля скорости растет, ее знак сохраняется, пока не изменится знак скорости. Функция f(v) может быть отрицательной на начальном участке, но ее сумма с кулоновской компонентой всегда направлена против вектора скорости. Кулоновская составляющая трения движения может быть меньше максимального (по модулю) значения трения покоя (Ртр3≤Ртр1, Ртр4≤Ртр2) для соответствующего знака скорости (Монастыршин Г.И. «Математическое моделирование сухого трения» // «Автоматика и телемеханика», 1958 г., том 19, выпуск 12, стр. 1091-1106. - [4]). В общем случае значения параметров трения может зависеть и от положения пятна контакта на каждой из соприкасающихся поверхностей. Начало движения произойдет в направлении полученной (без учета силы инерции) равнодействующей суммы активных сил и реакций на них. После начала движения для получения правильного расклада сил следует находить проекцию суммы активных сил на направление вектора скорости, так как именно в этом направлении действует сила трения. (Далее по тексту как для состояния покоя, так и для состояния движения используется термин «проекция суммы активных сил»).
В Simulink MatLab предлагается для моделирования трения использовать «Блок сухого и вязкого трения (Coulomb and Viscous Friction)» (Студопедия, «Блок сухого и вязкого трения Coulomb and Viscous Friction», https://studopedia.ru/20_27818_blok-suhogo-i-vyazkogo-treniya-Coulomb-and-Viscous-Friction.html - [5]). При его реализации трение покоя на момент остановки не определяется. Скорость движения задается как входная величина извне. При движении трение представляется как нечетная функция с разрывом в нуле. Поэтому в модели на участках реверса и трогания трение ведет себя как активная сила, инициирующая движение. В [4] указывается, что при таком варианте симуляции трения в модели динамической системы возникают скользящие режимы, которые нехарактерны для реально протекающего процесса.
Чтобы исключить такого рода колебания можно [4] разрывную функцию скорости аппроксимировать ограниченной непрерывной, имеющей участок крутого наклона вблизи нулевого значения скорости (в частном случае линейной функцией с ограничениями сверху и снизу). Однако наличие наклонного участка характеристики порождает паразитные отклонения в процессе моделирования и исключает возможность смоделировать остановку. В статье [6, стр. 125] (Серебренный В.В., Бошляков А.А., Огородник А.И. «Математическая модель исполнительных модулей захватных устройств роботов» // Вестник БГТУ им. В.Г. Шухова. 2019 г., №6, стр. 123-135) также указывается, что при моделировании возникают алгебраические петли. Они могут привести к зацикливанию и остановке решения задачи. Там же [6, стр. 125, 126] говорится, что алгебраические петли могут быть устранены при применении динамической модели трения, в которой остановка симулируется как микродеформация в зоне пятна контакта. При этом коэффициенты в дифференциальных уравнениях являются функциями скорости, которая должна рассчитываться с учетом получаемых из этих уравнений (см., например, [6, формула (4)]) значений силы трения.
В описанном в [7, параграф 9.5] (Воронин С.Г. «Электропривод летательных аппаратов: Учебно-методический комплекс». - Offline версия 1.0. - Челябинск, 1995-2011. Глава 9, Следящие электроприводы, Параграф 9.5. http://model.exponenta.ru/epivod/glv_090.htm) способе моделирования трения считается, что трение имеет постоянный уровень, изменяется только при смене знака скорости и противоположно ей по направлению. При этом в отличие от [5] скорость считается здесь же как интеграл по времени от ускорения, полученного как частное от деления суммы всех сил (моментов), включая силу (момент) трения, на массу (момент инерции). То есть данный способ характеризуется тем, что определяется знак сигнала, соответствующего скорости относительного движения, и этот знак присваивается положительной константе, значение которой определяет уровень силы (момента) трения, а полученное значение инвертируется. Недостатки способа такие же, как и для [5].
В [1, стр. 136-165] описан способ управления манипулятором робота, в котором трение рассматривается как внешнее возмущение, действующее на механическую систему. Так как трение не является непосредственно измеряемой величиной, то для формирования его текущего значения используется сравнение оценок наблюдателя состояния и наблюдателя возмущений. При этом оценки возмущений ищутся в классе функций с ограниченными по величине производными. Как указывалось, трение может иметь разрыв при переходе от участка, соответствующего трению покоя, к участку, соответствующему трению движения. Кроме того, для получения оценок используются скользящие режимы, что приводит к дополнительному осреднению формируемой величины. Поэтому получаемые при таком способе моделирования оценки текущей величины трения являются в значительной степени осредненными.
В [2] предложено моделировать трение кусочно-линейной функцией от скорости с разрывом в нуле. Такой способ позволяет более точно реализовать трение на участке движения, но процессы остановки, трогания и реверса аналогично указанному для [5] моделируются неверно. К тому же трение движения может быть задано аналитически (см., например, [6, таблица 1]), что упрощает экспериментальные работы по определению соответствующей функции.
Способ, приведенный в [8] (Шендерович П.Б., «Устройство для моделирования нелинейности типа «сухое трение»», а.с. №334575 на изобретение СССР, м. кл. G06g 7/48, 1970 г.), реализует трение как функцию двух аргументов - суммы активных сил и скорости. При этом для ненулевого значения скорости реализуется кулоновское трение (при этом формируется сигнал разности активных сил и силы трения), а для случаев обнуления скорости - трение покоя (разность активных сил и силы трения приравнивается нулю). Однако недостатком описанного способа моделирования трения является то, что при моделировании реверса в случае, когда сумма активных сил меньше по модулю, чем сила трения покоя, смена знака скорости может произойти без срабатывания переключения на состояние покоя, а выработка принудительной команды на фиксацию нулевой скорости не предусмотрена. То есть устойчивость решения и правильность результатов не обеспечиваются.
Хотя способ, реализованный в [9] («Устройство для моделирования сухого трения», а.с. №1091186 на изобретение СССР, м. кл. G06G 7/25, 1982 г.), дополнен по сравнению с [8] операциями, предусматривающими формирование нелинейной параболической характеристики на участке движения, он также не предусматривает выработки команды на принудительное обнуление скорости.
Известна «Система численно-математического моделирования MatLab Stateflow - Simulink. Демонстрация трения скольжения в StateFlow, http://bourabai.ru/cm/friction.htm» [10], в которой для анализа текущего состояния (движение или покой) используются как текущее значение скорости, так и сумма активных сил. Сигнал, формируемый при переходе из состояния движения в состояние покоя, используется не только для переключения ветвей расчета силы трения, но и для принудительного обнуления скорости. При этом в отсутствие состояния покоя кулоновская компонента силы трения с уровнем, неравным силе трения трогания, реализуется за счет использования трехпозиционной (с фиксированным нулем) функции сигнатуры от скорости и операции умножения полученной сигнатуры на фиксированную величину, а при наличии состояния покоя сила трения вычисляется также с помощью функции сигнатуры, но уже от суммы активных сил, и операции умножения на меньшую из двух величин: модуля суммы активных сил и уровня силы трения трогания.
Недостатками этого способа является то, что для перехода из состояния движения в состояние покоя используется признак равенства скорости нулю. Так как [6, стр. 126] базовая кулоновская модель трения и все ее вариации, имеющие особую точку в области нулевых скоростей, приводят при численном моделировании реверсивных систем к ошибкам, поскольку переменная будет описываться вещественным числом с плавающей точкой и кроме как случайным образом не может стать равна 0. Сужение околонулевой зоны ведет к росту частоты решения задачи (Mathworks, Help Center, Signal threshold, https://www.mathworks.com/help/simulink/gui/signal-threshold.html - [11]). Расширение же зоны, прилегающей к нулю, приведет к качественному изменению моделируемого движения.
Наиболее близким к предлагаемому техническому решению является способ цифрового моделирования трения, (Лушников Б.В. «Компьютерное моделирование динамики элемента сухого некулонова трения» // «Известия Самарского научного центра Российской академии наук», т. 12, №1(2), 2010, стр. 439-444 - [12, рис. 1]). В модели организуется два взаимоисключающих состояния - движения и покоя. При этом считается, что, если скорость не нулевая, то имеет место состояние движения. Появление сигнала (передний фронт) о нулевом значении скорости в предыдущем такте (выход состояния блока интегрирования Simulink) запускает перевод модели в состояние покоя и установку в нуль текущей скорости путем сброса интегратора с установкой нулевых начальных условий. Если проекция суммы активных сил не превышает по модулю силы трения страгивания, то сила трения покоя равняется по величине и противоположна по направлению проекции суммы активных сил. Движущая сила (определяемая путем алгебраического сложения проекции суммы активных сил с силой трения) становится равной нулю (следует отметить, что равенство нулю движущей силы является необходимым условием перехода в состояние покоя после обнуления скорости, но в явном виде его использовать нельзя из-за алгебраической петли и возможности движения с постоянной скоростью). Соответственно, и ускорение, получаемое после деления движущей силы на массу, приведенную к точке, для которой вычисляется скорость движения, также становится нулевым. Пока это условие не нарушится, скорость на выходе интегратора будет оставаться нулевой, и состояние покоя в модели будет сохраняться. Когда же проекция суммы активных сил превысит по модулю силу трения страгивания в соответствующем направлении, сигнал на входе интегратора становится ненулевым (сила трения покоя по модулю не превышает силу страгивания в соответствующем направлении)/ Очевидно, что после интегрирования скорость также становится ненулевой, и создается предпосылка для формирования признака состояния движения в следующем такте вычислений. В состоянии движения при формировании силы трения вместо силы трения страгивания используется сумма кулоновской и некулоновской составляющих трения, зависящие соответственно первая от знака, а вторая от величины скорости движения. При этом в прототипе функция трения при покое является нечетной относительно суммы активных сил, а функция трения при движении - нечетной относительно скорости движения.
Недостатками данного способа являются использование для выработки команды на принудительное обнуление сигнала с выхода интегратора признака равенства нулю значения скорости на предыдущем такте вычислений, когда ускорение для текущего такта уже сосчитано. Сам по себе сдвиг момента времени, в который осуществляется проверка скорости, хотя и разрывает алгебраическую петлю, но как указывалось выше, вероятность, что в конкретный момент времени будет строго нулевой сигнал, крайне мала. О приемлемом значении допуска на зону обнуления скорости и его влиянии на устойчивость и правильность решения задачи в [12] не говорится.
Задачей предлагаемой группы изобретений является обеспечение физически правильной устойчивой симуляции трения покоя в динамической системе, которая работает реверсивно или с остановками.
Техническим результатом применения предлагаемых способов симуляции трения покоя является повышение точности соответствия поведения модели реальному физическому процессу в динамической системе без повышения порядка дифференциальных уравнений, используемых моделью.
В качестве дополнительного технического результата появляется возможность решения задачи с использованием в реальном времени аналоговых вычислителей и цифровых вычислительных средств того же порядка производительности, который обеспечивает решение задачи симуляции трения покоя известными методами.
