Изобретение относится к автоматическим системам связи цифровых вычислительных машин (ЦВМ) с силовыми приводами управления.
Известны способ и устройство, его реализующее, осуществляющие формирование напряжений, пропорциональных синусу и косинусу угла и скорости его изменения, в котором повышение точности выдачи напряжений, пропорциональных синусу и косинусу угла, осуществляется дополнительными интеграторами, входы которых соединены с входами формирователей сигналов управления, а выходы подсоединены ко вторым входам интеграторов этих формирователей.
При работе в замкнутой следящей системе на выходах дополнительных интеграторов формируют напряжения, пропорциональные скорости изменения соответственно синуса и косинуса угла.
Интегрирование этих величин в интервалах между сравнениями, определяемых узлом управления (синхронизации), обеспечивает соответствующее изменение напряжений и уменьшает ошибки в интервалах между моментами сравнения.
Недостатком такого способа и устройства являются ошибки в переходных режимах и установление величин напряжений на выходах дополнительных интеграторов после 3-4 интервалов сравнения заданной и отработанной величин (см. Я.З. Цыпкин. Теория импульсных систем. М., Физматгиз, 1958 г., стр. 465-480).
Известен способ и устройство, его реализующее, на основе изобретения по авт. свид. СССР №531129, примененные в изд. "Орех" (см. Техническое описание "Орех-ЦВК 101", часть 2, ГК1.700.018 Т01, 1975 г.), в котором частично устранен этот недостаток.
В этом способе интегрируют напряжение, пропорциональное скорости изменения угла, задаваемого в интервалах между моментами сравнения, одним из интеграторов (интегратором формирователя сигнала управления, обеспечивающего выработку напряжения, пропорционального синусу или интегратором формирователя сигнала управления, обеспечивающего выработку напряжения, пропорционального косинусу) в зависимости от того, какая тригонометрическая функция имеет большую скорость изменения в октанте, которому принадлежит задаваемый угол.
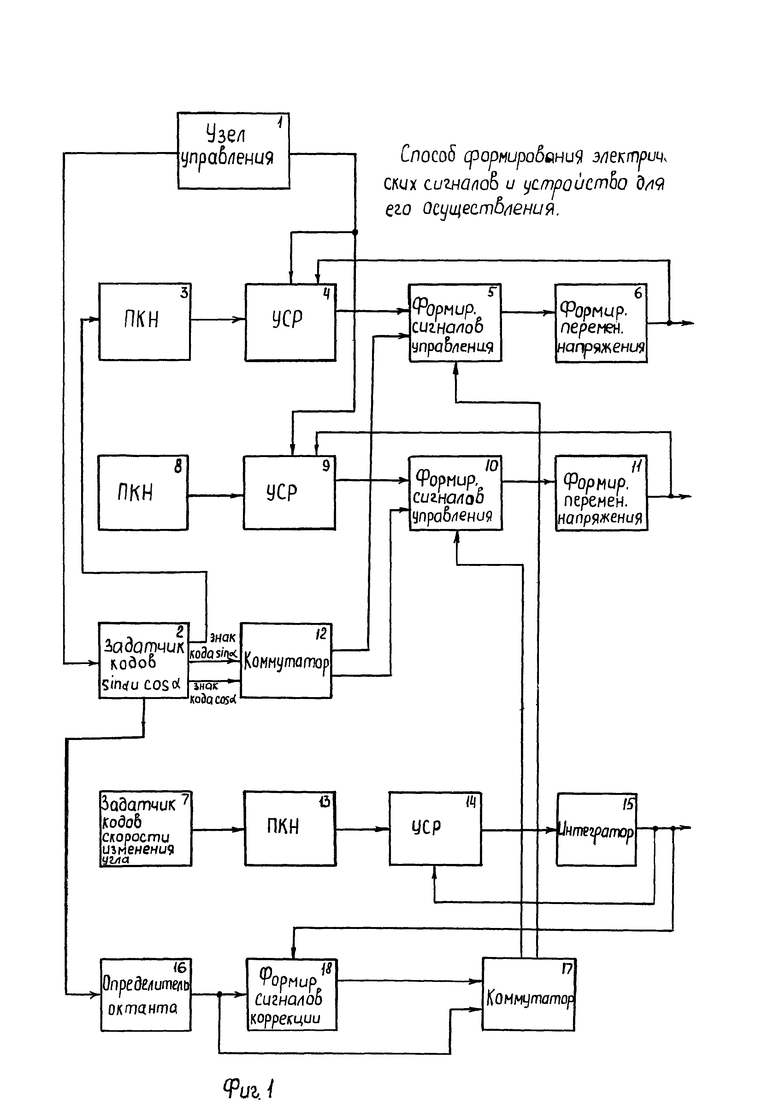
Устройство, реализующее способ (Фиг. 1), содержит: узел управления 1, задатчик кодов синуса и косинуса угла 2, преобразователь "код-напряжение" 3, узел сравнения и формирования сигнала рассогласования 4, формирователь сигнала управления 5, формирователь напряжения переменного тока 6, задатчик кодов скорости изменения угла 7, преобразователь "код-напряжение" 8, второй узел сравнения и формирования сигналов рассогласования 9, второй формирователь сигналов управления 10, второй формирователь переменного напряжения 11, коммутатор 12, ПКН - 13, третий узел сравнения и формирования сигналов рассогласования 14, интегратор 15, определитель октантов 16, второй коммутатор 17, формирователь сигнала коррекции 18.
