1
Изобретение относится к зубчатым передачам типа гипоидных со скрещивающимися под прямым углом осями колес и точечным касанием зубьев и предиазначается для использования в машиностроении, например в автомобильной промышленности в главной передаче заднего моста.
Известны зубчатые передачи с параллельными и скрещивающимися осями колес и точечным касанием зубьев, профили которых в сечениях, перпендикулярных к линии зацепления, являются плоскими кривыми, в частности дугами окружностей, а линия зацепления, представляющая собой геометрическое место точек касания зубьев в неподвижно.м пространстве, является прямой 1.
Иедостатком известных передач является наличие радиальных составляющих усилия в зубчатой паре, что приводит, в особенности при консольном расположении колес, к значительному изгибу валов и снижению к. п. д. передачи в целом.
Цель изобретения - повышение изгибной жесткости и к.п.д. путем устраиения радиальных усилий в зубчатой паре.
Это достигается тем, что рабочие поверхности зубьев в сечении плоскостями, расположенными иод углом 45° к осям колес, выполнены в виде дуг окрзжностей, продольная лп1пш зуба каждого колеса выполнена в виде
кривой, текущий радиус и полярный угол которой выбраны по зависимостям
.1/,
д
+
(f/ +1)
и +1 X У) (U - 1) arctg
и Да,
а общая нормаль к поверхностям зубьев в точке пх касанпя составляет с плоскостью, параллельной осям колес, угол, определяемый по зависимости
, /У2 и +1 X ф arctg - 15
где и - иередаточное число, равное отношению чисел зубьев парного и рассматриваемого колес; uw - кратчайшее межосевое расстояние
передачи;
X - расстояние от торцовой плоскости, в которой лежит текущая точка линии зуба, до межосевого перпендикуляра.
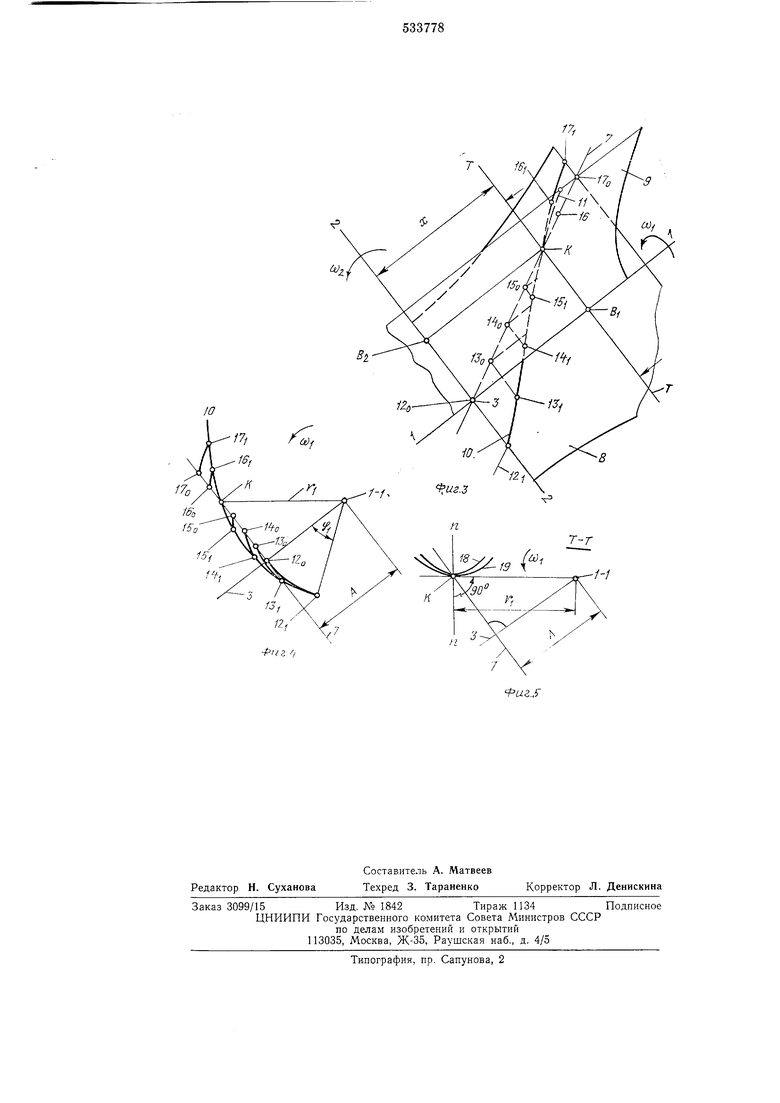
При этом линия зацепления является прямой, составляет с осью одного из колес угол, котангенс которого равен отношению угловой скорости этого колеса к угловой скорости второго, пересекает под прямым углом отрезок кратчайшего межосевого расстояния и делит его в отношении, обратном отношению угловых скоростей. На фиг. 1 и 2 показаны две проекции, схематпчно изображаюш,ие осп колес, профили зубьев, их взаимное расположение и перемеш,ение точки касания вдоль линии зацепления в описываемой зубчатой передаче; на фиг. 3 - начальные поверхпости и расположенные на них продольные, в данном случае действуюшие линии зубьев; на фиг. 4 - продольпая линия зуба шестерни в проекции на ее торцовую плоскость; на фиг. 5 - сечение рабочих поверхностей взаимодействующих зубьев в момент их касания в точке К на фиг. 3плоскости, перпендикулярной к оси тестерпи. Зубчатые колеса с осями 1-1 и 2-2 враш,аются с угловыми скоростями coi и 0)2. Оси 1 - 1 и 2-2 колес скрещиваются под прямым углом (Е 90°) и удалены друг от друга на кратчайшее расстояние а (фиг. 2). Межосевой перпендикуляр {фиг. 2, 4 и 5) обозначен позицией 3. Как известно из кинематики, ось 4мгновенного виитового относительного движения (фиг. 1 и 2) составляет с осями 1 - 1 и 2-2 колес углы 6i и 62 и удалена от них на кратчайшее расстояния ai и ag. FIpi этом выполняются равенства 6i+62 S и ai+a2 au,. Для ортогональных (2 90°) передач передаточное число « 03i/C02 ctg6i. Профили зубьев 5 и 6 очерчены плоскими кривыми, например дугами окружностей (фиг. 2). Раднус дуги профиля зуба 5 обозначен через /1, профиля зуба 6 - через k, а центры их - соответственно через Cj и С (фиг. 1 и 2). В точке /С касания профилей зубьев 5 и 6 проведена общая нормаль п-п (фиг. 2), вертикальная проекция которой на фиг. 1 совпадает с проекциями нрофилей зубьев 5 и 6. 0трезки .-ri и на фиг. 1-3 изображают проекции перпендикуляров, онущеиных из текущей точки /( касания профилей зубьев 5 и 6 на оси 1 - 1 и 2-2 колес. Для повышения изгибной жесткости и ,.filHoliJOJiiJU Ilrl/lЛО1 JJ vjnljrlЛ О „ 1 1 rlл К.Н.Д. передачи путем устранения радиальных усилий в зубчатой паре выполпяется следующее условие: в точке К касания поверхностей зубьев (фиг. 1-5) общая нормаль к ним - быть перпендикулярна к векторам г, и Г2, а также к вектору относительной скоро(,.j,j, -, (фиг 1) т е (1) п г ; 0; п-г., 0; n-Wja 0. Это возможно только в случае компланарности векторов Г, Г2 и Ui2, что выражается равенством нулю смешанного произведения: г -/-2-и 2 0. Указанному условию в частности удовлетворяют точки, расположенные на линии зацепления, которая параллельна мгновенной винтовой оси 4, пересекает под прямым углом межосевой перпендикуляр 3 и делит отрезок кратчайшего межосевого расстояния в отношении обратиом отношению угловых скоростей. Эта прямая и выбрана в качестве линии запеплепия передачи. В неподвижной системе координат, начало которой лежит на оси мгновенного винтового движения, ось 2-2 направлена по межосевому перпендикуляру 3, а оси X и у параллельны осям 1 - 1 и 2-2 колес, прямая 7 описывается уравнениями: U(U-l) г- а,.. (t/ + 1) (t;-Ы) A.z + a, aJ(U + l}. В любой точке /С линии 7 проекции окружных скоростей Vi и У2 колес на плоскость, параллельную осям 1 - 1 и 2-2 колес (фиг. 1), будут равны между собой. На этом основании вектор Ui2 относительной скорости должен составлять с осями 1 - 1 и 2-2 колес углы равные 45°. Профили взаимодействующих зубьев 5 и 6 в точке /С их касания (фиг. 1) удобно расположить в плоскости чертежа (фиг. 2), составляющей с осями 1 - 1 и 2-2 колес углы, равные 45°, и параллельной межосевому перпендикуляру 3. Определим угол -ф (фиг. 2), который составляет общая нормаль п-п в точке К касания профилей зубьев 5 и 6 с плоскостью Q, проходящей через точку /С и параллельной осям 1 - 1 и 2-2 колес. Из построений видно, что отнощение проекций векторов г и г обратно отношению угловых скоростей rjr rrr Ша/Ш;(4) т. е. общая нормаль п-га делит отрезок BiBz в отношении, обратном отношению угловых скоростей колес. Из прямоугольного треугольника SiLAI имеем (фиг. 2) /2.t/ + l. (5) ;с cos 45° (ctg 1 -г 1) tg : : - 2 и а„, aj,,cfgo. Начальные поверхности в передаче могут .