Цель предлагаемого технического решения достигается, как вариант, за счет того, что:
- используют в качестве входных сигналов модели, зависящие от скорости кулоновские и некулоновские силы трения движения и проекцию суммы активных сил на направление уже осуществляемого движения или предполагаемое из состояния покоя;
- формируют взаимоисключающие признаки наличия состояния покоя или движения и логическую команду на обнуление моделируемой скорости при переходе от состояния движения к состоянию покоя;
- в состоянии покоя:
- формируют величину силы трения покоя как меньшее по модулю из значений силы трения страгивания и суммы проекции активных сил в соответствующем направлении (знак силы трения покоя противоположен знаку проекции суммы активных сил на предполагаемое направление движения);
- для определения движущей силы прибавляют с учетом их противонаправленности к проекции суммы активных сил на ожидаемое направление движения силу трения покоя;
- используют признак превышения значением модуля проекции суммы активных сил абсолютной величины силы трения страгивания для перехода в состояние движения;
- после того, как входной сигнал на интеграторе становится ненулевым, интегрирование ведется с нулевых начальных условий, а переход скорости от нулевого к ненулевому значению отменяет выработку признака состояния покоя, то есть соответствует выработке признака состояния движения
- в состоянии движения:
- для определения движущей силы прибавляют с учетом их противонаправленности к проекции суммы активных сил на направление движения силу трения движения;
- находят ускорение, деля движущую силу на массу (умножая на величину обратную массе), приведенную к соответствующей точке модели;
- признак перехода в состояния покоя вырабатывают с опережением к моменту, когда уменьшающаяся (по модулю) скорость должна достичь нуля, и при этом учитывают, что движущая сила (или ускорение) направлена в этот момент времени против скорости, а модуль проекция суммы активных сил на направление движения не превышает модуля силы страгивания в соответствующем направлении;
- при выработке логической команды на обнуление моделируемой скорости осуществляется сброс интегратора в нуль.
Заявляемый технический результат достигается и в том случае, если для перехода из состояния движения в состояние покоя сначала вырабатывают логическую команду на обнуление моделируемой скорости, для чего используют вместо признака равенства ожидаемой скорости нулю признак несовпадения знаков ожидаемой на текущий момент времени и предшествующей скоростей движения, и при этом используют эту логическую команду также для принудительного удержания до следующего такта вычислений нулевого значения сигнала скорости, используемого для выработки признака наличия состояния покоя.
Заявляемый технический результат также достигается, когда:
- для интегрирования ускорения используют сумматор с накоплением (см., например, Накапливающий сумматор, https://life-prog.ru/view_automati.php?id=16-[13]);
- для перехода из состояния движения в состояние покоя сначала по признаку несовпадения знаков ожидаемой на текущий момент времени и предшествующей скоростей вырабатывают логическую команду на обнуление моделируемой скорости и используют эту логическую команду для принудительного присвоения выходному сигналу сумматора с накоплением нулевого значения, а обнуленный сигнал скорости используется для выработки признака состояния покоя.
Все вновь вводимые операции по отдельности известны или могут быть составлены из более элементарных известных операций, как это описано в представленных материалах.
Осуществление предлагаемого способа происходит следующим образом (первый вариант).
Главной причиной возникновения паразитных колебаний при моделировании процесса, включающего в себя кулоновскую составляющую трения, является изменение знака скорости относительного движения без фиксации момента начала обнуления скорости, что приводит к обходу ветви модели, соответствующей стадии покоя. В результате в ветви модели, соответствующей стадии движения, трение скачком меняет знак, и в случае превышения трением проекции суммы активных сил на направление движения возникает ускорение, направленное против полученной скорости, что приводит к предпосылке очередной смены знака скорости и так далее. В цифровых моделях это усугубляется наличием квантования. Если на i-том шаге моделирования скорость равна v[i], ускорение - ε[i], а временной шаг - ΔT, то на следующем шаге v[i+1]=v[i]+ε[i]×ΔT. Поэтому, когда знак ε[i] противоположен знаку v[i] и ε[i]×ΔT по модулю больше v[i], знак v[i+1] будет противоположен знаку v[i].
Поэтому в моделях систем, включающих в себя компоненту трения, содержащую разрыв при нулевой скорости, это приводит к необходимости обнуления рассчитываемой скорости и принудительного перевода модели в состояние покоя. Для чего должен быть выработан соответствующий логический сигнал. Условиями выработки этого сигнала могут быть:
- значение скорости входит в окрестность, прилегающую к нулю в пределах точности решения задачи определения скорости;
- противоположность знаков текущего (или ожидаемого) и предыдущего значений скорости при условии нахождения модели в стадии движения;
- снижение ожидаемого значения интервала времени от текущего момента до смены знака скорости до величины меньшей временного шага решения задачи (или ожидаемое изменение знака скорости на текущем шаге вычислений по сравнению с его значением на начало текущего такта вычислений).
Первый из этих критериев используется в прототипе способов. В этом случае переход осуществляется только в случае очень точного (в пределах назначенной точности вычислений) попадания рассчитанной на текущем шаге скорости в нуль, и если в следующем такте нуль скорости не будет определен как интеграл от нулевого ускорения при нулевых начальных условиях, может начаться колебательный процесс. В прототипе это усугубляется тем, что анализируется значение скорости с предыдущего такта. Второй критерий срабатывает с опережением к моменту перехода скорости через ноль. Время до смены знака скорости при противоположных знаках скорости и ускорения может быть определено как (Коротков О.В., Жемеров В.И., Щеглова Л.А. «Способ управления электроприводом и устройство для его реализации (варианты)», патент на изобретение РФ №2628757, МПК Н02Р 23/00, Н02Р 25/00, 2016 г. - [14, стр. 7, строки 19-22]):

Если полученное положительное значение частного от деления будет меньше заданной величины, то это может служить основанием для выработки соответствующего логического сигнала. По переднему фронту (факту изменения уровня логического сигнала с«0» до «1») этого логического сигнала вырабатывается команда на сброс моделируемой скорости, а получение нулевого значения скорости переводит модель на ветвь, соответствующую состоянию покоя. Так как в этом случае скорость обнуляется до того, как может быть сформировано ее значение с противоположным знаком, то признак противоположности знаков текущего и предшествующего значений скорости уже не может сформироваться.
В прототипе при моделировании трения используются центрально-симметричные относительно нуля (нечетные) полиномиальные функции, тогда как в ряде случаев трение может представлять собой функцию общего вида. Такую функцию, в частности при движении вдоль прямой линии, можно смоделировать двумя раздельными наборами операций для разных направлений движения и проекции суммы активных сил, его инициирующих. Для моделирования могут быть использованы не только полиномы, но и другие функции (например, тригонометрические, степенные, логарифмические, кусочно-линейные приближения, сплайны и т.п.). Следует отметить, что параметры трения могут изменяться не только в зависимости от направления движения, но и от положения пятна контакта на каждой из соприкасающихся при движении поверхностей. При необходимости в случае получения из внешней системы вместе со значениями активных сил и компонент трения движения также и наборов координат (обобщенного фазового состояния) соответствующие функции могут быть также реализованы. Вектор силы трения будет направлен против направления движения в каждой точке траектории, когда движение имеет место. При этом в общем случае сумма активных сил может не совпадать с направлением движения (например, при наличии прижимающей в плоскости перпендикулярной пятну контакта и перпендикулярной направлению движения в плоскости пятна контакта компонент). То есть векторы силы трения и активных сил в процессе движения могут быть непараллельны друг другу. Поэтому для правильного симуляционного моделирования использовать для суммирования с силой трения необходимо именно проекцию суммы активных сил на направление движения.
В состоянии же покоя вектор силы трения направлен в плоскости пятна контакта (перпендикулярно прижимающей силе в точке контакта) противоположно сумме проекций активных сил (равнодействующей) на плоскость пятна контакта. Поэтому в начале движения вектор скорости будет направлен так же, как и проекция на плоскость пятна контакта вектора суммы активных сил, инициировавших его.
В связи с этим при движении расчет значений трения ведется в системе координат, связанной с направлением скорости, а в состоянии покоя - ее ожидаемым направлением. При этом, при необходимости, может быть учтена возможная неизотропность трения от направления движения и координат контактирующих поверхностей.
Предположим, что исходным является состояние покоя. Скорость равна нулю. Признак нахождения в состоянии покоя имеет уровень «истинно» (логической «1»). Полученную извне проекцию суммы активных сил с указанием ее направленности, в простейшем случае знака (в настоящем техническом решении способ расчета проекции суммы активных сил не рассматривается, как несущественный для решаемой задачи и зависящий от внешних факторов, например формы поверхности, по которой происходит движение), сравнивают с силой страгивания в направлении инициируемого движения. Если величина проекции сумм активных сил меньше силы страгивания, то сила трения покоя противоположно направлена и равна по величине проекции сумм активных сил. Разность величины проекции сумм активных сил и трения покоя равна нулю. Ускорение равно нулю, и скорость остается нулевой. Признак нахождения в состоянии покоя сохраняет свое значение. Если величина проекции сумм активных сил больше силы страгивания в соответствующем направлении, то сила трения покоя на момент начала движения равна по величине силе страгивания. Разность проекции сумм активных сил и трения покоя оказывается неравной нулю. Ускорение также становится ненулевым, и скорость в следующий момент времени перестает быть нулевой. Признак нахождения в состоянии покоя инвертируется (например с уровня логической «1» переходит на уровень логического «0»), и формируется признак состояния движения с уровнем «истинно». Формируется и поступает извне значение величины трения в зависимости от скорости, направления движения и координат контактирующих поверхностей. Полученное значение трения алгебраически суммируется с проекцией суммы активных сил на направление вектора скорости. Поскольку трение движения вблизи нулевой скорости не превышает трения страгивания, увеличение скорости продолжится до достижения равновесия силы трения движения и проекции суммы активных сил. (Наличие боковых по отношению к вектору скорости компонент суммы активных сил может при необходимости учитываться во внешней системе для корректировки направления скорости движения). Если величина проекции суммы активных сил станет (с учетом направления относительно скорости движения) меньше текущего значения силы трения, начнется торможение. Оно будет происходить до достижения новой скорости равновесия.
Когда же величина проекции суммы активных сил станет направленной противоположно движению или достаточно малой по модулю (например для зависимости вида [2, фиг. 3], меньше силы кулоновского трения, когда скорость выше соответствующей минимуму модуля для трения движения, или же не больше модуля трения страгивания, когда скорость между нулем и этим значением), скорость станет стремиться к нулю. Если известны допустимые пределы погрешности вычисления скорости то, исходя из силы трения страгивания (или с запасом - кулоновской компоненты трения движения) и массы, может быть рассчитано максимальное значение интервала времени, для которого допустимо априорно задать значению скорости нулевую величину до того, как интегрирование ускорения приведет к изменению ее знака. Оценка этого времени может быть осуществлена, например, как:

где ΔV - допустимая погрешность моделирования скорости;
ε - величина смоделированного на текущий момент времени ускорения;
Δε - максимально возможная погрешность вычисления ускорения.
В зависимости от того, какая из величин будет меньше - шаг решения задачи или ΔTV, при определении выполнения условия перехода в состояние покоя это значение может использоваться в качестве порогового Тпор.
Условие попадания в интервал может быть записано как:

Знак «минус» обусловлен тем, что при торможении ускорение противоположно скорости, если частное не инвертировать, интервал допустимых значений из неотрицательного станет неположительным.