При подаче на вход одного из интеграторов напряжений, пропорциональных скорости изменения угла в интервалах между сравнениями заданного и отработанного напряжения на выходе интегратора формирователя сигнала управления 5 или 10 будет изменяться напряжение, в результате чего уменьшается погрешность формирования напряжений, пропорциональных синусу или косинусу угла.
Этот способ и устройство, как наиболее близкое по технической сущности и достигаемым результатам, приняты в качестве прототипа.
Однако такому способу присущи методические ошибки, обусловленные, во-первых, тем, что скорость изменения синуса и косинуса угла не равна скорости изменения угла и, во-вторых, тем, что экстраполируется интегрированием только одно из напряжений: либо пропорциональное синусу угла, либо пропорциональное косинусу угла.
Наличие этих методических ошибок ограничивает возможности повышения точности формирования выходных переменных напряжений и соответственно точности отрабатываемого в приемном устройстве угла по этим напряжениям.
Для достижения задаваемых точностей увеличивают частоту сравнений заданного и отработанного напряжений. Это требует повышения частоты вычислений задаваемых тригонометрических функций угла в цифровых вычислительных машинах и соответствующих дополнительных затрат машинного времени.
Целью изобретения является устранение этих недостатков, а именно: повышение точности и сокращение времени ЦВМ, затрачиваемого на формирование кодов синуса и косинуса угла за счет устранения методических ошибок и обеспечения возможности снижения частоты выдачи сигналов из ЦВМ.
Указанная цель достигается техническим решением, представляющим новый способ формирования сигналов управления, осуществление которого обуславливается применением предложенного устройства.
В способ, основанный на формировании непрерывных напряжений по дискретно вырабатываемым электрическим сигналам в виде кодов синуса и косинуса угла путем преобразования этих кодов в дискретные напряжения и формировании сигналов рассогласования между ними и формируемыми соответствующими непрерывными напряжениями, интегрировании сигналов рассогласования в интервалы времени их формирования до тех пор, пока величина каждого из двух непрерывных напряжений станет равной, соответствующей задаваемому коду, а также основанный на формировании электрических сигналов, пропорциональных скорости изменения угла, вводят операции инвертирования электрических сигналов, пропорциональных синусу угла, а затем умножение на сигналы, пропорциональные скорости изменения угла и умножение электрических сигналов, пропорциональных косинусу угла и скорости изменения угла; выработанные электрические сигналы первого произведения интегрируют при формировании непрерывного напряжения, пропорционального косинусу угла, а выработанные электрические сигналы второго произведения интегрируют при формировании непрерывных напряжений, пропорциональных синусу угла.
Такой способ может быть осуществлен новым устройством, содержащим задатчики кодов синуса, косинуса угла и скорости его изменения, два преобразователя код-напряжение, два узла сравнения и формирования сигнала рассогласования, два формирователя сигналов управления на основе интеграторов, два формирователя переменного напряжения.
Отличие устройства, позволяющее осуществить новый способ, состоит в том, что оно снабжено инвертором и двумя умножителями электрических сигналов, у каждого из которых первые входы подсоединены к задатчику кодов скорости изменения угла, второй вход первого умножителя подсоединен через инвертор к выходу первого формирователя сигнала управления, а выход этого умножителя подсоединен к входу интегратора второго формирователя сигнала управления, а второй вход второго умножителя подсоединен к выходу второго формирователя сигнала управления, выход второго умножителя подсоединен к входу интегратора первого формирователя сигнала управления.
