Изобретение относится к области систем автоматического управления электромеханическими объектами, в частности объектами с переменными параметрами быстродействия.
Из уровня техники известна самонастраивающаяся система управления с градиентной адаптацией регулятора состояния, содержащая входной сумматор, объект управления, блок эталонной модели, регулятор состояния, отличающаяся тем, что она дополнительно содержит выходной сумматор и блок алгоритма настройки, причем выход входного сумматора подключен к входам объекта управления и блока эталонной модели, выходы которых подключены соответственно к отрицательному и положительному входам выходного сумматора, выход которого через блок алгоритма настройки соединен с функциональным входом регулятора состояния, выход которого подключен к отрицательному входу входного сумматора, кроме того, от одного до N выходов состояния объекта управления подключены к соответствующим от одного до N входам регулятора состояния, (патент RU 2574283, С1, 2014 г.)
В результате анализа известного способа необходимо отметить, что получаемые значения параметров системы управления могут зависеть от характера изменения во времени заданного значения на входе в систему и действующих возмущений, особенно при наличии нелинейных элементов в структуре системы управления. В частности, при нелинейной зависимости скорости исполнительного механизма от входного сигнала на входе в исполнительный механизм результат, полученный при низкочастотных движениях системы с малой скоростью перемещения исполнительного механизма, может оказаться неприемлемым при высокочастотных движениях с высокой скоростью перемещения исполнительного механизма и приводить к потере устойчивости. Так же при применении контура настройки с высоким быстродействием глубина коррекции ограничена из-за риска потери устойчивости, что затрудняет применение прототипа при разбросе динамических свойств исполнительного механизма в несколько раз.
Техническим результатом настоящего изобретения является повышение надежности системы управления путем исключения влияния широкого разброса скоростной характеристики исполнительного механизма на динамические характеристики системы.
Указанный технический результат достигается в способе адаптивного управления исполнительным механизмом согласно которому формируют сигнал управления исполнительным механизмом пропорционально рассогласованию между заданным и измеренным значением регулируемого параметра, при превышении по абсолютной величине рассогласованием заранее выбранного порога определяют скорость изменения заданного значения регулируемого параметра и отношение ее к разности между заданным и измеренным значением регулируемого параметра, если отношение положительное, сравнивают его с заранее выбранным значением, интегрируют полученную разность и пропорционально результату изменяют коэффициент усиления в цепи формирования сигнала управления исполнительным механизмом, а в случае, если отношение отрицательное, снижают коэффициент усиления с заранее выбранным темпом.
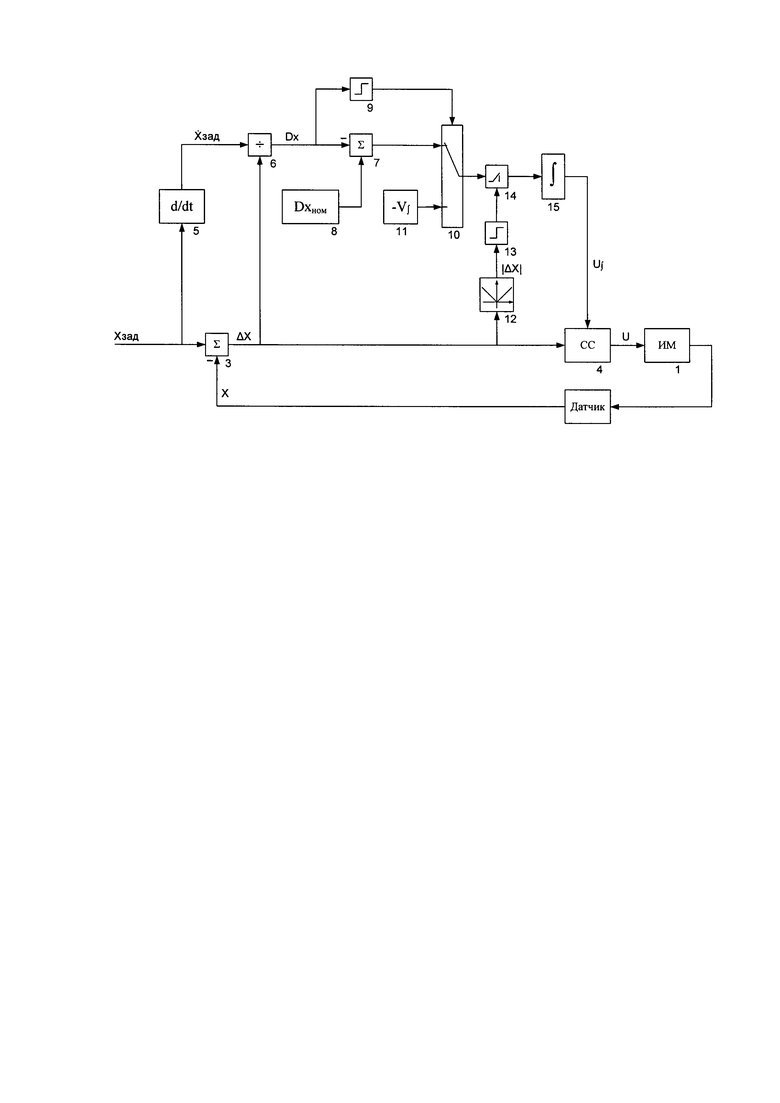