При постоянной массе ускорение может быть заменено на разность проекции суммы активных сил и трения движения, а порог сравнения изменен пропорционально численному значению массы в соответствующей системе единиц. Возможен случай, когда на участке торможения проекция суммы активных сил, направленная против движения, по модулю превышает силу трения страгивания. Тогда для реального физического процесса остановка будет иметь практически нулевую протяженность во времени (но при постоянном значении проекции суммы активных сил ускорение разгона по модулю будет меньше ускорения торможения, так как трение сменит знак). Поэтому при моделировании искусственно удерживать в течение такта вычислений скорость в нуле нет необходимости, хотя в такте вычислений, соответствующем смене знака скорости будет получен завышенный (по модулю) результат для скорости. Совместное выполнение условия ожидаемого достижения нулевой скорости (или уже установившейся) и непревышения проекцией суммы активных сил силы трения страгивания обуславливает выработку признака состояния покоя. Переход признака состояния покоя с уровня «ложно» (логического «0») на уровень «истинно» является условием выработки логической команды на сброс моделируемой скорости и установку нулевых начальных условий интегрирования ускорения. Пока проекция суммы активных сил не превысит величину трения страгивания, трение покоя приравнивается по величине и инвертируется по направлению (знаку) относительно проекции суммы активных сил, поэтому движущая сила равняется нулю, и скорость остается нулевой. Это удерживает выработку признака состояния покоя (см. выше). Крайним условием для сохранения состояния покоя является достижение модулем проекции активных сил величины силы трения страгивания в соответствующем направлении. Как только модуль проекции активных сил превысит величину силы трения страгивания, движущая сила перестанет быть нулевой. Интегрирование ускорения даст отличное от нуля значение скорости. Условия равенства нулю скорости движения и непревышения модулем проекции суммы активных сил величины модуля силы трения страгивания, каждое из которых необходимо для удержания состояния покоя, нарушатся. Модель перейдет в состояние движения.
При таком способе моделирования трения покоя паразитных колебаний сразу после остановки не возникает, так как в момент остановки проекция суммы активных сил по условию перехода в состояние покоя не превышает силы трения страгивания.
В другом варианте реализации способа симуляции трения покоя для формирования состояния покоя также принудительно обнуляют интеграл от ускорения, но делают это по признаку изменения знака ожидаемого на текущий момент значения скорости и знака предшествующей скорости. Ожидаемая скорость может быть, в частности, определена, как это предложено в [14, стр. 8, формула (3а)]:

или

где V - моделируемая скорость (V(t+μΔt) - ожидаемое, V(t) - предшествующее, V(t-Δt) - необходимое для оценки изменения значения);
t - рассматриваемый момент времени;
Δt - интервал задержки (упреждения);
μ - коэффициент, учитывающий возможность переменного шага решения задачи.
Данная зависимость представляет собой версию линейной экстраполяции. Соответственно, при необходимости повышения точности могут быть предложены варианты экстраполяции более высоких порядков.
Несовпадение знаков ожидаемой и предшествующей скорости может быть определено по разным признакам, например:
а) по-отдельности определяют знаки ожидаемой и предшествующей скоростей, находят произведение сигнатур, признаком является отрицательное значение произведения;
б) находят произведение ожидаемой и предшествующей скоростей, определяют его знак, признаком является отрицательное значение знака;
в) находят частное от деления скоростей (предпочтительно использовать в качестве делителя большее по модулю значение), определяют знак частного, признаком является отрицательное значение знака;
г) если использовать функцию сигнатуры, значение которой при нуле аргумента не определено, после определения по-отдельности знаков ожидаемой и предшествующей скоростей, сравнивают значение сигнатур, признаком является их несовпадение.
Сформированная логическая команда на обнуление моделируемой скорости используется, во-первых, для сброса интегратора и установки на нем нулевых начальных условий, а во-вторых, принудительной установки в нуль сигнала о скорости, используемого для выработки признака перехода в состояние покоя. При этом на момент перехода из состояния движения в состояние покоя разрывается алгебраическая петля, так как скорость с выхода интегратора не используется непосредственно ни для формирования логической команды на обнуление моделируемой скорости, ни для формирования признака состояния покоя. По аналогии с вышеописанным, принудительно установленное нулевое значение сигнала о скорости, анализируемого для формирования признака состояния покоя, формирует признак состояния покоя с уровнем логическая «1». В этом состоянии уровню трения покоя присваивается меньшее из модулей значений трения страгивания в соответствующем направлении и проекции суммы активных сил, а знак берется противоположным направлению проекции суммы активных сил. Соответственно, пока проекция суммы активных сил на предполагаемое направление движения не превысит силу трения страгивания на этом же направлении, движущая сила будет оставаться нулевой, и интеграл от ускорения также останется нулевым, поэтому независимо от наличия или отсутствия логической команды на обнуление скорости признак состояния покоя «1» продолжает вырабатываться. Если же указанное превышение будет иметь место сразу же на момент выработки признака состояния покоя, изменение логической команды на обнуление моделируемой скорости сможет произойти только в следующем такте вычислений с использованием новых значений ожидаемой и предшествующей скоростей.
Возможен также и еще один вариант способа симуляции трения покоя, имитирующий применение накапливающего сумматора в качестве интегрирующего элемента. Интеграл при этом получают как сумму предыдущего значения с выхода сумматора с сигналом ускорения, умноженным на временной шаг решения задачи. Поэтому для сброса в нуль достаточно на очередном такте вычислений заменить предыдущее значение с выхода сумматора на нуль. Выработку логической команды на обнуление скорости формируют аналогично предыдущему варианту по признаку несовпадения знаков ожидаемой на текущий момент времени и предшествующей скоростей. По переднему фронту этого признака устанавливают нуль вместо удерживаемого значения скорости с выхода сумматора. Это обнуленное значение сигнала используют для выработки признака перехода в состояние покоя. Также как и для предыдущих вариантов, если значение проекция суммы активных сил не превышает величину силы трения страгивания, трение покоя равно проекции суммы активных сил с противоположным знаком. На выходе накапливающего сумматора поддерживается нулевое значение, и независимо от наличия или отсутствия логической команды на обнуление скорости признак состояния покоя продолжает вырабатываться. Если же проекция суммы активных сил превысит силу трения страгивания, появится ускорение, и на выходе сумматора появится скорость. Логическая команда на обнуление скорости сразу вырабатываться не будет. Состояние покоя снимется. Модель перейдет в состояние движения. Если же окажется, что проекция суммы активных сил превысит трение страгивания сразу же после перехода в состояние покоя, то до следующего такта зафиксируется нулевое значение скорости, после чего движение возобновится. Момент трения покоя для этой точки сформирован не будет (движущая сила не нулевая).
Из описанного видно, что применение описанных способов позволяет разорвать алгебраические петли и обеспечить устойчивое и соответствующее его физической природе моделирование трения покоя в составе динамической системы. То есть достигается требуемый технический результат. При этом количество дополнительных операций невелико и не требуется дополнительного сокращения временного шага решения задачи, так как при расчете ожидаемых скоростей используется та же или большая величина шага, что и для интегрирования ускорения (и/или предшествующих текущему шагу). Порядок дифференциальных уравнений остается первым (интегрируется только ускорение). Роста вычислительной мощности и объемов памяти практически не требуется.
На базе описанных способов могут быть созданы реализующие их устройства - симуляторы трения.
В качестве прототипа рассматривается подсистема моделирования сухого трения [12, рис. 1] (симулятора сухого трения). В ней можно выделить следующие группы элементов. Блок определения ускорения (БОУ) выполнен как последовательно установленные алгебраический сумматор и масштабирующий элемент (при переменной приведенной массе можно использовать блок деления или умножения). Выход масштабирующего элемента является выходом БОУ. Первый вход алгебраического сумматора, является первым входом симулятора трения (входом проекции активных сил), второй вход - входом трения, а выход - выходом движущей силы. Выход БОУ соединен с первым входом интегратора, первый выход которого является первым выходом симулятора сухого трения. Вход нуль-органа (НО) связан со вторым (по состоянию) выходом интегратора, а выход - со вторым входом интегратора (по сбросу) и управляющим входом коммутатора. На один из входов коммутатора подается трение покоя, а на другой трение движения. Выход коммутатора соединен со вторым выходом симулятора сухого трения и вторым входом сумматора. Для симуляции трения покоя используется формирователь трения покоя (ФТП), вход которого соединен с первым входом сумматора. Как уже указывалось, трение покоя поступает на коммутатор. Внутри ФТП состоит из последовательно соединенных задатчика трения страгивания (ЗТС) и формирователя удерживающей силы (ФУС). Второй вход ФУС соединен со входом ФТП, а выход - с выходом ФТП. ФУС содержит блок сигнатуры (БСг) и последовательно соединенные блок абсолютной величины (БАВ), блок сравнения (БС) и перемножитель, выход которого служит выходом ФУС. Входы БСг и БАВ соединены друг с другом и подключены ко второму входу ФУС. Выход БСг связан со вторым входом перемножителя, а второй вход БС соединен с первым входом ФУС.Предполагается, что задатчик трения страгивания формирует его абсолютную величину. Поэтому в блоке сравнения определяется, какое из двух неотрицательных значений (модуля трения страгивания или модуля проекции суммы активных сил) меньше (при равенстве отдается, например, преимущество одному из входов или тому, сигнал которого был признан меньшим на предыдущем шаге). Оно и передается на выход блока сравнения. Так как это положительная величина, ей присваивается знак проекции суммы активных сил. Эта операция в прототипе выполняется перемножителем.
Когда значение сигнала со второго выхода интегратора становится близким к нулю, НО формирует сигнал с уровнем логическая «1». Коммутатор подключает ко второму входу сумматора сигнал силы трения покоя. Если проекция суммы активных сил по модулю не превышает силы трения страгивания, то движущая сила будет нулевой. Поскольку интегратор тем же логическим сигналом был сброшен в нуль, интегрирование ускорения также даст нулевую скорость. Но так как сигнал о состоянии интегратора выдается с задержкой по отношению к сигналу с первого выхода, он может оказаться ненулевым. Это может прервать состояние покоя, тогда как оно должно было бы еще продолжаться. С другой стороны, когда в состоянии покоя проекция суммы активных сил по модулю превысит силу трения страгивания, ускорение станет ненулевым, но на вход НО будет продолжать поступать нулевой сигнал, и коммутатор оставит подключенным ко второму входу сумматора сигнал трения покоя. Такие временные нестыковки искажают физическую картину, моделируемую симулятором трения, и могут вызвать паразитные колебания.
Задача заключается в обеспечении устойчивой симуляции трения покоя с обеспечением соответствия результатов моделирования реальной физической картине.
Техническим результатом является обеспечение возможности точного определения трения покоя в системах, использующих в своей работе модель трения, в том числе для компенсации его влияния на результаты работы системы, в частности точность, без необходимости увеличения производительности ее вычислителя и требуемой памяти.
Указанный технический результат достигается за счет того, что в симулятор трения покоя, содержащий нуль-орган и последовательно соединенные формирователь трения покоя, коммутатор, блок определения ускорения, второй вход которого является первым входом симулятора трения покоя, и интегратор, выполненный с возможностью сброса, первый выход которого является первым выходом симулятора трения покоя, причем вход формирователя трения покоя соединен со вторым входом блока определения ускорения, второй вход коммутатора является входом управления, а третий его вход является вторым входом симулятора трения покоя, дополнительно введены последовательно соединенные блок деления, формирователь признака попадания в интервал (ФППИ), блок «ИЛИ» и блок «И». Формирователь трения покоя выполнен с двумя выходами. Первый из них выдает в качестве трения покоя меньшую из величин модуля трения страгивания и модуля проекции суммы активных сил со знаком проекции суммы активных сил. Со второго выхода ФТП выдается логический сигнал о том, что модуль силы трения страгивания не меньше модуля проекции суммы активных сил. При этом выход блока «И» соединен со входом управления коммутатором, первый вход блока деления соединен с выходом интегратора и входом нуль-органа, второй вход блока деления соединен с выходом блока определения ускорения, второй вход интегратора соединен с выходом формирователя признака попадания в интервал, второй вход блока «ИЛИ» соединен с выходом нуль-органа, а второй вход блока «И» соединен со вторым выходом формирователя трения покоя. Первый выход ФТП используется как второй выход симулятора трения покоя. (БД и ФППИ используются для формирования упреждающего сигнала об обнулении скорости).
