«ен с соответст.вующйми входами элемента НЕ-Н и |бло«а запуска, каждый выход пятой группы выходав которого подключен к первому .входу улравляющего регистра одноименного канала, второй вход Которого соедпнеп с соотаетспвующИМ выходом четвертой групл.ы выходов блока sainyoKa, третий вход управляющего peroiCTipa каждого .канала подключен к однои мвняому .выходу дешифратора.
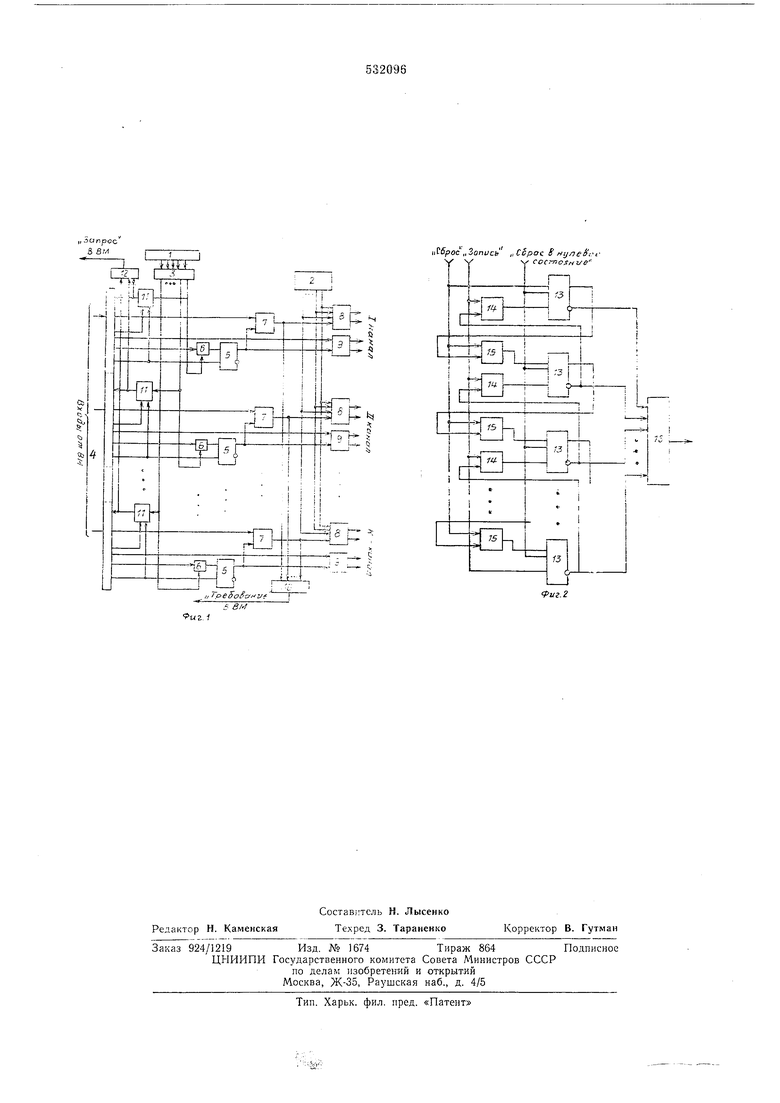
На фиг. I показана блок-схема п/редлагаамого устройства; на фиг. 2 - схе.ма управляющего iperncTpa, где / - регистр номера канала; 2 - ,репистр номера датч.ика, 3- дещиф рато р, 4 - блок запуска, 5 - триггеры, 6,7 - элементы И, 5 - блоки адресных ключей, 9 - ключи управления, 10 - элемент НЛИ, // - ун(ра:вляющие регистры, 12- элемент НЕ-Н, 13 - триггеры, 14, 15 - элементы Н, 16 - элемент ИЛИ.
Устройство фун1кц1юнпрует следуюпи1м образом.