Умножители электрических сигналов могут быть выполнены в виде преобразователей "код-напряжение". Сущность изобретения заключается в том, что безынерционно формируют два электрических сигнала в виде напряжений постоянного тока, величины которых пропорциональны скоростям изменения синуса и косинуса угла и непрерывно их интегрируют в каналах отработки непрерывных напряжений, пропорциональных соответственно синусу и косинусу угла; сигналы, пропорциональные скорости изменения синуса и косинуса угла, формируют умножением сигналов скорости изменения угла и соответственно сигналов пропорциональных косинусу и синусу угла.
Приложенные чертежи изображают:
фиг. 1 - устройство, реализующее способ-прототип;
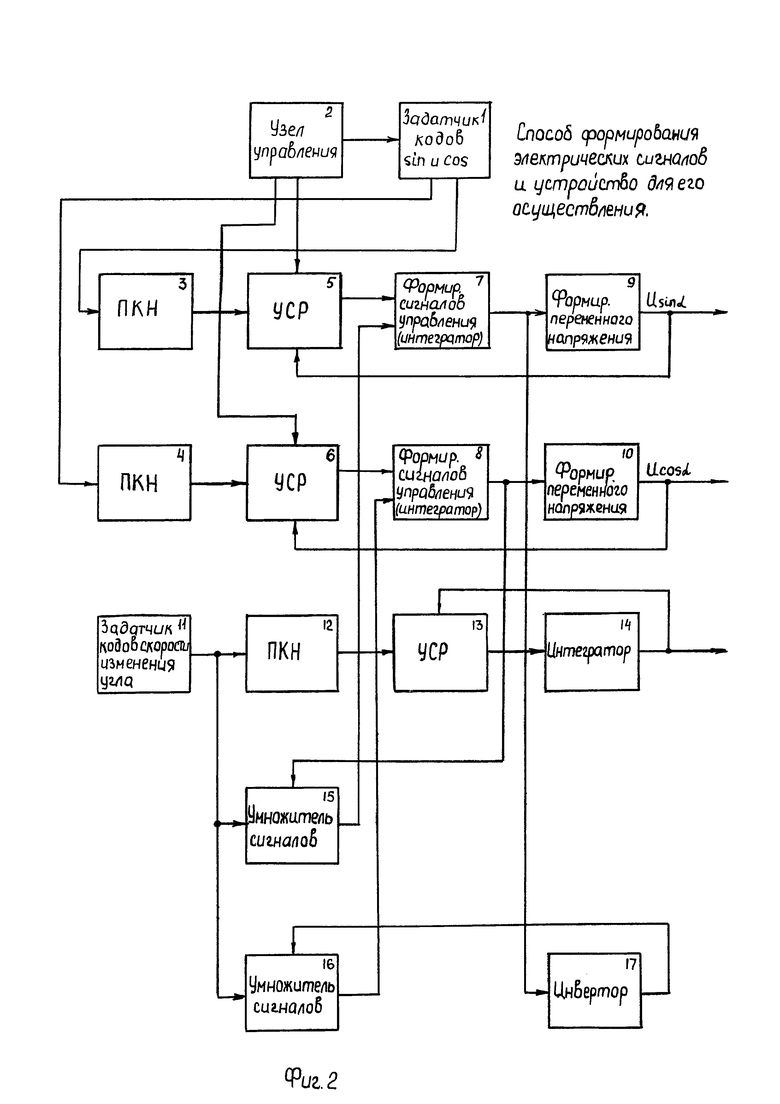
фиг. 2 - устройство для осуществления предлагаемого способа;
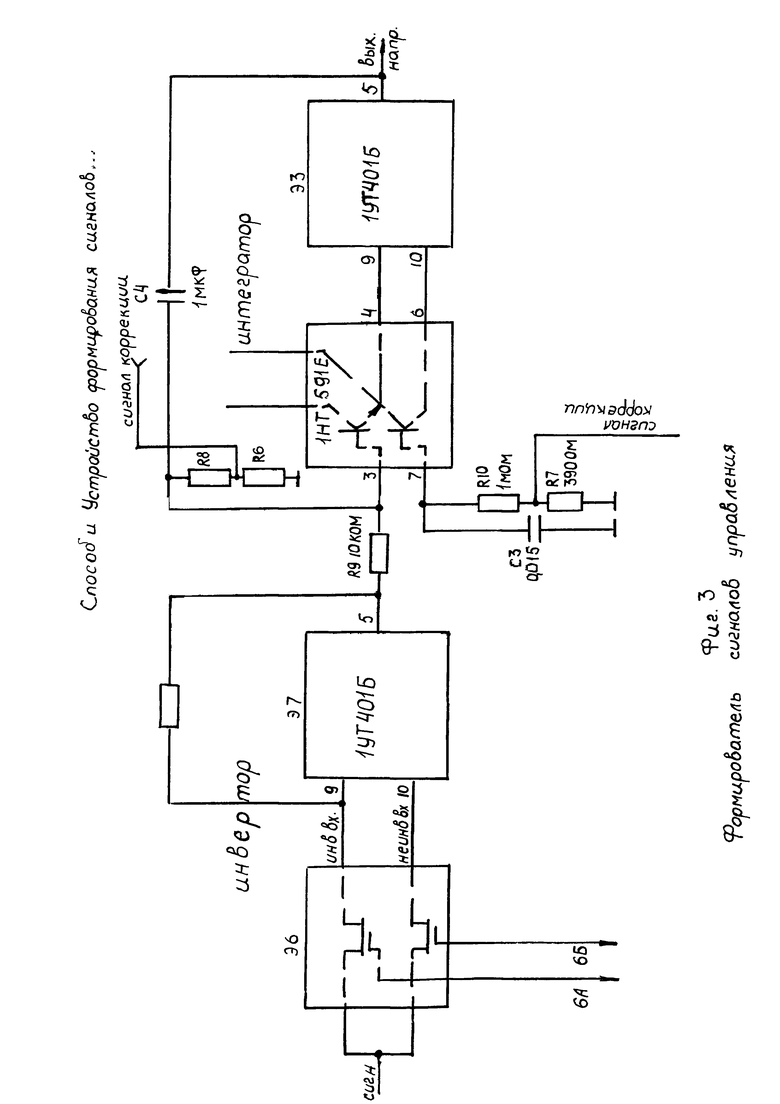
фиг. 3 - формирователь сигнала управления.
Устройство формирования сигналов управления приводами радиолокационных систем и систем управления оружием содержит задатчик 1 кодов синуса и косинуса угла, узел управления 2, преобразователи 3 и 4 "код-напряжение", узлы сравнения и формирования сигналов рассогласования 5 и 6, формирователи сигналов управления 7 и 8 на основе интеграторов, формирователи переменных напряжений 9 и 10, задатчик кода скорости изменения угла 11, преобразователь "код-напряжение" 12, узел сравнения 13, интегратор 14, умножители сигналов 15 и 16, инвертор 17.