Технический результат достигается также и тогда, когда в симулятор трения покоя, содержащий нуль-орган и последовательно соединенные формирователь трения покоя, первый коммутатор, блок определения ускорения, второй вход которого является первым входом симулятора трения покоя, блок определения ускорения и интегратор, выполненный с возможностью сброса, вход формирователя трения покоя соединен со вторым входом блока определения ускорения, второй вход первого коммутатора, является входом управления и соединен с выходом нуль-органа, а третий его вход является вторым входом симулятора трения покоя, дополнительно введены второй коммутатор и последовательно соединенные первый (БЗ1) и второй (БЗ2) блоки задержки, первый и второй сумматоры и блок определения несовпадения знаков (БОНЗ). При этом выход второго коммутатора является первым выходом симулятора трения покоя и соединен со входом нуль-органа, а его вход - с выходом интегратора и входом первого блока задержки. Выход первого блока задержки соединен также со вторыми входами первого и второго сумматоров и блока определения несовпадения знаков, а выход БОНЗ соединен со вторым входом интегратора и входом управления второго коммутатора. (БЗ1, БЗ2, первый и второй сумматоры, БОНЗ используются для формирования упреждающего сигнала об обнулении скорости).
Технический результат может быть достигнут и в том случае, когда в симулятор трения покоя, содержащий нуль-орган и последовательно соединенные формирователь трения покоя, первый коммутатор, блок определения ускорения, второй вход которого является первым входом симулятора трения покоя, причем вход формирователя трения покоя соединен со вторым входом блока определения ускорения, второй вход первого коммутатора, является входом управления и соединен с выходом нуль-органа, а третий его вход является вторым входом симулятора трения покоя, дополнительно введены последовательно соединенные первый блок задержки, накапливающий сумматор, второй коммутатор, второй блок задержки и блок определения несовпадения знаков. При этом выход второго коммутатора является первым выходом симулятора трения покоя и соединен со входом нуль-органа и вторым входом блока определения несовпадения знаков, выход которого соединен со вторым входом второго коммутатора. Выход второго блока задержки также соединен со вторым входом накапливающего сумматора. (БЗ2 и БОНЗ используются для формирования упреждающего сигнала об обнулении скорости).
Все применяемые в предложенных вариантах симуляторов трения покоя составные части по отдельности известны или могут быть получены путем соединения известных элементов известным образом.
ЗТС, ФТП, БОУ могут быть выполнены, как в прототипе. В необходимых случаях в тексте указано, как их можно модифицировать. Сумматоры, интеграторы, коммутаторы, логические элементы, блоки сравнения, блоки задержки, блоки деления и умножения общеизвестны. Нуль-орган может быть реализован как в прототипе или в [14]. По тексту также даны пояснения о возможной реализации формирователя признака попадания в интервал и БОНЗ.
Для иллюстрации предлагаемых технических решений на фиг. 1-3 приведены функциональные схемы вариантов исполнения симуляторов трения покоя (СТП), на фиг. 4 - примеры реализаций для ФТП, на фиг. 5 - варианты реализаций ФУС. Приведенные на фиг. 1-5 элементы имеют следующие позиционные обозначения: 1 - формирователь трения покоя, 2 - блок «И», 3 - коммутатор (первый), 4 - нуль-орган, 5 - блок определения ускорения, 6 - интегратор, 7 - блок деления, 8 - формирователь признака попадания в интервал, 9 - блок «ИЛИ», 10 - сумматор (второй), 11 - блок определения несовпадения знаков, 12 - коммутатор (второй), 13 - блок задержки (первый), 14 - блок задержки (второй), 15 - сумматор (первый), 16 - накапливающий сумматор, 17 - формирователь удерживающей силы, 18 - задатчик трения страгивания, 19 - компаратор, 20 - коммутатор (третий), 21 - перемножитель, 22 - блок сигнатуры, 23 - блок абсолютной величины, 24 - регулируемый ограничитель.
Функциональная схема первого варианта СТП приведена на фиг. 1. На ней изображены нуль-орган (4), последовательно соединенные формирователь (1) трения покоя, коммутатор (3), блок (5) определения ускорения, интегратор (6), блок (7) деления, формирователь (8) признака попадания в интервал, блок (9) «ИЛИ» и блок (2) «И». Второй выход ФТП (1) соединен со вторым входом блока (2) «И». Второй вход БД (7) соединен с выходом БОУ (5). Второй вход блока (9) «ИЛИ» соединен с выходом нуль-органа (4), вход которого соединен выходом интегратора (6). Выход блока (2) «И» соединен с управляющим входом коммутатора (3). Выход ФППИ (8) соединен со вторым входом интегратора (6). Вход ФТП (1) соединен со вторым входом БОУ (5). При этом последовательно соединенные блок (7) деления и формирователь (8) признака попадания в интервал образуют формирователь упреждения, причем первый вход блока (7) деления является первым входом формирователя упреждения, второй его вход - вторым входом формирователя упреждения, а выход формирователя (8) признака попадания в интервал является выходом формирователя упреждения.
На фиг. 2 (функциональная схема второго варианта СТП) изображены последовательно соединенные ФТП(1), первый коммутатор (3), блок (5) определения ускорения, интегратор (6), первый блок (13) задержки (БЗ1), второй блок (14) задержки (БЗ2), первый сумматор (15), второй сумматор (10), блок (11) определения несовпадения знаков, последовательно соединенные второй коммутатор (12) и нуль-орган (4). Выход НО (4) соединен со входом управления первого коммутатора (5). Вход ФТП (1) соединен со вторым входом БОУ (5). Выход интегратора (6) соединен с сигнальным входом второго коммутатора (12). Дополнительные входы первого и второго сумматоров и БОНЗ (11) соединены с выходом БЗ1 (13). Первый вход второго коммутатора (12) соединен с выходом интегратора (6). Выход БОНЗ (11) соединен со входом сброса интегратора (6) и управляющим входом второго коммутатора (12). При этом последовательно соединенные первый и второй блоки ((13) и (14)) задержки, первый и второй сумматоры ((15) и (10)) и блок (11) определения несовпадения знаков образуют формирователь упреждения, причем вход первого блока (13) задержки соединен со входом формирователя упреждения, а его выход также соединен со вторыми входами первого и второго сумматоров ((15) и (10)) и блока(11) определения несовпадения знаков, выход которого соединен с выходом формирователя упреждения.
Функциональная схема третьего варианта СТП (фиг. 3) содержит нуль-орган (4) и последовательно соединенные формирователь (1) трения покоя, первый коммутатор (3), БОУ (5), первый блок задержки (13), накапливающий сумматор (16), второй коммутатор (12), второй блок (14) задержки и блок (11) определения несовпадения знаков. При этом выход НО (4) соединен со входом управления первого коммутатора (3), а его вход и второй вход БОНЗ (11) соединены с выходом второго коммутатора (12). Второй вход накапливающего сумматора (НС) соединен с выходом БЗ2 (14). Выход БОНЗ (11) связан со входом управления второго коммутатора (12). Вход ФТП (1) соединен со вторым входом БОУ (5). При этом последовательно соединенные второй блок (14) задержки и блок (11) определения несовпадения знаков образуют формирователь упреждения, причем вход второго блока (14) задержки соединен с первым входом формирователя упреждения и вторым входом блока (11) определения несовпадения знаков, выход второго блока (14) задержки соединен с первым выходом формирователя упреждения, а выход блока (11) определения несовпадения знаков соединен со вторым выходом формирователя упреждения.
Приведены в качестве примера два возможных исполнения ФТП (1). На фиг. а) 4 изображены последовательно соединенные задатчик (18) трения страгивания и формирователь (17) удерживающей силы. На фиг. б) 4 дополнительно показана связь от входа ФТП (1) на вход ЗТС (18).
При этом исполнение ФУС (17) также может быть разным. На фиг. а) 5 приведены блок (22) сигнатуры и последовательно соединенные блок (23) определения абсолютной величины, компаратор (19), третий коммутатор (20), перемножитель (21). При этом вход блока (22) сигнатуры соединен со входом блока (23), а выход со вторым входом перемножителя (21). Второй вход компаратора соединен со вторым входом третьего коммутатора, а третий вход третьего коммутатора соединен с первым входом компаратора. На фиг. б) 5 показан регулируемый ограничитель (24) (РО), управляющий вход которого является первым входом ФУС (17), второй вход которого служит вторым входом ФУС, а выход - его выходом.
Работа симуляторов трения покоя осуществляется следующим образом (в качестве исходного состояния рассматривается состояние движения).
Во всех предлагаемых вариантах реализации СТП на первый вход блока (5) определения ускорения поступает с выхода коммутатора (3) сигнал о значении силы трения РТР. На второй вход БОУ (5) извне поступает сигнал о значении проекции суммы активных сил РАС (В описываемых технических решениях не рассматривается влияние на величину силы трения прижимающей силы, т.е. компоненты активных сил, направленной по нормали к пятну контакта, которое обычно учитывается через коэффициент трения). Этот вход рассматривается как первый вход СТП и связан также со входом ФТП (1). Коммутатор (3) обеспечивает указанную при описании способов функцию обеспечения взаимоисключающего использования трения покоя и трения движения в соответствующих состояниях. В состоянии движения выход коммутатора (3) подключен к его второму входу, на который извне поступает сигнал о значении силы трения движения РТД. Этот вход рассматривается как второй вход СТП. (Вопросы формирования проекции суммы активных сил и трения движения в настоящем описании не рассматриваются и являются известными, см. например [2], [6], [8], [9]). В БОУ (5) сигналы с первого и второго его входов алгебраически суммируются и делятся на массу, приведенную к соответствующей точке. Соответствующие операции приведены и при описании способов. Частное от деления представляет собой сигнал пропорциональный ускорению ε. Входной сигнал для массы на фиг. 1-3 не показан ввиду очевидности.
