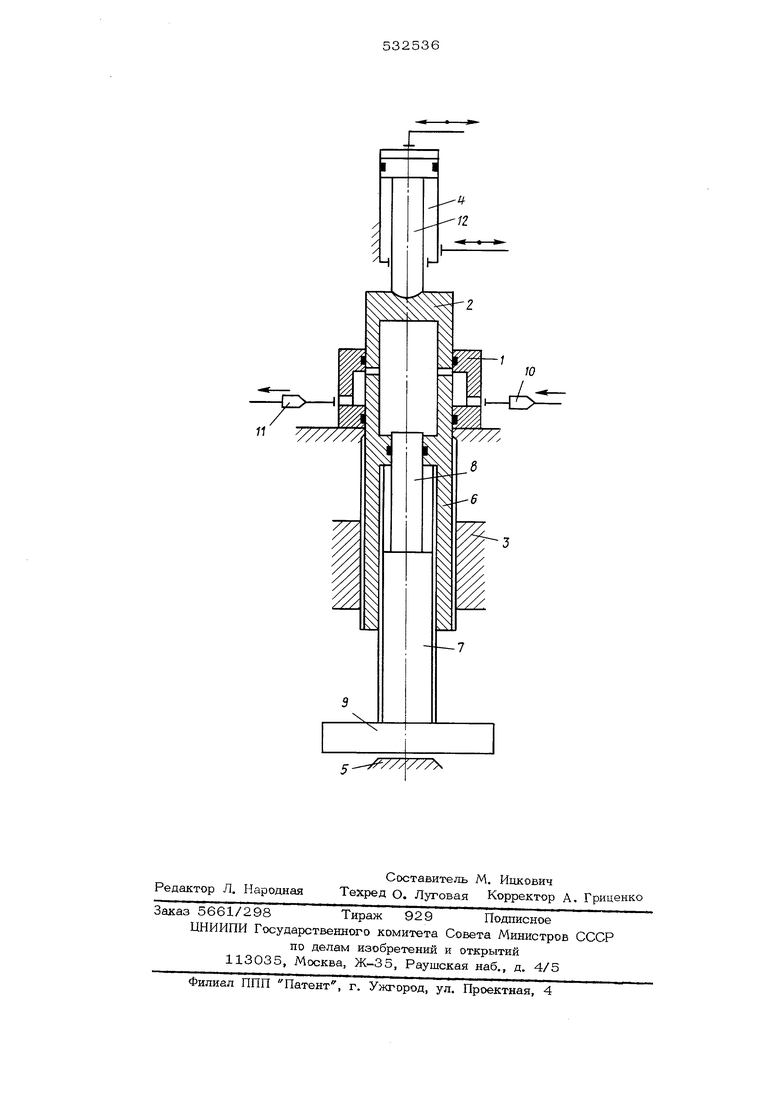
(54) ГИДРАВЛИЧЕСКИЙ МУЛЬТИПЛИКАТОР Осевое перемещение рабочей камеры вы сокого давления 2 сх уществляется штоком 12 с поршнем, находящимся в приводном цилиндре 4. Гидравлический мультипликатор работает следующим образом. В исходном положении подвижные части 12 2-6находятсяв крайнем верхнем положении, а 7-9 -внижнемположении.Вовнутренних полостяхкамер 1 и 2 находится газ (сплошная среда) исходных параметров. По коман де на работу в поршневую полость цилиндра 4 подается жидкость высокого давления, заставл5пощая перемещаться вниз шток 12, который, например, через подпятник перемещает вниз камеру 2 с приводным винтовым плунжером 6. С помощью несамотормозящей резьбы в ходовой гайке 3 винтовой плунжер 6 при ходит в винтовое движение и накапливает на пути своего движения - разгона кинетическую энергию винтового движения. В это время за счет эффекта волчка винтовой плунжер 7 с маховиком 9 и гладким плунжером 8 совершает только вращательное движение на подпятнике 5. Во время этого движения происходит сжатие газа в полости внутри камер 1 и 2, так как гладкий плунжер 8 внедряется (в относительном движении) внутрь корпуса 2. Первоначальное сжатие рабочего тела в камерах 1 и 2 происходит за счет работы цилиндра 4, которая затрачивается также на разгон винтовых плунжерах 6 и 7. В определенный момент усилия цилиндра 4 может не хватить на непосредственное сжа тие рабочего тела в полостях камер 1 и 2 (обратный клапан 10 закрылся). С этого момента начинает переходить в работу ежа тия рабочего тела (сплошной среды - газа кинематическая энергия винтового движения плунжера 6, а затем и плунжера 7 с маховиком 9. Происходит относительное встре ное перемещение винтовых плунжеров 6, 7 и дожатие газа в рабочих полостях камер 2 и 1. При достижении определенного давления открывается обратный клапан 11 и газ поступает в приемный сосуд. С момента начала торможения винтового плунжера 6 системы 7-9 начинают встречное движение, отдавая свою энергию на дожатие газа в полостях камер 1 и 2, Особенностью описываемого гидравлического мультипликатора является возмож- 55пятником, при этом камера высокого давленость бесступенчатого и сколь угодно вы-ния установлена в направляющих корпуса
сокого сжатия рабочего тела в камерах кор-подвижно и жестко соединена с приводным