В качестве задатчика кодов синуса и косинуса и скорости изменения угла может быть ЦВМ или другое устройство, вычисляющее код тригонометрической функции угла и формирующее по коду одной тригонометрической функции, например, коду косинуса угла код второй функции код синуса угла, узел управления 2 представляет собой командно-синхронизирующее устройство, вырабатывающее команды управления одновременной выдачи кодов синуса и косинуса на входы двух преобразователей "код-напряжение" 3, 4. Напряжения с выходов этих преобразователей подаются на входы двух узлов сравнения 5 и 6.
На вторые входы узлов сравнения подаются выработанные напряжения переменного тока с выходов формирователей 9 и 10 в те же моменты времени, определяемые узлом управления, что и задаются коды.
Узел сравнения может быть выполнен по схеме сравнения дискретного напряжения по величине пропорционального заданному коду синуса и косинуса с выходным переменным напряжением, как обычно в следящих системах - прямоугольной формы.
Время сравнения определяется узлом управления 2, обеспечивающим синхронное сравнение в двух узлах сравнения в моменты подачи кодов на входы двух преобразователей "код-напряжение".
Сравнение задаваемого напряжения с выхода ПКН с отрабатываемым напряжением переменного тока по технической сущности является процессом измерения, т.к. должно быть измерено отклонение величины одного напряжения (выходного) относительно другого (заданного) с выхода ПКН.
При измерении переменных напряжений обычно требуется интегрирование последнего в течение времени большего полупериода (см. Волгин П.И. Измерительные преобразователи переменного напряжения в постоянное. Москва. "Сов. радио", 1977, стр. 172-173).
Синхронизация моментов сравнения в двух узлах сравнения исключает необходимость интегрирования переменного напряжения перед сравнением с напряжением преобразователя "код-напряжение".