В первом варианте СТП (фиг. 1) с выхода блока (5) определения ускорения сигнал 8 поступает на первый вход интегратора (6). Интегратор (6) выполнен с возможностью сброса выходного сигнала и продолжения интегрирования с новыми начальными условиями, в частности нулевыми. На необходимость обнуления скорости при переходе в процессе моделирования от состояния движения в состояние покоя также говорилось при описании способов. Поскольку на первый вход интегратора приходит сигнал пропорциональный ускорению, на его выходе будет сигнал v пропорциональный скорости. Об операции интегрирования сигнала пропорционального ускорению говорилось и при описании способов. В описываемом варианте исполнения выход интегратора (6) является первым выходом СТП. Он также соединен со входами нуль-органа (4) и блока (7) деления. Пока на входе нуль-органа (4) скорость отличается от нуля (в пределах зоны чувствительности), он вырабатывает сигнал, соответствующий логическому «0». То есть по этой ветви предпосылки для перехода в состояние покоя не создается. Последовательно соединенные блок (7) деления и формирователь (8) признака попадания в интервал образуют разновидность формирователя упреждения [14], при этом первый и второй входы БД (7) могут рассматриваться соответственно как первый и второй входы формирователя упреждения (ФУ). Сигнал на выходе ФППИ (8), соответствующий логической «1», означает, что ожидаемая скорость в очередном цикле вычислений станет равна нулю или изменит свой знак. О желательности выработки логического сигнала на обнуление сигнала пропорционального скорости с опережением к фактическому его обнулению указывалось выше при описании способов. Как уже указывалось, на первый вход БД (7) приходит сигнал пропорциональный скорости. На второй же его вход поступает сигнал пропорциональный ускорению с выхода БОУ (5). Так как торможение происходит только, когда знаки скорости и ускорения противоположны, время ΔT до остановки можно оценить как проинвертированное частное от деления сигнала с первого входа БД (7) на сигнал с его второго входа. Чтобы избежать неопределенности при делении на нуль, поскольку при нулевом ускорении изменение скорости невозможно, в случае нулевого ускорения выходной величине БД (7) присваивается значение, выходящее за пределы, для которых ФППИ (8) формирует логическую «1» (или же при нулевом значении ускорения выходному сигналу с ФППИ (8) сразу присваивается значение логического «0»). ФППИ (8) в общем случае проверяет, что рассчитанное время до ожидаемой остановки является неотрицательным и при этом меньше заданного (или рассчитанного в предыдущем цикле вычислений) значения. Это значение не превышает текущего шага решения задачи. С выхода ФППИ (8) логический сигнал UСЗ поступает на первый вход блока (9) «ИЛИ» (с учетом указанного при описании способов объединяются логические признаки фактического и прогнозируемого обнуления сигнала пропорционального скорости) и второй вход интегратора (6). Для интегратора (6) этот сигнал является командой сброса, по которой выходному значению скорости присваивается нуль, и начальные значения для интегрирования тоже обнуляются. Таким образом, создается предпосылка для перевода СТП в состояние покоя. Однако обнуление в процессе моделирования текущей или ожидаемой скорости не является для первого варианта СТП достаточным условием для перехода в состояние покоя, так как, если сигнал о проекции суммы активных сил по модулю превышает сигнал о силе трения страгивания, движение не останавливается. Формирование признака о непревышении модулем сигнала о проекции суммы активных сил абсолютного значения сигнала о силе трения страгивания (до присвоения знака РС рассматривается как положительная величина) осуществляется в ФТП(1). Проверка соотношения модулей указанных сигналов предусматривалась и при описании соответствующего варианта способа.
В отличие от прототипа в формирователе (17) удерживающей силы блок сравнения на фиг. а) 5 показан развернуто как последовательно соединенные компаратор (19) и третий коммутатор (20), при этом первый вход третьего коммутатора (20) является входом управления. На первый вход компаратора (19) поступает сигнал РС об абсолютной величине силы трения страгивания с первого входа формирователя (17) удерживающей силы, который также подается на второй вход третьего коммутатора (20). На второй же вход компаратора (19) поступает сигнал РАСа о модуле проекции суммы активных сил с выхода блока (23) абсолютной величины, который также приходит на третий вход третьего коммутатора (20). В компараторе (19) сравниваются сигналы модулей силы трения страгивания и проекции суммы активных сил. Если величина сигнала на его первом входе больше чем на втором, компаратор вырабатывает сигнал UПАС с уровнем логической «1», по которому третий коммутатор (20) пропускает на выход сигнал с его третьего входа. В противном случае на выход поступает сигнал с его второго входа. Таким образом, выходной сигнал РТПа третьего коммутатора (20) представляет собой как и на выходе блока сравнения прототипа меньшее из значений сигналов на его втором и третьем входах. При этом управляющий сигнал с выхода компаратора (19) передается на второй выход ФТП (1) в качестве признака того, что сигнал о модуле проекции суммы активных сил не превышает сигнал о модуле силы трения страгивания. На входы блока (22) сигнатуры и БАВ (23) поступает сигнал РАС со второго входа ФУС (17) пропорциональный величине проекции суммы активных сил. Поэтому на выходе БСг (22) значение соответствует знаку сигнала о проекции суммы активных сил. Таким образом, произведение величин, поступающих на первый вход перемножителя (21) с выхода третьего коммутатора (20) и на второй вход - с выхода блока сигнатуры (22), дает значение РТП пропорциональное трению покоя со знаком проекции суммы активных сил.
Как только на первый и второй входы блока (2) «И» одновременно поступят сигналы с уровнем логическая «1», на его выходе сигнал UПП также примет значение логической «1». Одновременное наличие указанных сигналов предусматривалось и при описании соответствующего варианта способа. При его получении на свой вход управления коммутатор (3) переключит свой выход со второго входа на первый. В СТП сформируется состояние покоя. В состоянии покоя выдаваемый вовне через второй выход СТП с первого выхода ФТП (1) сигнал определяет значение трения покоя. Необходимость выдачи во внешнюю систему дополнительно сигнала с выхода блока (2) «И» или какой-то другой комбинации сигналов в настоящем описании не рассматривается как выходящая за предмет описываемых технических решений. В состоянии покоя на первый вход БОУ (5) поступает сигнал о трении покоя, на второй его вход приходит сигнал о величине проекции суммы активных сил. Так как в этом состоянии сигнал о силе трения покоя направлен противоположно сигналу проекции суммы активных сил, при алгебраическом суммировании сигнал о силе трения берется инвертированным, поэтому сигнал о движущей силе будет равным нулю. Соответственно нулю будет равен и сигнал пропорциональный ускорению на выходе БОУ (5). Поэтому сигнал о скорости на выходе интегратора (6) останется нулевым (как описывалось выше, перед переходом в состояние покоя интегратор был сброшен в нуль). В связи с этим на выходе нуль-органа (4) будет формироваться сигнал с уровнем логическая «1», и до тех пор, пока модуль сигнала проекции суммы активных сил не превысит модуля сигнала силы страгивания, на втором выходе формирователя (1) трения покоя также будет сигнал с уровнем логическая «1». Вследствие этого на выходе блока (2) «И» также будет логическая «1», и через коммутатор (3) продолжит проходить сигнал о силе трения покоя. Состояние покоя в СТП будет удерживаться.
Как только в состоянии покоя модуль сигнала о проекции суммы активных сил превысит модуль сигнала о силе трения страгивания, сигнал на втором выходе ФТП (1) примет значение логического «0» и, соответственно, сигнал на выходе блока (2) «И» примет значение логического «О». Ключ коммутатора (3) передаст на выход коммутатора сигнал о силе трения движения. Состояние покоя в СТП снимется. Алгебраическая сумма сигналов проекции суммы активных сил и силы трения движения в первый момент времени будет (по модулю) не меньше, чем алгебраическая сумма сигналов о силах трения страгивания и проекции суммы активных сил, вызвавшей выход из состояния покоя. В связи с этим в первый момент времени после выхода из состояния покоя сигнал об ускорении на выходе БОУ (5) будет ненулевым, интегратор (6) сформирует сигнал об ненулевой скорости, и нуль-орган (4) выдаст сигнал с уровнем логического «О». Поскольку в первый (после выхода из состояния покоя) момент времени происходит разгон (знаки сигналов об ускорении и скорости совпадают), на выходе ФППИ (8) также сформируется сигнал с уровнем логического «0». Предпосылки для возврата в состояние покоя не возникнет.
Таким образом, в первом варианте реализации СТП обеспечивается устойчивый переход из состояния движения и обратно, а также устойчивое удержание СТП в состоянии покоя. При этом выполняемые СТП операции соответствуют описанным для первого независимого варианта способа, т.е. обеспечивается единство изобретения. Поэтому, по мнению заявителя, указанные процессы осуществления действий в данном варианте способа производятся над материальными объектами с помощью материальных средств.
Во втором предлагаемом варианте реализации СТП (фиг. 2) в состоянии движения сигнал на первый выход СТП подается с выхода интегратора (6) через второй коммутатор (12). При этом, пока сигнал о скорости остается ненулевым, с выхода нуль-органа (4) на вход управления коммутатора (3) выдается сигнал с уровнем логического «О». Соответственно на выход коммутатора (3) передается сигнал о трении движения. Сигнал пропорциональный ускорению рассчитывается аналогично описанному для первого варианта СТП в БОУ (5). Формирователь (1) трения покоя может быть выполнен как в прототипе, при этом формирователь (17) удерживающей силы может быть исполнен и так, как изображено на фиг. б) 5. Формирователь упреждения для данного варианта представляет собой соединенные, как это было описано выше, первый блок (13) задержки, второй блок (14) задержки, первый сумматор (15), второй сумматор (10) и блок (11) определения несовпадения знаков с учетом совокупности связей между ними. Вход БЗ1 (13), являющийся входом формирователя упреждения, соединен с выходом интегратора (6). Выход БОНЗ (11), являющийся выходом формирователя упреждения, соединен со вторым входом интегратора (6) и входом управления второго коммутатора (12). В состоянии движения сигнал с выхода интегратора (6) поступает на вход первого блока (13) задержки. Задержанное значение сигнала о моделируемой скорости, соответствующее некоторой предыдущей величине, передается на вход второго блока (14) задержки и вторые входы первого и второго сумматоров и БОНЗ. Задержанное на некоторую величину необязательно равную задержке БЗ1 (13) значение скорости с выхода БЗ2 (14) поступает на вход первого сумматора (15), где вычитается из скорости, полученной с БЗ1 (13) на первый вход первого сумматора (15). На выходе первого сумматора получается изменение скорости за время задержки в БЗ2 (14). Эта величина поступает на первый вход второго сумматора (10). Там она суммируется со значением скорости, поступившей на второй вход второго сумматора (10) с выхода первого блока (13) задержки. При равенстве временных задержек в БЗ1 (13) и БЗ2 (14) на выходе второго сумматора (10) получится оценка ожидаемой скорости на текущий момент времени. Если временные задержки неравны между собой (например, задача решается с переменным шагом), это может быть учтено масштабирующим коэффициентом на втором входе второго сумматора (10). Таким образом, на первый вход блока (11) определения несовпадения знаков поступает сигнал об ожидаемой скорости, а на его второй вход сигнал о предшествующем значении скорости. БОНЗ (11) проверяет, являются ли знаки этих скоростей противоположными (например, что произведение скоростей или их сигнатур отрицательно) и выдает на свой выход сигнал с логическим уровнем «1» при выполнении этого условия.
Если условие изменения знака скорости выработано и на выходе формирователя упреждения появился сигнал UСЗ с уровнем логической «1», по его переднему фронту происходит сброс интегратора (6) в нуль и перевод ключа второго коммутатора (12) в нулевое (заземленное) положение. Нуль-орган (4) формирует на своем выходе сигнал с логическим уровнем «1». Первый коммутатор (3) подключает к своему выходу сигнал, соответствующий трению покоя. Описанные выше операции соответствуют указанному для второго независимого варианта способа «для выработки признака состояния покоя сначала по признаку несовпадения знаков ожидаемой на текущий момент времени и предшествующей скоростей вырабатывают логическую команду на обнуление моделируемой скорости и используют эту логическую команду также для принудительного удержания в нуле до следующего такта вычислений значения используемой для выработки признака наличия состояния покоя скорости».
