(54) ЦИФРОВАЯ СЛЕДЯЩАЯ СИСТЕМА
| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровая следящая система | 1981 |
|
SU1841239A2 |
| Устройство для цифроаналогового пре-ОбРАзОВАНия | 1975 |
|
SU847507A1 |
| БЫСТРОДЕЙСТВУЮЩИЙ МНОГОФУНКЦИОНАЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА В КОД ДЛЯ УСТРОЙСТВ ЭЛЕКТРОМЕХАНОТРОНИКИ | 1994 |
|
RU2094945C1 |
| УСТРОЙСТВО РАДИАЛЬНО-КРУГОВОЙ РАЗВЕРТКИ ИНДИКАТОРОВ КРУГОВОГО ОБЗОРА СУДОВЫХ РАДИОЛОКАЦИОННЫХ СТАНЦИЙ | 1980 |
|
SU1840930A1 |
| СЛЕДЯЩИЙ СИНУСНО-КОСИНУСНЫЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА В КОД СО ВСТРОЕННОЙ ЦИФРОВОЙ КОРРЕКЦИЕЙ ОШИБКИ ПРЕОБРАЗОВАНИЯ | 2020 |
|
RU2741075C1 |
| Преобразователь угла поворота вала в код | 1985 |
|
SU1280698A1 |
| Устройство для управления шаговым электродвигателем с дроблением шага | 1987 |
|
SU1417162A1 |
| Следящий преобразователь угла поворота вала в код | 1983 |
|
SU1116446A1 |
| Многоканальный преобразователь перемещения в код | 1985 |
|
SU1275751A1 |
| Устройство для преобразования перемещения в код | 1981 |
|
SU978174A1 |
Предлагаемая цифровая следящая система предназначена для использования в системах связи с электронными цифровыми машинами и в системах преобразования информации из цифровой в аналоговую форму. Известны, цифровые следящие системы, содержащие устройства формирования команд управления, формирования сигнала рассогласования, отработки кода угла, анализатора знака налряжения 1. Из известных цифровых следящих систем наиболее близкой по технической сущности является система, содержащая устройство управления, первое устройство сравнения и формирования сигнала рассогласования, формирователи сигнала управления, формирователями переменного напряжения, коммутатор и анализатор 2. Недостатком известной системы является ограниченное быстродействие, определяемое временем работы построителя кода по двум направлениям, поэтрму область применения известного устройства ограничивается системами, где задается угол в виде его кода. Цель изобретения - повыщение быстродействия в системах, где возможно задание угла в виде кодов его синуса и косинуса. Это достигаетя тем, что в цифровую следящую систему введены второе устройство сравнения и формирования сигнала рассогласования и два преобразователя «код - напряжение, выходы которых соединены с первыми входами устройства сравнения и формирования сигнала рассогласования, выходы устройства управления соединены с вторыми входами устройств сравнения и формирования сигнала рассоглЕСования, выходы которых связаны соответственно с первыми входами фopмиpoвateлeй сигнала управления, входы коммутатора соединены с входами преобразователей «код - напряжения, а выходы его с вторыми входами формирователей сигнала управления, выходы формирователей переменного напряжения связаны с третьими входами устройств сравнения и формирования сигнала рассогласования. Кроме того, с целью повыщения точности работы, системы в ней выходы преобразователей «код - напряжение соединены с третьими входами формирователей сигнала управления.