Работа устрой.ства ,нач.инается с поступ;ге1ьия от .вычислительной машины адресов датчи.ков одного канала, следующие друг за другом. Нри это.м, адрес номера «анала постулает в .регистр HOiMepa канала ), дешифрируется и :ПО:ст 1нает на первый вход элемента I-I 6 и вход ушравляющего регистра //. Код номера датчика поступает в регистр номера датчика 2 .Н с его выходов ла.раллельпо поступает на входы блоко.в адресных ключей 8 всех канаЛО.В. Сигналы :па выходах блока запуска п.оявляются .в определенной последовате.тьностл, задаваемой сигнала.м.и, подаваемыми от .вычислительной машины на вход программного управления п сигналом от управляющего .регистра. Сигнал разрешения .работы соответствующего канала подается с блока залуака 4 на второй вход элемента И 6 данного канала носле того, каК ,из1мерения в .дапно.м ка1нале за.кончены. Пр.и со.впадении силпалов на обоих входах элемента И 6 триггер 5 переводится в еднничное состояние. При этом с его едишичного уровня снимается сигнал, который разрешает прохождение сигналов с блока запуска 4 через элемент И 7 и через ключ управления 9. Но окончании этого сигнала .появляются сигналы с выхода первой группы выходов блока защ.иты, число .которых управляется через програм1мный вход от вычислнтельпой ма.щипы в зависимости от числа датчиКО|В этого канала. Например, в ирогра.мме вычислительной мащвны нодряд следует нять датчн1ков первого канала, тогда передается адрес .первого датчика от вычислительной мащины, затем в блоках 1,2,5,6,4 происходит процесс, описанный вы.ше, после этого передается с выхода )Первой группы выходов блока запуска сигнал на элемент И 7 и происходит перенос номера датчика с регистра номера датч.ика 2 блок адресных ключей 8 в а Н1паратуру канала связи и од«овре.мвн«о через элемент ИЛИ 10 на вычислительную мащину подается сигнал «требова.пие, затем
передается от вычислительной 1маш,ины номер следующего второго датчика этого канала в блоки / « 2 .и формируется второй сигнал на выходе первой пруппы выходов блока зашуска 4, .в .кана.т связи передается номер второго датчика и т. д. Число лмнульсов с выхода первой группы выходов блока за.пуска 4 и время их поя1вления уира1вляется через программный вход блока зануска 4 от вычислительной мащнны. От дешифратора в управляющий регистр // :по.даются сигналы, число которых соответствует количеству, следуемых подряд, помер.ов датчиков этого канала, при этсм в триггере 13 последовате.тыю но входу
«зап,ись записываются единицы. Носле того, ка-к следующие .подряд в inporpa.MMe вычислительной мащины номера датчиков (|код) перенисаны в аппа.ратуру данного сигнала, с выхо.да второй групп.ы выходов блока зануска 4 поступают чорез открытый ключ управления 9 в аппаратуру канала необходимые управляющ1ие сигналы, числ.о серий Которых определяется нал.пчием сигнала .на выхо.де управляющего регистра 11, снимаемого с выхода элемента ИЛР1 16. Сигнал аа выходе элемента НЛИ 16 будет до тех тор, пока хотя бы в одно.м триггере 13 будет записа:на е.диница. Но оконча.на-Ы (каж.дой импульсной серии управляющих сигналов на вход «сброс
управляющего регистра // (.пятая группа выходов блока зануска) поступает сигнал, списывающий одну единицу в тр1иггорах 13. В ун ра1вляющем регистре /./ э.чементы Н 4 обеснечнвают последовате.чьную запись единиц в триггеры 13, элементы И 15 обеспечивают последовательное сиисываап-ге единип в триггерах 13. Но 1полному окончанию опроса датчлгков телеизмерения, па .выходе элемента ИЛИ 16 управляющего регистра // исчезает
сигнал, тогда с выхода четвертой группы выходов блока запуска 4 .поступает сигнал, кото.рый сбрасывает триггер в нулевое иоложе.ние и контролирует пу.чеБОе со.стоя;пие триггероз 13 управляющего регистра //. Таким
же образо.м, каК это оиисано выще, от вычислительной мащипы передаются остальные номера датчи.ков, .причем, если несколько датчиков .подряд принадлежат одному каналу, то все их номера переписываются .подряд в аппаратуру канала связ.и. Носле того как вычислительная мащина задаст программу работы устрой.стзу уп.ра.вления при помощи .введен.ных управляющих регистров, она освобождается для реще.ния других задач. После того, как хотя бы в одном канале закончится отьрос, в вычислительную мащину от элемента НЕ-И поступает сигнал «за П|рос и вычислительная ма.щ.ина переключается на .последующий нроцесс задания программы работы
устройства для управления телеизмерительной системой.
Анализируя операции, выполняемые в известных устройствах, можно установить следующее. Со временем /i происхо..дит занись в
регистры 1 Н 2 кода .ьомера датчика, со времетем /2 Происходит формирование сигнала на выходе третьей группы выходов блока запуска, со BpetMe.HeM /3 - на выходе четвертой груюлы .выходов, /4 - на выходе первой группы выходов, 3 - На выходе второй грулпы выходов блока запуока. Если имеется Л каеалов со средним числом п датчиков в «аждОМ Кама.ле, то время цикла равно Т,, i Проанализируем операции, выполняемые предлагасмым устройством. Здесь сохранились виды олерацйи прототипа с изменением последовательности и добавилась операция сброса уиравляющего регистра со временем /6. Тогда, если среднее число следующих подряд датчиков равно т, гаремя цикла определитсяТ, m(t, + t, + t + t,)+t + t. ОЧезидно, что в зависимости от т П, Т,, Чем бо;1ьше т - среднее число номеров датчиков одного канала, следующих друг за другом, тем большее время остается вычислнтельиой машиие для рещения других задач. Наибольщая эффективность ее исиользовация будет достигнута в случае, когда номера датчиков и каналов следуют в порядковой последовательности. Выигрыш времени для вычислительной машины определится формулой Г ,- ГУ, + N-m-L Формула изобретения Устройство для управления телеизмерительной системой, содержащее в каждом канале первый элемент II, вы.ход которого соедияеи с первым входом триггера, выход триггера подключен к первым входам второго элемента li и ключа управления, выход второго элемеита И соединен с лервы.м входом блока адресных ключей; выходы регистра номера датчиков подключены к соответствующим входам блоков адресных ключей каждого кана.па, выходы регистра Номера ка-нала через дешифратор соединены с первыми входами первых элемемтоп И одпопмеп.лого .канала, каждый выход первой Лруп.пы выходов блока запуска соединен со вторым входом второго элемента И одноимеииого .каиала, каждый выход второй ГруПЛЫ ВЫХОДО;В ЛОДключен к второму входу .ключа управления, каждый выход третьей группы выходов блока запуска соединен со вторым входом первого элемента И однопмеипо1о каиа.па, каждый выход четвертой лрупиы выходов блока запуска подключен ко второму входу триггера одноименного канала, отличающееся тем. что, с целью повышения быстродействия работы устройства, в него введены элемент НЕ-И и в каждый канал управляющий регистр, выход которого соединен с соответствующими входами элемента НЕ-И и блока заиус.ка, каждый выход пятой группы выходов которого подключен :К ие.рвому входу управляющего регистра одноимеиного канала, второй вход которого соединен с соответствующ1им выходом четвертой группы выходов блока залуска, третий вход управляющего регистра каждого .канала подключен к одноименному выходу дешифратора.