Если сигнал пропорциональный модулю трения страгивания больше сигнал пропорционального модулю проекции суммы активных сил, сигнал пропорциональный силе трения покоя будет равен для принятой методики расчета сигналу пропорциональному проекции суммы активных сил (противонаправленность учитывается в БОУ). В этом случае сигнал пропорциональный движущей силе в блоке (5) определения ускорения станет равным нулю. Сигнал пропорциональный ускорению обнулится. Интеграл от сигнала пропорционального ускорению при нулевых начальных условиях останется нулевой величиной. Состояние покоя в СТП сформируется. В состоянии покоя по истечении времени равного задержке БЗ1 (13) сигнал на выходе формирователя упреждения примет значение логического «О» (при нулевом значении скорости на выходе БЗ1 (10) признак несовпадения знаков не формируется). Ключ второго коммутатора (12) передаст на его выход сигнал с его первого входа, на который поступает сигнал с выхода интегратора (6). Но поскольку сигнал пропорциональный скорости на выходе интегратора (6) остается нулевым, нуль-орган (4) продолжит формировать выходной сигнал с уровнем логической «1». Когда сигнал пропорциональный модулю проекции суммы активных сил превысит сигнал пропорциональный модулю силы трения страгивания, в БОУ (5) сигнал пропорциональный движущей силе станет ненулевым, на первый вход интегратора (6) поступит сигнал пропорциональный ненулевому ускорению, сигнал пропорциональный скорости на выходе второго коммутатора (12) станет ненулевым, и выходной сигнал НО (4) примет значение логического «0». Выход первого коммутатора (3) переключится на его второй вход, куда поступает сигнал пропорциональный трению движения. Так как формирователь упреждения не сможет выработать сразу же признак несовпадения знаков, произойдет переход СТП в состояние движения.
Таким образом, второй вариант реализации симулятора трения покоя также позволяет обеспечить устойчивый переход из одного состояния СТП в другое и обратно, а также устойчиво поддерживать состояние покоя. Этот вариант исполнения также наиболее просто может быть реализован с использованием аналоговой элементной базы, т.к. все элементы, включая блоки задержки, имеют аналоговые варианты исполнения. При этом времена задержек в БЗ1 и БЗ2 не требуют согласования с шагом решения задачи, а расчетное время упреждения может быть сформировано с учетом зависимости (2). Реализуемые в описанном варианте устройства операции аналогичны описанным во втором независимом варианте способа, что соответствует единству изобретения. Поэтому, по мнению заявителя, указанные процессы осуществления действий и в данном варианте способа производятся над материальными объектами с помощью материальных средств.
В третьем варианте СТП в состоянии движения сигнал с выхода блока (5) определения ускорения поступает на вход первого блока (13) задержки. Задержанный на такт этот сигнал приходит на первый вход накапливающего сумматора (16) («для симуляции интегрирования ускорения используют суммирование с накоплением»). На второй вход НС (16) поступает задержанное на такт во втором блоке (14) задержки значение сигнала пропорционального скорости. С учетом того, что коэффициент по первому входу НС (16) пропорционален шагу решения задачи, сигнал на выходе НС (16) будет соответствовать текущей моделируемой скорости. С выхода накапливающего сумматора (16) через первый вход второго коммутатора (12) сигнал пропорциональный текущей скорости приходит на входы нуль-органа (4), БЗ2 (14) и второй вход блока (11) определения несовпадения знаков. В состоянии движения, если не предпринять специальных мер, моделируемая скорость практически всегда имеет ненулевое значение [6]. Поэтому на выходе НО (4) сигнал будет иметь уровень логического «0». Поступая на вход управления (третий) первого коммутатора (3), он обеспечит прохождение сигнала со второго входа первого коммутатора (3) на его выход. Как уже указывалось, на второй вход извне приходит сигнал пропорциональный трению движения. Поэтому на блок (5) определения ускорения поступают сигналы пропорциональные силе трения движения и проекции суммы активных сил, которые в общем случае необязательно равны друг другу. С выхода второго блока (14) задержки на первый вход БОНЗ (11) поступает задержанное (предыдущее) значение сигнала пропорционального скорости. Аналогично тому, как это было описано для второго варианта СТП, БОНЗ (11) формирует признак изменения знака скорости движения. В этом варианте СТП формирователь упреждения образуют второй блок (14) задержки и блок (11) определения несовпадения знака (вход БЗ2 (14) и его выход могут рассматриваться как вход и первый выход ФУ, а выход БОНЗ (11)- как второй выход ФУ, при этом второй вход БОНЗ (11) считается присоединенным ко входу БЗ2 (14)). Если знаки сигналов пропорциональных текущей и предыдущей скорости совпадают, на выходе БОНЗ (11) будет сигнал, соответствующий логическому «0», при котором второй коммутатор (12) остается в положении, соответствующем состоянию движения.
Когда знаки сигналов пропорциональных текущей и предшествующей скорости станут противоположными, то есть между тактами сигнал пропорциональный скорости должен был пройти нулевое значение, блок (11) определения несовпадения знаков вырабатывает сигнал с уровнем логической «1». Это приводит к тому, что на выходе второго коммутатора (12) устанавливается нулевое значение. При этом выход накапливающего сумматора (16) отключается от первого выхода СТП. Так как на входе нуль-органа (4) имеет место нулевое значение, значение сигнала на его выходе принимает уровень логической «1» (также как, если бы в момент опроса нулевое значение было сформировано на выходе накапливающего сумматора (16)). Первый коммутатор (3) переходит в режим передачи на свой выход сигнала о трении покоя. Поскольку НС (16) в этом такте вычислений уже отключен от выхода СТП, изменение сигнала на его выходе не может повлиять на изменение состояния СТП. Для третьего независимого варианта способа соответствующие операции описывались как «сначала вырабатывают логическую команду на обнуление моделируемой скорости по признаку несовпадения знаков ожидаемой на текущий момент времени и предшествующей скоростей и используют эту логическую команду для принудительной замены накопленной величины скорости нулевым значением, а для формирования признака состояния покоя используется обнуленный в результате этого сигнал скорости».
Рассмотрим в состоянии покоя для примера работу ФТП (1), в котором выходной сигнал задатчика (18) трения страгивания зависит как минимум от направления движения, а формирователь (17) удерживающей силы выполнен в форме, приведенной на фиг. б) 5. Пусть в следующем такте после перехода на ветвь расчета, соответствующую состоянию покоя на вход ФТП (1) придет сигнал о проекции суммы активных сил. В простейшем случае это может быть числом со знаком, в более сложных вариантах многомерная величина, учитывающая, например, кроме собственно силы координаты пятна контакта и направление движения в его плоскости. Этот сигнал со входа формирователя (1) трения покоя приходит на вход ЗТС (18) и второй вход ФУС (17). В ЗТС (18) для области возможных значений поступающего сигнала имеется массив или аналитическая зависимость для расчета соответствующих откликов на направление проекции суммы активных сил. Поэтому на выход ЗТС выдается численное значение модуля силы страгивания. Оно поступает на первый вход формирователя (17) удерживающей силы. Со второго входа ФУС (17) из массива поступивших данных выделяется число со знаком (в более общем случае компоненты вектора), характеризующее проекцию суммы активных сил на предполагаемое направление движения. Эта величина поступает на сигнальный вход регулируемого ограничителя (24). На управляющий вход РО (24) поступает сигнал об уровне ограничения с первого входа ФУС (17). При необходимости этой величине может быть присвоен знак сигнала, подаваемого на сигнальный вход, либо она может быть проинвертирована (организовано симметричное ограничение). Таким образом, на выходе РО (24) будет сигнал со знаком проекции суммы активных сил, а уровень его будет равен меньшему из модулей сигналов на его входах. Следствием этого будет то, что пока сохраняется состояние покоя, сигнал пропорциональный ускорению на выходе БОУ (5) будет нулевым. Так как после принудительного перевода выходного сигнала второго коммутатора (12) в нуль в следующем такте вычислений нулевым также станет и выходной сигнал с выхода второго блока (14) задержки. Следствием этого, во-первых, будет обнуление сигнала на выходе НС (16), так как к этому времени на выходе первого блока (13) задержки также будет нулевой сигнал, а во-вторых, на выходе БОНЗ (11) сигнал примет значение логического «О». Поэтому, несмотря на то, что выход второго коммутатора (12) вновь будет соединен с выходом накапливающего сумматора (16), его значение останется нулевым, выход НО (4) удержит значение логической «1». Состояние покоя будет удерживаться, пока сигнал пропорциональный модулю проекции суммы активных сил не превысит сигнал пропорциональный модулю силы страгивания.
Когда сигнал пропорциональный модулю проекции суммы активных сил превысит сигнал пропорциональный модулю силы трения страгивания, равенство сигналов на входах БУО (5) нарушится. Сигнал пропорциональный ускорению станет ненулевым. Из-за того, что сигнал пропорциональный скорости станет отличаться от нуля, сигнал на выходе нуль-органа примет значение логического «0». Первый коммутатор (3) станет опять пропускать на свой выход сигнал, соответствующий силе трения движения. Состояние движения в СТП восстановится.
Как видно, и в третьем варианте реализации СТП обеспечивается устойчивый переход из состояния движения в состояние покоя и обратно, а также устойчивое удержание нулевой скорости в состоянии покоя. Паразитные колебания из-за смены направления силы трения не возникают. Данную реализацию предпочтительно использовать, когда применяются вычислительные устройства, работающие с фиксированным шагом решения задачи. Реализуемые в описанном варианте устройства операции аналогичны описанным в третьем независимом варианте способа, что соответствует единству изобретения. Поэтому, по мнению заявителя, указанные процессы осуществления действий и в данном варианте способа производятся над материальными объектами с помощью материальных средств.
Вышеописанное показывает, что предлагаемые варианты способов и устройств являются технически реализуемыми и новыми. В процессе симуляции сигнал пропорциональный силе трения не ведет себя как активная сила, при этом симуляция сигнала пропорционального трению покоя производится с осуществлением остановки и без паразитных колебаний. То есть отражается сущность физического процесса. Возможна реализация на цифровой и аналоговой элементной базе. Возможно использование технических решений в системах реального времени. Поскольку за основу принят статический принцип симуляции силы трения, не требуется увеличения (по крайней мере существенного) вычислительных возможностей и требуемого объема памяти вычислительных устройств.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. Краснова С.А., Уткин В.А. «Каскадный синтез наблюдателей состояния динамических систем», М., «Наука», 2006 г.
2. Малафеева А.А., «Устройство для управления электроприводом с фрикционной нагрузкой)), патент РФ на изобретение №2079961, МПК Н02Р 5/06, 1992 г.
3. «Открытая физика 2.6», часть I, глава 1 «Механика», параграф 1.13 «Сила трения».
http://www.physics.ru/courses/op25part1/content/chapterl/section/paragraph13/the ory.html#.V-umt02a21h
4. Монастыршин Г.И. «Математическое моделирование сухого трения» // «Автоматика и телемеханика», 1958 г., том 19, выпуск 12, стр. 1091-1106.
5. «Блок сухого и вязкого трения (Coulomb and Viscous Friction)», Студопедия, https://studopedia.ru/20_27818_blok-suhogo-i-vyazkogo-treniya-Coulomb-and-Viscous-Friction.html
6. Серебренный B.B., Бошляков А.А., Огородник А.И. «Математическая модель исполнительных модулей захватных устройств роботов» // Вестник БГТУ им. В.Г. Шухова. 2019 г., №6, стр. 123-135.