Сигналы рассогласования с выходов узлов сравнения 5 и 6 подаются на входы формирователей сигналов управления, например. Эти формирователи состоят из усилителей, инвертора и интегрирующего усилителя с высокоомным входом, схема которого приведена на фиг. 3.
Этот формирователь обеспечивает следящую отработку дискретно появляющегося напряжения с выхода ПКН постоянно существующим напряжением постоянного тока.
Знаки постоянных напряжений на выходах формирователей сигналов управления устанавливают соответственно знаку кода синуса угла, отрабатываемого в виде напряжения одним формирователем, и знаку кода косинуса, отрабатываемого другим преобразователем.
Формирователи переменного напряжения выполняются по любой из известных схем формирования переменного напряжения прямоугольной формы (см., например, "Вычислительная техника", Справочник, т. 1, Аналоговые вычислительные устройства, под ред. Г.Д. Хаски и Г.А. Корна, Энергия, Москва, 1964, рис. 3.118, стр. 149).
Фаза переменного напряжения (0° или 180°) определяется знаком выходного напряжения формирователя сигнала управления и при изменении знака выходного постоянного напряжения формирователя сигнала управления фаза переменного напряжения изменяется на 180°.
Напряжения сигналов рассогласования в формирователях сигналов управления 7 и 8 интегрируют до тех пор, пока напряжения на выходах соответствующих формирователей сигналов управления изменятся до такой величины, при которой величины напряжений переменного тока на выходах формирователей переменного напряжения станут равными заданным напряжениям с выходов ПКН.
Однако при изменении задаваемых сигналов - кодов синуса и косинуса в интервалах времени между моментами сравнения заданного (с выхода ПКН) и отработанного с выхода формирователя 10 возникает ошибка в воспроизведении заданной величины.
Уменьшение таких ошибок повышением порядка астатизма, например введением интеграторов приводит к уменьшению быстродействия (переходный процесс длится несколько интервалов поступления информации).
Предлагаемым способом и устройством, его реализующим, предлагается вводить в системы, вырабатываемые корректирующие сигналы, пропорциональные скоростям изменения сигналов, пропорциональных синусу и косинусу угла.
Для этой цели в узле 15 умножают сигналы, пропорциональные скорости изменения угла и косинусу угла, а в узле 16 умножают сигналы, пропорциональные скорости изменения угла и синусу угла.
Выработанные первые сигналы интегрируют интегратором формирователя 7, а вторые сигналы интегрируют интегратором 8. В результате такой коррекции существенно повышается точность, обеспечивается возможность снижения частоты выдачи информации о сопровождаемых целях в 3 раза.
Экономическая эффективность внедрения предложенного способа определяется экономией машинного времени ЦВМ, затрачиваемого на экстраполяцию данных.
Так, например, в изделии "Орех" на экстраполяцию данных затрачивается n=24 такта с частотой f=78 Гц для каждого канала.