быть получены при вращении линии 7 зацеп осей 1-1 и 2-2. В таком слу1 « известно, получаются гиперболопдь 9 вращения (фиг. 3). Радиус горловой окружности начального гиперболоида 8 равен /1, а гиперболоида 9 - соответственно . Геометрически.м местом точек касания убьев, отмеченных на их рабочих поверхностях, будут действующие линии. В описываемой передаче продольные линии 10 и 11 (цоказапные в момент их касания в точке /С на иг. 3), лежат на поверхностях начальных гиерболоидов 8 и 9 и поэтому являются проольными линиями зубьев. Форма продольных линий 10 и 11 зубьев (фиг. 3) зависит от скорости v (фиг. 1) переещения точки /С касания вдоль линии 7 заенления. Эта скорость должна быть вполне пределенной, чтобы точка /С касания профией зубьев 5 и 6 (фиг. 2) являлась одновреенно и точкой касания сопряженных поверхностей зубьев. Иными словами, общая нормаль п-п к профилям зубьев 5 и 6 в точке К их касания должна быть нернендикулярна к вектору относительной скорости (фиг. 1) в движении каждого из профилей зубьев 5 или 6 относительно осей 1 - 1 и 2-2 колес. Из условия перпендикулярности общей нормали п-п к вектору УГ относительной скорости в движении каждого нз профилей зубьев 5 и 6 относительно осей 1 - 1 и 2-2 колес с помощью прямоугольного треугольника GFH найдем скорость v (фиг. 1 и 2) V GH + PHilsin (45° - Sj), где FP K i-y-ig(, PW (i(24-ai)cos45°. После соответствующих преобразований с учетом выражения (5) получим YU- + 1{U + 1) ( f/2 (f/+ 1)2 Из формулы 6 видно, что при перемещении точки Д контакта вдоль линии 7 зацепления скорость V изменяется по параболическому закону. Уравнение продольной линии 10 зуба (фиг. 3 и 4), например шестерни, удобно выразить в цилиндрических координатах (х, г ф;), где г, - |/( 1/ (f/+l) Из треугольника MKBi (фиг. 1), выразив cos 61 через передаточное число и, получим х S-cosS. : ,(7) /u2 + Г где S - текущее расстояние от контактной точки К. до межосевого перпендикуляра 3 по линии 7 зацепления. С учетом формулы 7 формула 6 имеет вид: dS d-iiи + 1 dt a(U-) «I ( +1) X -5 + (U + 1) ,1 dS flcp, :. В D + S a(U-l) l/f/-f I „ aw YV + I - U+1 Проинтегрировав no S и выразив 5 через к, получим угловой параметр X и+ Г fi (U - l)arctg + о, (8) где фо - произвольный постоянный угол. По формуле (8) рассчитаны углы ф1 для текущих точек 12ь ISi, Нь 15ь 16i, 17i (фиг. 3 и 4), через которые проведена продольная линия 10 зуба гиперболоида 8, для передачи со следующими характеристиками зацепления; угол скрещивания осей 2 90°, кратчайшее межосевое расстояние мм, передаточное число « coi/co2 2. При расчете приняты расстояния х торцового сечения гиперболоида 8 до ее горлового -сечения равными соответственно 12,5; 25; 37; 5; 50; 62,5; 75 мм. На линии зацепления 7 соответствующие точки обозначены через 12о, 13о, 14о, 15о, 16о, 17о (фиг. 3 и 4). Аналогичным образом построена продольная линия 11 зуба гиперболоида 9 (фиг. 3). На фиг. 5, плоскость