7. Воронин С.Г. «Электропривод летательных аппаратов: Учебно-методический комплекс». - Offline версия 1.0. - Челябинск, 1995-2011. Глава 9, Следящие электроприводы, Параграф 9.5. http://model.exponenta.ru/epivod/glv_090.htm.
8. Шендерович П.Б., «Устройство для моделирования нелинейности типа «сухое трение»», а.с. №334575 на изобретение СССР, м. кл. G06g 7/48, 1970 г.
9. «Устройство для моделирования сухого трения», а.с. №1091186 на изобретение СССР, м. кл. G06G 7/25, 1982 г.
10. Система численно-математического моделирования MatLab Stateflow - Simulink. Демонстрация трения скольжения в StateFlow, http://bourabai.ru/cm/friction.htm.
11. Mathworks, Help Center, Signal threshold, https://www.mathworks.com/help/simulink/gui/signal-threshold.html.
12. Лушников Б.В. «Компьютерное моделирование динамики элемента сухого некулонова трения» // «Известия Самарского научного центра Российской академии наук», т. 12, №1(2), 2010, стр. 439-444.
13. Накапливающий сумматор, https://life-prog.ru/view_automati.php?id=16
14. Коротков О.В., Жемеров В.И., Щеглова Л.А. «Способ управления электроприводом и устройство для его реализации (варианты)», патент на изобретение РФ №2628757, МПК Н02Р 23/00, Н02Р 25/00, 2016 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ (ВАРИАНТЫ) | 2016 |
|
RU2628757C1 |
| УСТРОЙСТВО для МОДЕЛИРОВАНИЯ ХАРАКТЕРИСТИК | 1972 |
|
SU324636A1 |
| Устройство для моделирования нелинейности типа сухое трение | 1980 |
|
SU934501A1 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА ОБНАРУЖЕНИЯ И САМОНАВЕДЕНИЯ | 2010 |
|
RU2439608C1 |
| Телевизионное следящее устройство | 1982 |
|
SU1019672A2 |
| Устройство для воспроизведения характеристики типа "сухое трение | 1985 |
|
SU1316010A1 |
| Устройство для программного управления | 1983 |
|
SU1160367A1 |
| Устройство для регулирования частоты вращения асинхронного электродвигателя | 1990 |
|
SU1758823A1 |
| Система позиционирования с двухзонным регулированием скорости электропривода | 1991 |
|
SU1798765A1 |
| СПОСОБ ФОРМИРОВАНИЯ ЛИНЕАРИЗИРОВАННОГО СИГНАЛА НА ВРАЩАЮЩЕЙСЯ ПО УГЛУ КРЕНА РАКЕТЕ. ЛИНЕАРИЗАТОР СИГНАЛА. ПЕРЕКЛЮЧАЕМЫЙ ЛИНЕАРИЗАТОР СИГНАЛА. СПОСОБ ИНТЕГРИРОВАНИЯ ДЛЯ ФОРМИРОВАНИЯ ЛИНЕАРИЗИРОВАННОГО СИГНАЛА И ЦИФРОВОЙ ИНТЕГРАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2549231C1 |
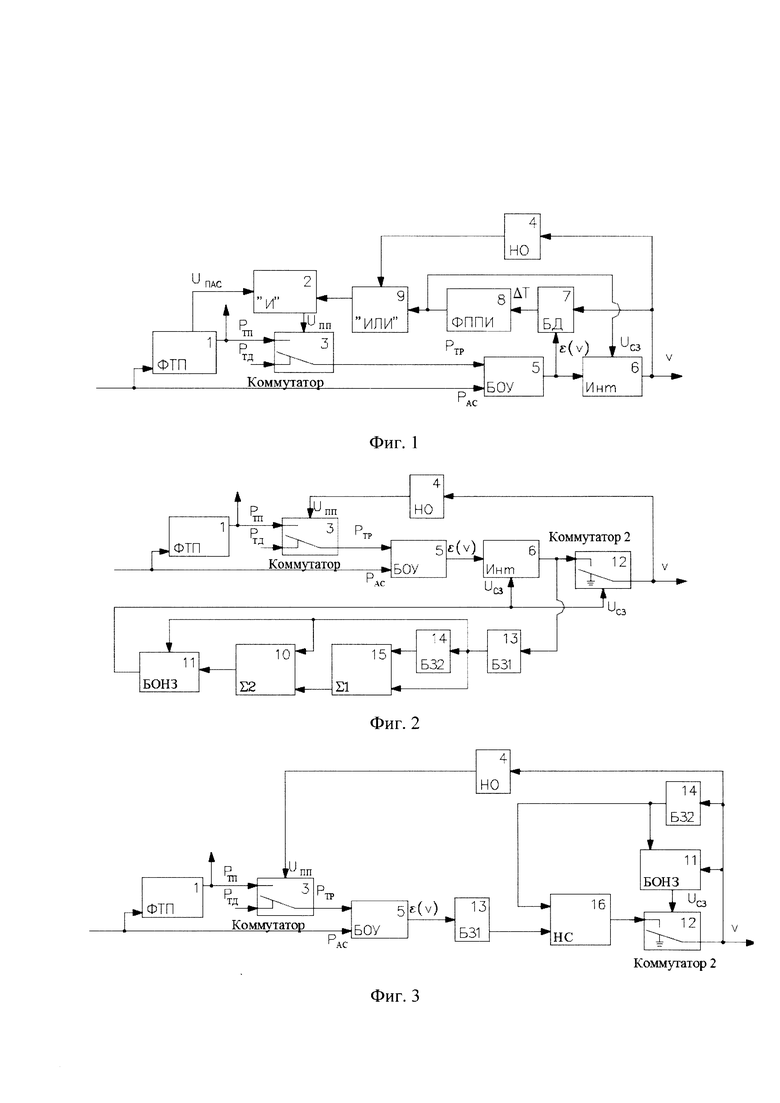
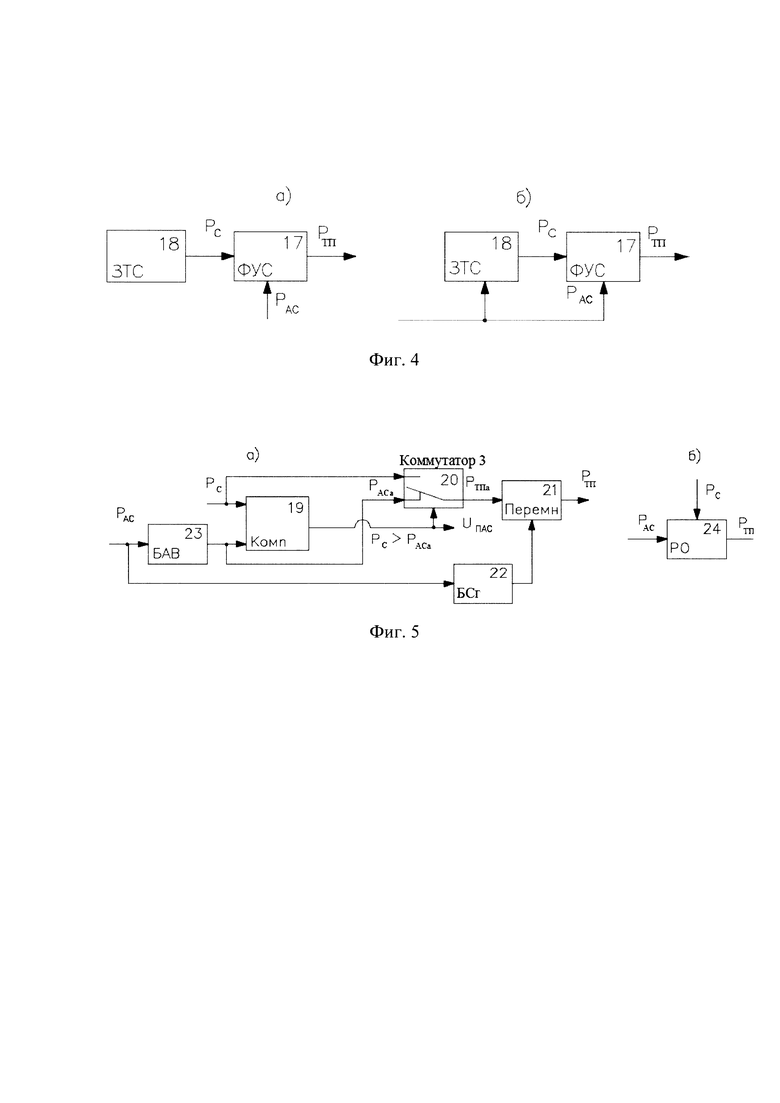
Предлагаемые технические решения относятся к области управляемых реверсируемых или работающих с остановками систем, одной из возмущающих сил, воздействующих на которые, является трение и в процессе синтеза управления осуществляется его симуляционное моделирование. Техническим результатом является повышение точности соответствия поведения модели реальному физическому процессу в динамической системе без повышения порядка дифференциальных уравнений, используемых моделью, а также появляется возможность решения задачи с использованием вычислительных средств низкой производительности в реальном времени и аналоговых вычислителей. Заявлен способ симуляции трения покоя, в котором для получения сигнала движущей силы к сигналу проекции суммы активных сил на направление движения (ожидаемое направление движения) прибавляют сигнал силы трения, результат делят на значение массы движущихся частей, получая значение ускорения, путем интегрирования сигнала ускорения получают значение скорости, в случае достижения моделируемой скоростью нуля формируют признак наличия состояния покоя взаимоисключающий с признаком наличия состояния движения и логическую команду на обнуление моделируемой скорости путем сброса в нуль интегратора при переходе от состояния движения к состоянию покоя, причем в состоянии движения используют в качестве сигнала силы трения значение силы трения движения, а при наличии признака состояния покоя применяют для этого величину силы трения покоя, абсолютную величину которой формируют как меньшее по модулю из значений силы трения страгивания и проекции суммы активных сил в соответствующем направлении. При этом в предлагаемых технических решениях признак состояния покоя вырабатывают с опережением к моменту фактического обнуления скорости. Предложено три базовых варианта получения команд на сброс интегратора и формирования признака состояния покоя, в том числе учитывающих взаимонаправленность движущей силы и скорости и возможность осуществления интегрирования с использованием накапливающего сумматора. Для реализации каждого из базовых вариантов симуляции предложено соответствующее устройство. 6 н. и 11 з.п. ф-лы, 5 ил.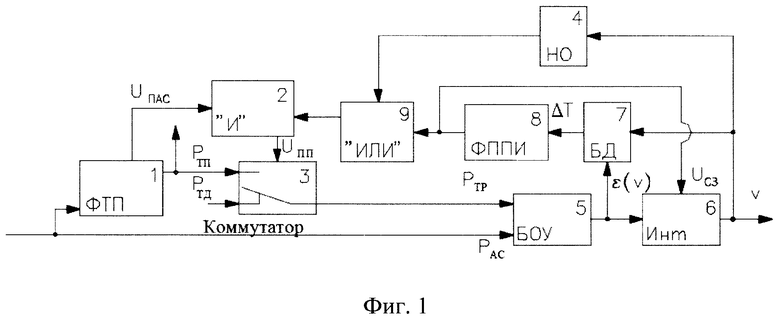
1. Симулятор трения покоя, содержащий нуль-орган, последовательно соединенные формирователь трения покоя, коммутатор, блок определения ускорения, второй вход которого соединен с первым входом симулятора трения покоя, и выполненный с возможностью сброса интегратор, первый выход которого соединен с первым выходом симулятора трения покоя, причем вход формирователя трения покоя соединен со вторым входом блока определения ускорения, второй вход коммутатора соединен со вторым входом симулятора трения покоя, отличающийся тем, что в него введены последовательно соединенные формирователь упреждения, блок «ИЛИ» и блок «И», выход которого соединен с третьим входом коммутатора, при этом первый вход формирователя упреждения соединен с выходом интегратора и входом нуль-органа, второй вход формирователя упреждения соединен с выходом блока определения ускорения, второй вход интегратора соединен с выходом формирователь упреждения, второй вход блока «ИЛИ» соединен с выходом нуль-органа, а второй вход блока «И» соединен со вторым выходом формирователя трения покоя, первый выход которого соединен со вторым выходом симулятора трения покоя.