I, Загрсс и SM
„Запись ,1 Сорос В Hijnclfr сссто г/е
Риг.2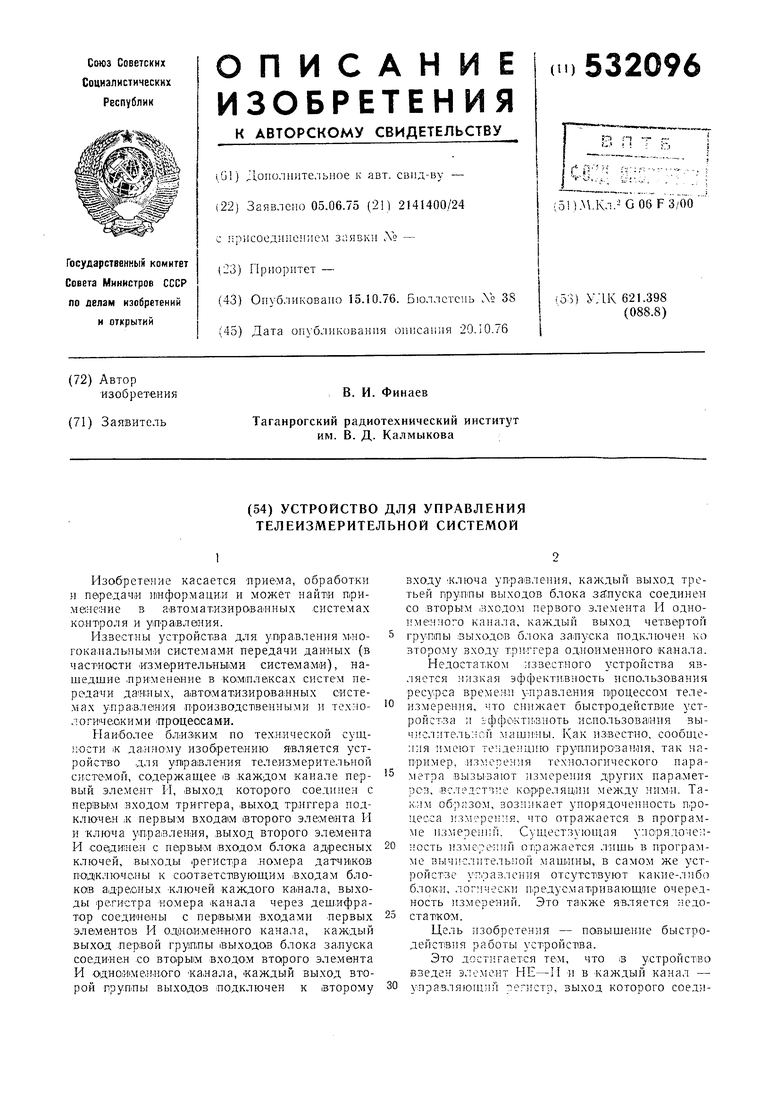
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ МНОГОКАНАЛЬНОЙ ИЗМЕРИТЕЛЬНОЙ СИСТЕМОЙ | 1972 |
|
SU432499A1 |
| Устройство для сопряжения вычислительной машины с датчиками | 1982 |
|
SU1070540A1 |
| Многоканальное устройство для управления телеизмерительной системой | 1975 |
|
SU537341A1 |
| Адаптивная система обработки данных | 1985 |
|
SU1312596A1 |
| Система автоматического контроля параметров электронных схем | 1989 |
|
SU1700538A1 |
| Многоканальное устройство для программного управления | 1988 |
|
SU1585781A2 |
| Многоканальное тензометрическое устройство | 1987 |
|
SU1439387A1 |
| Многоканальное устройство для ввода информации | 1984 |
|
SU1265783A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ АДАПТИВНЫМ МОБИЛЬНЫМ РОБОТОМ | 1998 |
|
RU2143334C1 |
| Способ цикловой синхронизации с динамической адресацией получателя | 2016 |
|
RU2621181C1 |