чертежа которого перпендикулярна оси 1-1 гиперболоида 8, построено сечение поверхностей зубьев торцовой плоскостью Т-Т в момент касания продольных линий 10 и 11 зубьев в точке К- Кривые сечения поверхностей зубьев обозначены позициямн 18 п 19. Уравнения поверхностей зубьев не приводятся. Как видно из фиг. 2 и 5, общая нормаль п-п к кривым сечения поверхностей зубьев 18 и 19 в точке К. касания ортогональна радиусам-векторам Г и Го. Следовательно, в описываемой зубчатой паре отсутствуют радиальные составляющие усилия, что повышает изгибную л есткость и к. п. д. передачи. Описываемая зубчатая передача может быть изготовлена, например, с помощью резцов, режущие кромки которых очерчены дугами окружностей радиусов /i и 4 (фиг. 2). При этом резцы перемещают вдоль линии 7 зацепления удовлетворяющей условиям (3) со скоростью V (6) и ор ентируют таким образом, чтобы общая нормаль п-п в точке К касания режущих кромок профилей зубьев 5 и 6 составляла с плоскостью Q угол -ф (5). Применение передачи наиболее целесообразно при консольном расположении колес, например при глобоидном варианте исполнения главной передачи автомобиля. Формула изобретения Зубчатая передача со скрещивающимися под прямым углом осями колес и точечным контактом зубьев, отличающаяся тем, что, с целью повышения изгибной жесткости и к.п. д. передачи путем устранения радиальных усилий в зубчатой паре, рабочие поверхности зубьев в сечении плоскостями, расположенными под углами 45° к осям колес, выполнены в виде дуг окружностей, продольная линия зуба каждого колеса выполнена в виде кривой, текущий радиус и полярный угол которой выбраны по зависимостям (U л- I) fU +1 X , (y-larctg общая нормаль к поверхностям зубьев в точке их касания составляет с плоскостью. параллельной осям колес, угол, определяемый по зависимости 0-arctg(lf где к - расстояние от торцовой плоскости, в которой лежит текущая точка линии зуба, до межосевого перпендикуляра;и - передаточное число, равное отношению чисел зубьев парного и рассматриваемого колес; йу - кратчайшее межосевое расстояние передачи. - Источники информации, принятые во вниние при экспертизе: 1, Авт. св. Хд 109113, кл. F 16Н 1/06, 1956.


| название | год | авторы | номер документа |
|---|---|---|---|
| Способ обработки пары гиперболоидных зубчатых колес | 1973 |
|
SU564931A1 |
| Зубчатая передача со скрещивающимися осями колес | 1976 |
|
SU670757A1 |
| Зубчатая передача | 1976 |
|
SU679748A1 |
| Гиперболоидная зубчатая передача | 1982 |
|
SU1084512A1 |
| Способ обработки пары зубчатых колес | 1978 |
|
SU908558A2 |
| Способ обработки пары зубчатых колес | 1980 |
|
SU963741A2 |
| Червячный инструмент | 1980 |
|
SU931334A1 |
| Гиперболоидная зубчатая передача | 1986 |
|
SU1372128A1 |
| Зубчатая передача с неортогональными пересекающимися осями | 1981 |
|
SU953303A1 |
| СПОСОБ ОБРАБОТКИ МЕТОДОМ ОБКАТКИ ЭВОЛЬВЕНТНЫМ ЧЕРВЯЧНЫМ ИНСТРУМЕНТОМ КОСОЗУБЫХ КОЛЕС | 1972 |
|
SU357049A1 |
-Pnz i