2. Симулятор трения покоя, содержащий нуль-орган и последовательно соединенные формирователь трения покоя, первый коммутатор, блок определения ускорения, второй вход которого соединен с первым входом симулятора трения покоя, и выполненный с возможностью сброса интегратор, причем вход формирователя трения покоя соединен со вторым входом блока определения ускорения, второй вход первого коммутатора соединен со вторым входом симулятора трения покоя, а третий его вход соединен с выходом нуль-органа, отличающийся тем, что в него введены второй коммутатор и формирователь упреждения, первый вход второго коммутатора соединен с выходом интегратора и входом формирователя упреждения, выход которого соединен со вторыми входами интегратора и второго коммутатора, при этом выход второго коммутатора соединен с первым выходом симулятора трения покоя и входом нуль-органа, а выход формирователя трения покоя соединен со вторым выходом симулятора трения покоя.
3. Симулятор трения покоя, содержащий нуль-орган и последовательно соединенные формирователь трения покоя, первый коммутатор, блок определения ускорения, второй вход которого соединен с первым входом симулятора трения покоя, причем вход формирователя трения покоя соединен со вторым входом блока определения ускорения, второй вход первого коммутатора соединен со вторым входом симулятора трения покоя, а третий его вход соединен с выходом нуль-органа, отличающийся тем, что в него введены последовательно соединенные первый блок задержки, накапливающий сумматор, второй коммутатор и формирователь упреждения, причем выход второго коммутатора соединен с первым выходом симулятора трения покоя и входом нуль-органа, при этом второй вход накапливающего сумматора соединен с первым выходом формирователя упреждения, вход первого блока задержки соединен с выходом блока определения ускорения, выход формирователя трения покоя соединен со вторым выходом симулятора трения покоя, а второй выход формирователя упреждения соединен со вторым входом второго коммутатора.
4. Симулятор трения покоя по п. 1, отличающийся тем, что формирователь трения покоя содержит последовательно соединенные задатчик трения страгивания и формирователь удерживающей силы, второй вход которого соединен со входом формирователя трения покоя, первый выход связан с первым выходом формирователя трения покоя, а второй выход со вторым выходом формирователя трения покоя.
5. Симулятор трения покоя по п. 1, отличающийся тем, что формирователь трения покоя содержит последовательно соединенные задатчик трения страгивания и формирователь удерживающей силы, второй вход которого соединен со входом формирователя трения покоя, первый выход связан с первым выходом формирователя трения покоя, а второй выход - со вторым выходом формирователя трения покоя, при этом формирователь удерживающей силы содержит блок сигнатуры и последовательно соединенные блок абсолютной величины, компаратор, коммутатор и перемножитель, второй вход перемножителя соединен с выходом блока сигнатуры, а выход связан с первым выходом формирователя удерживающей силы, второй вход компаратора соединен со вторым входом коммутатора и первым входом формирователя удерживающей силы, вход блока абсолютной величины соединен со входом блока сигнатуры и вторым входом формирователя удерживающей силы, выход блока абсолютной величины также соединен с третьим входом компаратора, чей выход также соединен со вторым выходом формирователя удерживающей силы.
6. Симулятор трения покоя, по п. 1, отличающийся тем, что формирователь упреждения выполнен в виде последовательно соединенных блока деления и формирователя признака попадания в интервал, при этом первый вход блока деления соединен с первым входом формирователя упреждения, второй его вход соединен со вторым входом формирователя упреждения, а выход формирователя признака попадания в интервал соединен с выходом формирователь упреждения.
7. Симулятор трения покоя по п. 2, отличающийся тем, что формирователь упреждения содержит последовательно соединенные первый и второй блоки задержки, первый и второй сумматоры и блок определения несовпадения знаков, при этом вход первого блока задержки соединен со входом формирователя упреждения, а его выход также соединен со вторыми входами первого и второго сумматоров и блока определения несовпадения знаков, выход которого соединен с выходом формирователя упреждения.
8. Симулятор трения покоя по п. 3, отличающийся тем, что формирователь упреждения содержит последовательно соединенные второй блок задержки и блок определения несовпадения знаков, вход второго блока задержки соединен с первым входом формирователя упреждения и вторым входом блока определения несовпадения знаков, выход второго блока задержки соединен с первым выходом формирователя упреждения, а выход блока определения несовпадения знаков соединен со вторым выходом формирователя упреждения.
9. Симулятор трения покоя по любому из пп. 1-3, отличающийся тем, что формирователь трения покоя содержит последовательно соединенные задатчик трения страгивания и формирователь удерживающей силы, второй вход которого соединен со входом формирователя трения покоя, первый выход связан с первым выходом формирователя трения покоя.
10. Симулятор трения покоя по п. 2 или 3, отличающийся тем, что формирователь трения покоя содержит последовательно соединенные задатчик трения страгивания и формирователь удерживающей силы, второй вход которого соединен со входом формирователя трения покоя, первый выход связан с первым выходом формирователя трения покоя, при этом формирователь удерживающей силы представляет собой регулируемый ограничитель, первый вход которого соединен с первым входом формирователя удерживающей силы, второй вход - со вторым его входом, а выход - с выходом формирователя удерживающей силы.
11. Способ симуляции трения покоя, реализуемый посредством устройства по п. 1, в котором для получения сигнала движущей силы к сигналу проекции суммы активных сил на направление движения (ожидаемое направление движения) прибавляют сигнал силы трения, результат делят на значение массы движущихся частей, получая значение ускорения, путем интегрирования сигнала ускорения получают значение скорости, в случае достижения моделируемой скоростью нуля формируют признак наличия состояния покоя, взаимоисключающий с признаком наличия состояния движения, и логическую команду на обнуление моделируемой скорости путем сброса в нуль интегратора при переходе от состояния движения к состоянию покоя, причем в состоянии движения используют в качестве сигнала силы трения значение силы трения движения, а при наличии признака состояния покоя применяют для этого величину силы трения покоя, абсолютную величину которой формируют как меньшее по модулю из значений силы трения страгивания и проекции суммы активных сил в соответствующем направлении, отличающийся тем, что признак состояния покоя вырабатывают также и с опережением к моменту фактического обнуления сигнала скорости, используя предсказание ее обнуления, и при этом учитывают, что движущая сила (или ускорение) направлена в этот момент времени против скорости, а модуль проекции суммы активных сил на направление движения не превышает модуля силы страгивания в соответствующем направлении.
12. Способ симуляции трения покоя, реализуемый посредством устройства по п. 2, в котором для получения сигнала движущей силы к сигналу проекции суммы активных сил на направление движения (ожидаемое направление движения) прибавляют сигнал силы трения, результат делят на значение массы движущихся частей, получая значение ускорения, путем интегрирования сигнала ускорения получают значение скорости, формируют признак наличия состояния покоя, взаимоисключающий с признаком наличия состояния движения, и логическую команду на обнуление моделируемой скорости путем сброса в нуль интегратора при переходе от состояния движения к состоянию покоя, причем в состоянии движения используют в качестве сигнала силы трения значение силы трения движения, а при наличии признака состояния покоя применяют для этого величину силы трения покоя, абсолютную величину которой формируют как меньшее по модулю из значений силы трения страгивания и проекции суммы активных сил в соответствующем направлении, отличающийся тем, что для выработки признака состояния покоя сначала по признаку несовпадения знаков ожидаемой на текущий момент времени и предшествующей скоростей вырабатывают логическую команду на обнуление моделируемой скорости и используют эту логическую команду также для принудительного удержания в нуле до следующего такта вычислений значения используемой для выработки признака наличия состояния покоя скорости.
13. Способ симуляции трения покоя, реализуемый посредством устройства по п. 3, в котором для получения сигнала движущей силы к сигналу проекции суммы активных сил на направление движения (ожидаемое направление движения) прибавляют сигнал силы трения, результат делят на значение массы движущихся частей, получая величину ускорения, путем интегрирования сигнала ускорения получают значение скорости, формируют признак наличия состояния покоя, взаимоисключающий с признаком наличия состояния движения, и логическую команду на обнуление моделируемой скорости при переходе от состояния движения к состоянию покоя, причем в состоянии движения используют в качестве сигнала силы трения значение силы трения движения, а при наличии признака состояния покоя применяют для этого величину силы трения покоя, абсолютную величину которой формируют как меньшее по модулю из значений силы трения страгивания и проекции суммы активных сил в соответствующем направлении, отличающийся тем, что для симуляции интегрирования ускорения используют суммирование с накоплением, при этом сначала вырабатывают логическую команду на обнуление моделируемой скорости по признаку несовпадения знаков ожидаемой на текущий момент времени и предшествующей скоростей и используют эту логическую команду для принудительной замены накопленной величины скорости нулевым значением, а для формирования признака состояния покоя используется обнуленный в результате этого сигнал скорости.
14. Способ симуляции трения покоя по п. 11, отличающийся тем, что для предсказания возможного обнуления сигнала скорости исключают из рассмотрения нулевые значения ускорения, делят сигнал скорости на сигнал ускорения и проверяют, что частное от деления попало в заданный интервал значений, попадание частного в этот интервал используют в качестве логического признака ожидаемого обнуления моделируемой скорости движения.
15. Способ симуляции трения покоя по п. 12, отличающийся тем, что для формирования признака несовпадения знаков ожидаемой на текущий момент времени и предшествующей скоростей определяют изменение сигнала скорости на предшествующем интервале движения и находят экстраполированное значение сигнала скорости для конца следующего интервала движения, при этом экстраполированное значение скорости используют как ожидаемую величину скорости.
16. Способ симуляции трения покоя по п. 13, отличающийся тем, что сигнал ускорения выдается на накопление с задержкой.
17. Способ симуляции трения покоя по п. 13, отличающийся тем, что принудительная замена накопленной величины скорости нулевым значением производится за счет присвоения нулевого значения сигналу перед выполнением очередной операции накопления.
| Устройство для моделирования силы трения | 1987 |
|
SU1543427A1 |
| Устройство для воспроизведения зависимости силы трения от скорости и предварительного смещения пар трения | 1986 |
|
SU1374256A1 |
| Устройство для моделирования механических систем с трением (его варианты) | 1981 |
|
SU1015400A1 |
| US 20070150156 A1, 28.06.2007 | |||
| US 8660764 B2, 25.02.2014. | |||