При числе каналов в одном комплекте изделия m, равном 20, общее время (при длительности такта, равной τ=6,6 мкс), затрачиваемое на экстраполяцию
Tэкстр=n·f·τ·m=24·78,0·6,6·20=249 мс
Сокращение затрат времени в 3 раза дает экономию 166 мс машинного времени в с, т.е. 14% машинного времени. При стоимости комплекта цифровой вычислительной машины и обслуживающих устройств связи 300000 руб. (в ценах 1981 г.) экономический эффект при внедрении предлагаемого способа на одном комплекте изделия составил бы 42000 руб.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО РАДИАЛЬНО-КРУГОВОЙ РАЗВЕРТКИ ИНДИКАТОРОВ КРУГОВОГО ОБЗОРА СУДОВЫХ РАДИОЛОКАЦИОННЫХ СТАНЦИЙ | 1980 |
|
SU1840930A1 |
| БЫСТРОДЕЙСТВУЮЩИЙ МНОГОФУНКЦИОНАЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА В КОД ДЛЯ УСТРОЙСТВ ЭЛЕКТРОМЕХАНОТРОНИКИ | 1994 |
|
RU2094945C1 |
| Преобразователь кода в угол поворота вала | 1989 |
|
SU1711330A1 |
| Генератор развертки | 1975 |
|
SU585461A1 |
| Устройство для управления асинхронным электродвигателем | 1989 |
|
SU1663734A1 |
| Способ преобразования угла поворота вала в код и устройство для его осуществления | 1989 |
|
SU1713103A1 |
| Электропривод переменного тока и его варианты | 1981 |
|
SU1054863A1 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 1993 |
|
RU2085019C1 |
| Цифровая следящая система | 1973 |
|
SU531129A1 |
| Преобразователь угловых перемещений в код | 1985 |
|
SU1311024A1 |
Изобретение относится к автоматическим системам связи цифровых вычислительных машин с силовыми приводами управления. Технический результат - повышение точности системы. Устройство содержит задатчик синуса и косинуса угла, узел управления, преобразователи 3, 4 код-напряжение, узлы сравнения и формирования сигналов рассогласования 5, 6, формирователи сигналов управления 7, 8 на основе интеграторов, формирователи переменных напряжений 9, 10, задатчик кода скорости изменения угла 11, преобразователь код-напряжение 12, узел сравнения 13, интегратор, 14, умножители сигналов 15, 16, инвертор 17, соединенные соответствующим образом. 3 ил.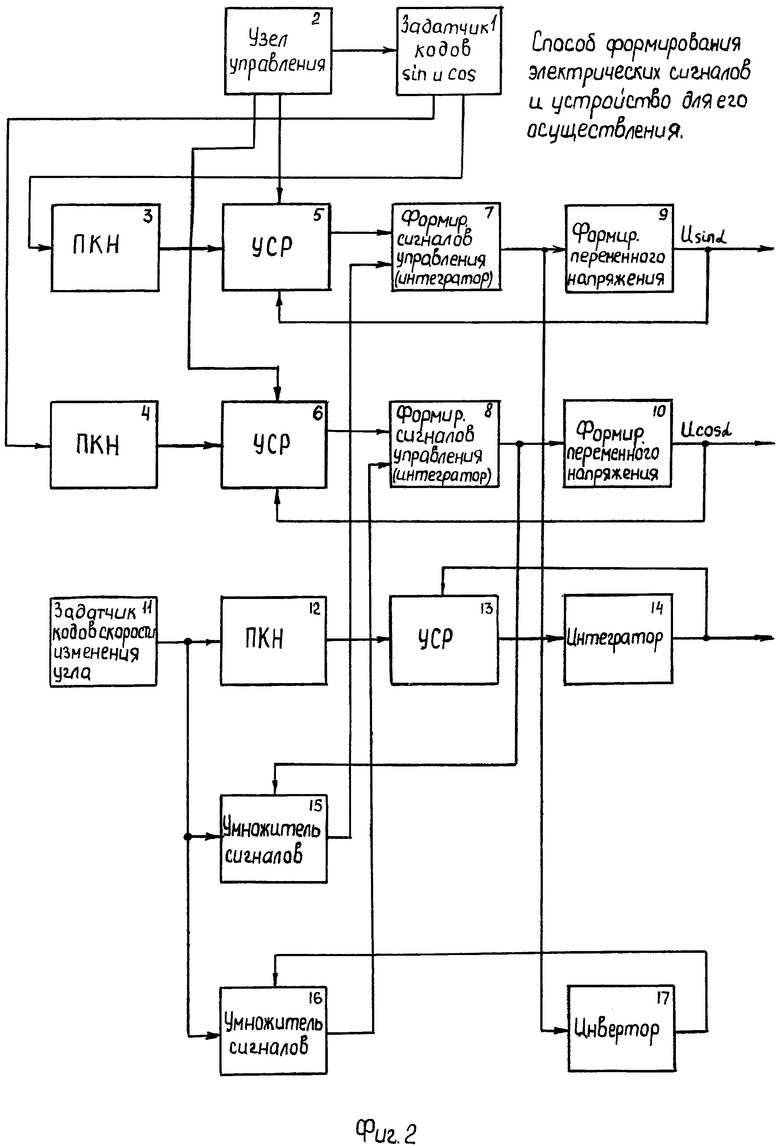
Цифровая следящая система по авт. свид. №531129, отличающаяся тем, что, с целью повышения точности системы, в нее введены последовательно соединенные задатчик кодов скорости изменения угла, третий преобразователь код-напряжение, блок сравнения, интегратор, а также инвертор и умножители, первые входы которых соединены с выходом интегратора, выходы первого и второго умножителей подключены ко вторым входам соответственно формирователя сигналов управления каналов формирования напряжения, пропорционального синусу и косинусу угла, а вторые входы первого и второго умножителей соединены соответственно с выходами формирователя сигналов управления каналов формирования напряжения, пропорционального косинусу угла и инвертора, вход которого соединен с выходом формирователя сигналов управления канала формирования напряжения, пропорционального синусу угла.
| Цифровая следящая система | 1973 |
|
SU531129A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |