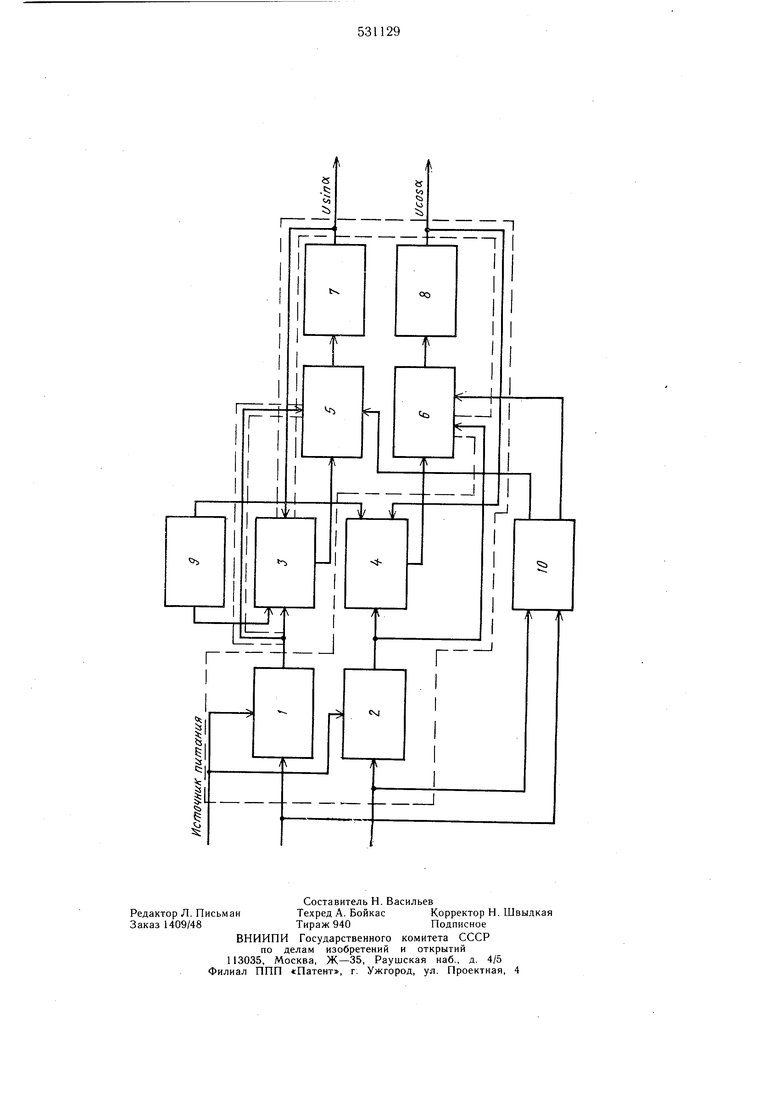
На чертеже нредставлена блок-схема цифровой следяпдей системы.
Система содержит преобразователи 1и 2 «код - напряжение, устройства 3 и 4 сравнения и формирования сигнала рассогласования, формирователи 5 и 6 сигнала управления, формирователи 7 и 8 переменного напряжения устройство 9 управления и коммутатор 10.
Предлагаемая система работает следующим образом.
От заданного устройства код синуса угла подается на преобразователь I «код - напряжение, а код косинуса подается на преобразователь 2.
Формирование напряжений, пропорциональных синусу и косинусу угла производится по двум аналогичным каналам, в которых для повышения точности преобразователи «код - напряжение запитаны от общего источника питания.
Учитывая аналогичную работу каждого канала, рассмотрим детально работу одного из них, например формирование напряжения, пропорционального синусу угла. С выхода преобразователя 1 «код - напряжение напряжение подается на вход устройства 3 сравнения и формирования сигнала рассогласования, а на второй вход устройства 3 сравнения поступает напряжение с выхода формирователя 7 переменного напряжения. Если это напряжение не соответствует величине задаваемого напряжения с преобразователя 1 «код - напряжение, то в устройстве сравнения появляется сигнал равности, который после формирования в сигнал рассогласования подается на формирователь 5 сигнала управления, который управляет величиной и фазой выходного напряжения формирователя 7 таким образом, чтобы выходное напряжение соответствовало заданному коду синуса угла. При этом сигнал на выходе устройства 3 становится равным нулю. Аналогично работает второй канал отработки кода косинуса угла -И на выходе формирователя 8 переменного напряжения обеспечивается напряжение, соответствующее коду косинуса угла. В зависимости от знака кода задаваемого синуса и косинуса угла коммутатор 10 переключает формирователи 5 и 6 так, что устанавливается соответствующая фаза переменного напряжения на выходе формирователей 7 и 8 переменного напряжения.
Сигналы в устройствах 3 и 4 синхронизируются устройством 9 управления, при этом устра-няются относительные изменения выходных напряжений формирователей 7 и 8. Эти изменения будут пропорциональны, в результате чего точность построения угла в других устройствах, принимающих данны,е и sin oi. и Ucos а, не будет ухудщаться.
С целью повышения точности введены связи выходов преобразователей 1м 2 с соответствующими входами формирователей 5 и 6.
Формула изобретения
5 выходы формирователей переменного напряжения связаны с третьими входами устройств сравнения и формирования сигнала рассогласования;
Источники информации, принятые во внимание при экспертизе
1 Авторское свидетельство СССР № 339905, кл. G 05 В 15/02, 1971.
