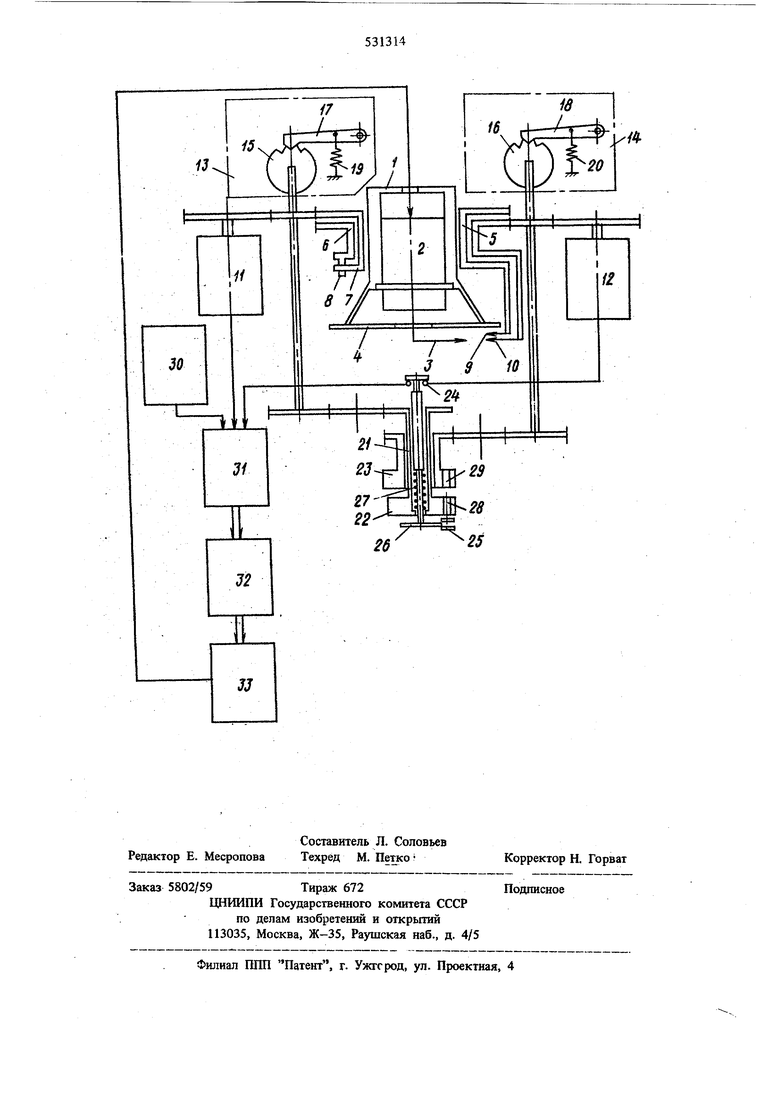
задании и воспроизведении программы облучения. Достигается это тем, что предлагаемое устрой ство для. дистанционного управления и контроля движения излучающей головки аппаратов луч вой терапии снабжено двумя концентрично установленными одно в другом кольцами, двумя индексами задания пределов движения головки, Ьлумя рукоятками установления пределов движения головки, даумя фиксирующими механизмами, каждый из которых кинематически связан с рукояткой и выполнен в виде качающегося подпружиненного рычажного упора и подвижной звёздочки, выполненной с впадинами в количестве, кратном числу задаваемых отсчетнь1Х угловых положений головки, и двумя датчиками пределов движения головки, причем кольца подвижно насажены на стакан, как на ось, и выполнены с упорами, расположенными соответственно в торцовой части одного из них и на образующей другого. Индексы одними кон цами жестко закреплены на поверхности соответствующего кольца, а другими выходят на образующую поверхность щкалы. Рукоятки снабжены механическим фиксатором, скрепляющим их между собой, и электрическим переключателем в их полой оси. Один датчик пределов движения головки злектрически непосредственно связан с приводом,, другой - через размыкающий контакт переключателя, а каждьш из них кинематически связан с соответствующей рукояткой и фиксирующим механизмом, при этом рукоятки, фиксирующие механизмы и датчики кинематически связаны с со ответствующим им индексом задания предела движения головки посредством соответствующе го кольца. На чертеже изображена функциональная схема устройства для дистанционного управления и контроля движения излучающей головки аппаратов лучевой терапии. Устройство состоит из размещенного в неподвижном стакане 1 прижимающего элемента 2 с индексом 3 положения головки, жестко закрепленном на вращающейся оси элемента 2, и шкалой 4, жестко закрепленной на торцовой части стакана 1; двух подвижных концентричес ких колец 5 и 6, смонтированных на поверхности стакана 1, как на оси, с упорами 7 и 8 и индексами 9 и 10 задания пределов движения головки; двух датчиков 11 и 12 пределов движения головки, каждьш из которых кинема тически связан со своим кольцом и индексом; двух фиксирующих положение головки механизмов 13 и 14, состоящих из подвижных зве дочек 15 и 16, качающихся рычажных упоров 17 и 18 и пружин 19 к 20; двух концентрично расположенных на общей полой оси 21 руояток 22 и 23 установления пределов движеия головки, введенных в кинематическую цепь аждого датчика (11 и 12), электрического пееключателя 24 режимов облучения и механичесого фиксатора 25, смонтированного на рукоятке 22 и состоящего из размещенного в полой оси 21 щтока 26, который в рабочем положении под действием пружины 27 механически воздействует на переключатель 24 режимов облучения и одновременно перемещает палец 28, который входит в цилиндрический паз 29 рукоятки 23 и скрепляет рукоятки 22 и 23 между собой. Кроме того, в устройстве имеется датчик 30 скорости движения головки, соединенный злектрически с приводом 31 перемещения излучающей головки 32, с которой кинематически связан задающий злемент 33 ее положения. Для проведения маятникового секторного режима облучения гамма-терапевтическим аппаратом по осям ротации и конвергенции каждая дистанционно управляемая ось должна иметь свое отдельное устройство для дистанционного управления и контроля движения излучающей головки. Устройство работает следующим образом. В режиме маятйикового секторного облучения раздельно с номощыр рукояток 22 и 23 оператор по щкале 4 устанавливает индексы 9 и 10 на заданные угловые величины пределов качания головки и тем самым одновременно разворачивает роторы датчиков И и 12 на углы, соответственно пропорциональные зтим величинам. Затем датчиком 30 устаяайливается величина скорости качания излучающей головки. Движение головки 32 в заданных пределах кача1шя контролируется по показаниям индекса 3 положения головки по той же щкале 4, где устанавливались заданные величины пределов ее качания. В режиме статического облучения для дистанцио1шой установки при установлении операторской излучающей головки 32 в требуемое угловое положение индексы 9 и 10 совмещаются и образуют единый индекс, рукоятки 22 и 23 при этом механическим фиксатором 25 скрепляются между собой и образуют единую рукоятку, а переключатель 24 режимов облучения отключает один из датчиков (12) пределов движения головки, в то время как другой (11) при развороте его ротора иа некоторый угол, соответствующий требуемому углу поворота излучающей головки 32, выдает сигнал, аропорциональный зтому углу, в привод 31 перемещеиия головки. Поворот излучающей головки 32 на тр уемый угол контролируется по показаниям индекса 3 положения голсшки шо шкале 4, по которой единым индексом за|дания пределов движения головки устанавлива55ется величина требуемого угла поворота излу 1ающей головки 32. Формула изобретения 1. Устройство для дистанцнрнного управления и контроля движения излучающей головки аппаратов лучевой терапии, содержащее привод перемещения гоповки с датчиком скорости и задающим элементом положения головки, прижимающий элемент положения головки, жестко закрепленный внутри неподвижного стакана, электрически связанный с задающим элементом положения и снабженный подвижным индексом положения головки, жестко закрепленным на его вращающейся оси, и неродаижной щкалой, жестко закрепленной на торцовой части стака-на, отличающееся тем, что, с целью невключения облучения здоровых тканей вследствие ощибок при задании и воспроизведении программы облучения, оно снабжено двумя кон центрично установленньпли одно в другом кольцами, даумя рукоятками установления пределов движения головки, двумя индексами задания пределов движения головки, двумя фяк{сируюишмн механизмами и двумя датчиками Пределов движения, причем кольца подвижно насажены на стакан, как яа ось, один датчик пределов движения головки непосредственно свя зан с приводом, другой - через размыкающий контакт.переклютателя, а каждый нз них кине4магически связан с соответствующей рукояткой и фиксирующим механизмом, при этом рукоятки, фиксирующие механизмы и датчики кинематически связаны с соответствующим им индексом задания предела движения головки посредством соответствующего кольца. 2. Устройство по п. 1, отличающееся тем, что индексы зада1ШЯ пределов головки концентрично расположены на общей полой оси, одними когащми жестко закреплены на поверхности соответствующего кольца, а другими связаны с образующей поверхностью шкалы. 3. Устройство по п. 1, отличающееся тем, что кольца выполнены с упорами, расположенными соответственно в торцовой части одного из них и на образующей другого. 4.Устройство по п. 1, отличающееся тем, что рукоятки снабжень механическим фиксатором, скрепляющим их собой и электрическим переключателем режимов облучения, установленным в их полой оси. 5.Устройство по п. 1, отличающееся тем, что каждый из фиксирующих механизмов кинематически связан с рукояткой и вьшолнен в виде качающегося подпружиненного рычажного упора и подвижной звездочки. 6. Устройство попп. 1и5, отличающеа с я тем, что подвижные звездочки выполнены с впадинами в количестве, кратном числу задаваемых отсчетных угловых положений головки.


| название | год | авторы | номер документа |
|---|---|---|---|
| Ротационно-конвергентный гамматерапевтический аппарат | 1975 |
|
SU553767A1 |
| Устройство для управления ротационным аппаратом лучевой терапии | 1974 |
|
SU519090A1 |
| Гамма-терапевтический аппарат | 1975 |
|
SU534895A1 |
| Устройство для моделирования суммарных дозных распределений при многопольной лучевой терапии | 1971 |
|
SU441733A1 |
| СТАНОК ПЛОСКОШЛИФОВАЛЬНЫЙ ЭЛЕКТРОМЕХАНИЧЕСКИЙ | 1994 |
|
RU2080237C1 |
| КРАНО-МАНИПУЛЯТОРНАЯ УСТАНОВКА | 2002 |
|
RU2240971C2 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО СНЯТИЯ ПЕРЕДНЕЙ КРЫШКИ С ПУСКОВОЙ ТРУБЫ ПЕРЕНОСНОГО ЗЕНИТНОГО РАКЕТНОГО КОМПЛЕКСА (ПЗРК) | 2006 |
|
RU2308658C1 |
| СТАНОК ДЛЯ ОБРАБОТКИ СФЕРЫ НА ДЕТАЛЯХ ИЗ МЯГКИХ И ВЯЗКИХ МАТЕРИАЛОВ | 1970 |
|
SU272773A1 |
| Контроллер управления железнодорожным транспортом и способ его работы | 2023 |
|
RU2808302C1 |
| Контроллер управления железнодорожным транспортом и способ его работы | 2022 |
|
RU2788226C1 |