Система, реализующая заявленный способ управления, представлена на фиг. 1 и содержит:
1 - исполнительный механизм,
2 - датчик управляемого параметра X,
3 - сумматор,
4 - следящая система,
5 - блок дифференцирования,
6 - делитель,
7 - сумматор,
8 - задатчик номинального значения добротности системы по скорости управляемого параметра X,
9 - компаратор,
10 - управляемый переключатель,
11 - задатчик скорости снижения накопленного значения интеграла,
12 - выпрямитель,
13 - компаратор,
14 - ключ,
15 - интегратор.
Рассмотрим работу системы для реализации управления по положению дозатора топлива.
Под управляемым параметром X будем понимать положение дозирующего элемента, исполнительный механизм (1) в системе представляет из себя линейный электродвигатель дозатора топлива, сигнал управления U - ток.
Положение X дозатора топлива измеряется датчиком положения 2 и поступает на второй (инвертирующий) вход сумматора 3, на первый вход которого поступает заданное положение дозатора - Хзад.
Сумматор 3 формирует рассогласование между заданным и фактическим положениями дозатора:
ΔХ=Хзад-X.
Следящая система 4 в зависимости от рассогласования ΔХ формирует сигнал управления U на исполнительный механизм 1 дозатора.
Следящая система может быть выполнена в виде статического регулятора с переменным коэффициентом усиления. Начальный (нескорректированный) коэффициент усиления регулятора обозначим как Кном.
Сигнал рассогласования АХ также поступает на второй вход делителя 6 и на вход выпрямителя 12.
Сигнал заданного положения дозатора Хзад также поступает на вход блока дифференцирования 5. Блок дифференцирования 5 формирует сигнал скорости изменения заданного положения  который поступает на первый вход делителя 6, который формирует сигнал оценки фактической добротности системы с астатизмом первого порядка:
который поступает на первый вход делителя 6, который формирует сигнал оценки фактической добротности системы с астатизмом первого порядка:
Сигнал оценки добротности Dx поступает на первый (инвертирующий) вход сумматора 7 и на вход компаратора 9.
На второй вход сумматора 7 поступает сигнал с задатчика 8 номинального значения добротности системы - Dxном.
Сумматор 7 формирует отклонение фактической добротности системы от ее номинального (желаемого) значения:
ΔDx=Dxном - Dx.
Компаратор 9 управляет работой переключателя 10.
К первому входу переключателя 10 подключен выход сумматора 7, к второму входу - выход задатчика 11 скорости снижения накопленного значения интеграла.
При Dx>0 компаратор формирует на своем выходе сигнал логической единицы, в соответствии с которым на выход переключателя 10 поступает сигнал с его первого входа. При Dx<0 компаратор формирует на своем выходе сигнал логического нуля, в соответствии с которым на выход переключателя 10 поступает сигнал с его второго входа.
Выход переключателя 10 через 14 ключ подключен к входу интегратора 15. Выходной сигнал интегратора 15 -  Состоянием ключа управляет сигнал компаратора 13, ко входу которого подключен сигнал с выпрямителя 12.
Состоянием ключа управляет сигнал компаратора 13, ко входу которого подключен сигнал с выпрямителя 12.