пусов 1 и 2 за счет расходования на этовинтовым плунжером. кинематической энергии винтового движения винтовых подвижных частей 6-9, которая может быть весьма высокой. За счет регулирования хода и скорости перемещения штока 12, давления в цилиндре 4, маховой массы можно в очень широких пределах менять уровень энергии подвижных частей 6-9, и тем самым получать разное давление рабочего тела, подвергаемого сжатию, в пределах до сверхвысокого, что весьма трудно обеспечить на существующих компрессорах, насосах, мультипликаторах. После совершения цикла сжатия рабочего тела шток 12 поднимается, поднимая камеру 2 с винтовым плунжером 6, который совершает обратное винтовое движение в гайке 3. Со сдвигом по фаз при торможении плунжера 6 в исходное положение возвращаются и массы 7-9. Шкц окончен. Описываемый гидравлический мультипликатор может быть вертикального, горизонтального, наклонного исполнения, а также включать одну, две три, л секций с индивидуальным или групповым приводом. Гидравлический мультипликатор с несколькими камерами сжатия может обеспечить сглаживание пульсаций давления, если работа секций будет происходить со сдвт- ом фаз по времени. Формула изобретения Гидравлический мультипликатор, содержащий установленную в неподвижном корпусе камеру высокого давления с входящим в нее гладким плунжером, а также расположенный в ходовой гайке, закрепленной в корпусе, -фиводной винтовой плунжер, о тличающийся тем, что, с целью повышения энергоемкости, он снабжен закрепленной в цилиндрическом отверстии, предусмотренном на торце приводного винтового плунжера по оси, дополнительной ходовой гайкой и установленным в ней дополнительным винтовым плунжером,жестко соединенным с гладким плунжером, входящим в камеру высокого давления, а также маховиком, закрепленным на дополнительном винтовом плунжере, и неподвижно установленным у торца дополнительного плунжера 

| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРАВЛИЧЕСКИЙ МУЛЬТИПЛИКАТОР | 1972 |
|
SU346151A1 |
| ГИДРОВИНТОВОЙ ПРЕСС-МОЛОТ | 1971 |
|
SU321413A1 |
| Винтовой пресс | 1972 |
|
SU494287A1 |
| ГИДРОВИНТОВОЙ ПРЕСС-МОЛОТ | 1971 |
|
SU302161A1 |
| ИМПУЛЬСНЫЙ ПРЕСС-МОЛОТ | 1973 |
|
SU381451A1 |
| Гидровинтовой пресс-молот | 1978 |
|
SU721338A1 |
| ВИНТОВОЙ ПРЕСС-МОЛОТ | 1973 |
|
SU406761A1 |
| ГИДРОВИНТОВОЙ ПРЕСС-МОЛОТ | 1972 |
|
SU349592A1 |
| Ковочные вальцы | 1972 |
|
SU456670A1 |
| ГИДРОВИНТОВОЙ ПРЕСС-МОЛОТ | 1971 |
|
SU292727A1 |