Выпрямитель 12 формирует сигнал абсолютного значения рассогласования  . При больше порога срабатывания компаратора происходит его срабатывание и формирование сигнала логической единицы, в соответствии с которым ключ 14 замыкается, и интегратор 15 интегрирует сигнал с переключателя 10. Если меньше порога - компаратор формирует сигнал логического нуля, в соответствии с которым ключ 14 размыкается, и интегрирование прекращается, интегратор 15 остается в состоянии до размыкания ключа.
. При больше порога срабатывания компаратора происходит его срабатывание и формирование сигнала логической единицы, в соответствии с которым ключ 14 замыкается, и интегратор 15 интегрирует сигнал с переключателя 10. Если меньше порога - компаратор формирует сигнал логического нуля, в соответствии с которым ключ 14 размыкается, и интегрирование прекращается, интегратор 15 остается в состоянии до размыкания ключа.
В соответствии с сигналом интегратора 15 следящая система изменяет свой коэффициент усиления, определяющий добротность системы:

Порог срабатывания компаратора 13 определяется из условия возможности точного вычисления добротности системы и составляет порядка 1% от полного хода дозатора.
Для упрощения чтения системы блоки, препятствующие делению на 0 делителем 6 не показаны.
На установившемся режиме заданное положение дозатора равно фактическому, рассогласование на выходе сумматора 3 равно нулю. Сигнал на выходе выпрямителя 12 меньше порога срабатывания компаратора 13, и сигнал на его выходе равен нулю. В соответствии нулевым сигналом компаратора 13 ключ 14 разомкнут, при этом интегратор 15 сохраняет накопленное ранее значение. Начальное значение интегратора единичное:
В соответствии с ним суммарный коэффициент усиления следящей системы равен номинальному:
К=Кном.
При изменении заданного положения дозатора на выходе сумматора 3 формируется рассогласование, согласно которому происходит вычисление добротности системы Dx.
При превышении порога срабатывания компаратора, т.е. когда вычисление оценки Dx достоверно, происходит срабатывание компаратора 13 и замыкание ключа 14. на вход интегратора 15 поступает сигнал с выхода переключателя 10.
Если фактическое значение положения дозатора отстает от заданного, то Dx>0, и система устойчива, при этом можно производить коррекцию суммарного коэффициента усиления следящей системы. В этом случае компаратор 9 производит переключение переключателя 10 и на вход интегратора 15 поступает сигнал сумматора 7.
Если вычисленная оценка добротности системы меньше номинальной, на сумматоре 10 формируется положительный сигнал, интегратор 15 увеличивает свое значение, и в соответствии с (1) возрастает общий коэффициент усиления следящей системы 4. Коэффициент усиления будет увеличиваться до тех пор, пока значения фактической добротности (сформированной блоком 6) не достигнет номинального значения, формируемого задатчиком 8. При этом на выходе сумматора 7 будет нулевой сигнал и интегрирование прекратится.
Если в процессе работы динамические свойства исполнительного механизма изменятся, например, быстродействие возрастет, то оценка добротности превысит номинальную, и на вход интегратора 15 поступит отрицательное значение, что приведет к снижению значения интеграла и общего коэффициента усиления следящей системы 4, установлению добротности на номинальном уровне.
При выходе системы из состояния устойчивости или возникновении колебаний происходит опережение фактическим значением положения дозатора его заданного значения, и оценка Dx становится отрицательной. В этом случае необходимо понизить коэффициент усиления системы. При Dx<0 происходит срабатывание компаратора 9 и на его выходе формируется сигнал логического нуля, в соответствии с которым на вход интегратора 15 подается сигнал с задатчика 11. Интегратор 15 снижает накопленное значение с заданной скоростью. Снижение значения и уменьшение коэффициента усиления следящей системы будет продолжаться до тех пор, пока система не станет устойчивой, и Dx станет больше нуля. Компаратор 9 сформирует на своем выходе сигнал логической единицы, переключатель 10 переключится, и система вернется в исходное состояние.
Таким образом, система управления обеспечивает стабильность динамических характеристик при нестабильных динамических характеристиках исполнительного механизма, обеспечивает устойчивость ее работы.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ИСПОЛНИТЕЛЬНЫМ МЕХАНИЗМОМ ДОЗАТОРА ТОПЛИВА ГАЗОТУРБИННОГО ДВИГАТЕЛЯ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2285140C2 |
| Электрогидравлический следящий привод | 1980 |
|
SU851335A1 |
| Следящая система | 1981 |
|
SU962847A1 |
| Способ регулирования подачи топлива в камеру сгорания газотурбинной установки | 2023 |
|
RU2813715C1 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ С ФОРСАЖНОЙ КАМЕРОЙ СГОРАНИЯ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2634997C2 |
| Следящая система для инерционного объекта | 1984 |
|
SU1232939A1 |
| Нелинейное корректирующее устройство | 1987 |
|
SU1536351A1 |
| Способ управления площадью критического сечения реактивного сопла двухвального двухконтурного газотурбинного двигателя | 2023 |
|
RU2823004C1 |
| Следящий пъезопривод с коррекцией неоднозначной статической характеристики | 1982 |
|
SU1120279A1 |
| Устройство управления процессом формования пленочных материалов | 1989 |
|
SU1671742A1 |
Изобретение относится к области систем автоматического управления электромеханическими объектами, в частности объектами с переменными параметрами быстродействия. Способ адаптивного управления исполнительным механизмом, согласно которому формируют сигнал управления исполнительным механизмом пропорционально рассогласованию между заданным и измеренным значениями регулируемого параметра, при превышении по абсолютной величине рассогласованием заранее выбранного порога определяют скорость изменения заданного значения регулируемого параметра и отношение ее к разности между заданным и измеренным значениями регулируемого параметра, если отношение положительное, сравнивают его с заранее выбранным значением, интегрируют полученную разность и пропорционально результату изменяют коэффициент усиления в цепи формирования сигнала управления исполнительным механизмом, а в случае если отношение отрицательное, снижают коэффициент усиления с заранее выбранным темпом. Техническим результатом настоящего изобретения является повышение надежности системы управления путем исключения влияния широкого разброса скоростной характеристики исполнительного механизма на динамические характеристики системы. 1 ил.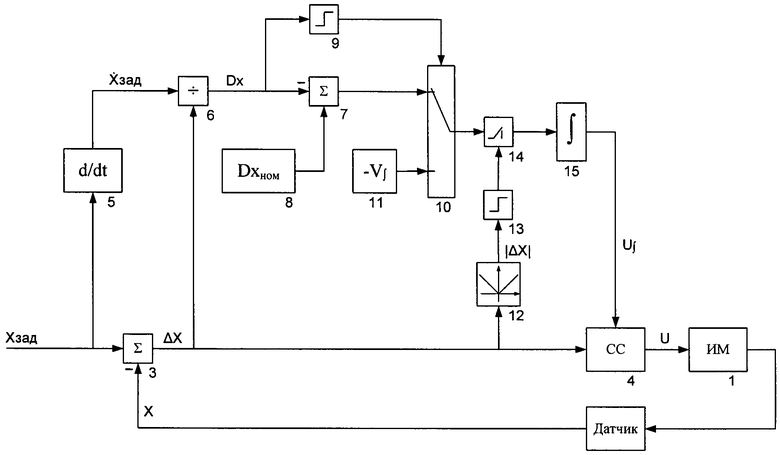
Способ адаптивного управления исполнительным механизмом, согласно которому формируют сигнал управления исполнительным механизмом пропорционально рассогласованию между заданным и измеренным значениями регулируемого параметра, при превышении по абсолютной величине рассогласованием заранее выбранного порога определяют скорость изменения заданного значения регулируемого параметра и отношение ее к разности между заданным и измеренным значениями регулируемого параметра, если отношение положительное, сравнивают его с заранее выбранным значением, интегрируют полученную разность и пропорционально результату изменяют коэффициент усиления в цепи формирования сигнала управления исполнительным механизмом, а в случае если отношение отрицательное, снижают коэффициент усиления с заранее выбранным темпом.
| СПОСОБ АДАПТИВНОГО УПРАВЛЕНИЯ ПРОЦЕССОМ СМЕШЕНИЯ ЖИДКОСТЕЙ | 1994 |
|
RU2133493C1 |
| Адаптивная система управления | 1977 |
|
SU634234A1 |
| САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА УПРАВЛЕНИЯ С ГРАДИЕНТНОЙ АДАПТАЦИЕЙ РЕГУЛЯТОРА СОСТОЯНИЯ | 2014 |
|
RU2574283C1 |
| Тормозной башмак | 1956 |
|
SU111914A1 |

