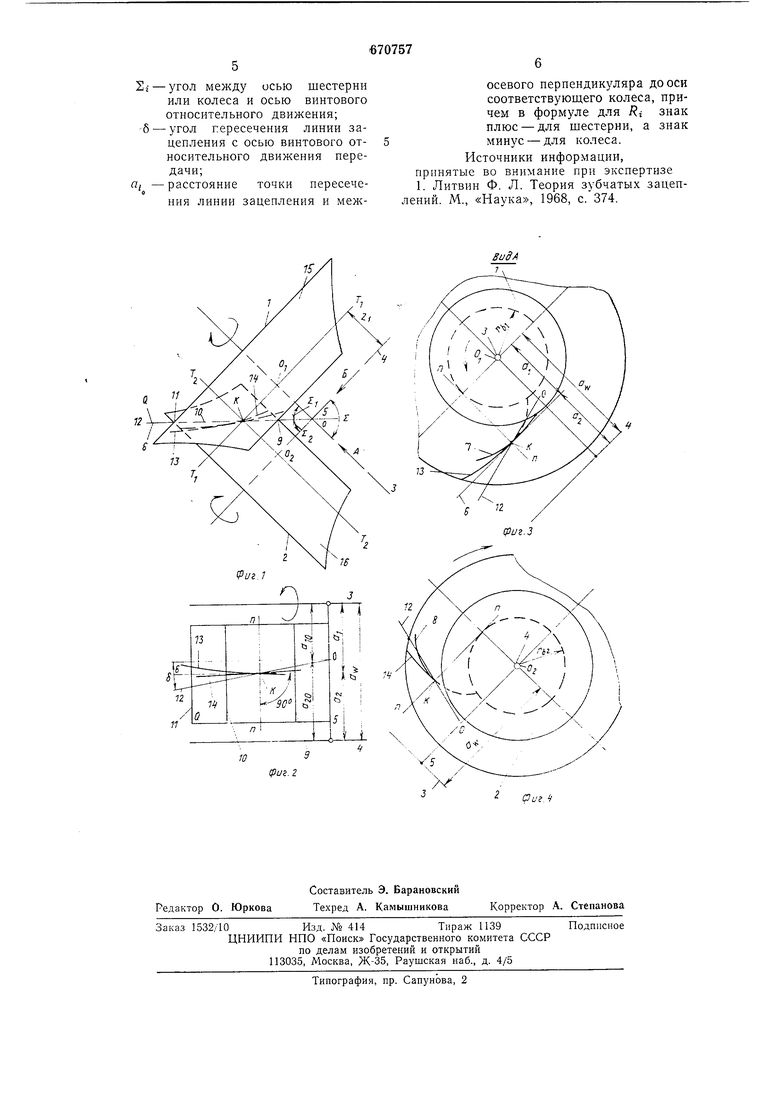
осям колес; на фиг. 2 -скрещивающиеся оси колес, ось их винтового относительного движения и прямая линия зацепления передачи, причем плоскость чертежа параллельна последним двум прямым; на фиг. 3 - вид по стрелке А на фиг. 1, плоскость чертежа которого перпендикулярна оси шестерни (показаны торцовый эвольвентный профиль шестерни, проекция ее продольной линии и проекция линии зацепления, причем парное колесо условно не показано); на фиг. 4 - вид по стрелке Б на фиг. 1, плоскость чертежа перпендикулярна к оси колеса (показаны поперечный эвольвентный профиль зуба колеса вместе с его основной окружностью, проекция продольной линии зуба и линии зацепления, причем шестерня условно не показана).
Передача содержит зацепляющиеся шестерню 1 и колесо 2, оси 3 и 4 которых скрещиваются под углом S и удалены друг от друга на кратчайшее расстояние uw. Межосевой перпендикуляр 5 показан на фиг. 2, 3 и 4. Ось 6 винтового относительного движения (см. фиг. 1-3) составляет с осями 3 и 4 колес углы EI и Ег и удалена от них на кратчайшее расстояние GI и Яа (см. фиг. 2 и 3). При этом выполняются равенства 2i+22 2 и ai-f .
Поперечные профили зубьев в сечении плоскостями Ti-TI и TZ-Тг, перпендикулярными к осям 3 и 4 колес 1 и 2, очерчены эвольвентами 7 и 8 основных окружностей радиусов гь, и Гь,, , которые изменяются по линейному закону Гь. ZjtgEi.
В точке касания К поверхностей зубьев общая нормаль к поверхностям зубьев в этой точке параллельна межосевому перпендикуляру 5. Общая нормаль пересекает под прямым углом ось 6 винтового относительного движения, например, в точке /С.
Таким образом, такая совокупность контактных нормалей, например нормалей 9, 10 и И (см. фиг. 1 и 2), удовлетворяющих условию отсутствия осевых составляющих усилия в зубчатой паре, образует плоскость Q (см. фиг. 1 и 2), проходящую через межосевой перпендикуляр 5 и ось винтового относительного движения колес.
Для образования передачи с нулевой составляющей усилия можно взять в плоскости Q линию зацепления 12, пересекаюЩЗЮ ось 6 винтового относительного движения под углом б и межосевой перпендикуляр 5 в точке О. Расстояние от точки О до оси 3 на фиг. 2 обозначено через аю, а до оси 4 - через Озо.
Текущий радиус Ri и полярный угол ф, продольных линий 13 и 14 взаимодействующих зубьев выбраны но зависимостям
K, y(a,.±Z,J+Zf -L,:
Zi
, sin 2/
cos 2/ cos S
Продольные линии 13 и 14 зубьев лежат на гиперболоидах вращения 15 и 16 (см. фиг. 1).
По этим зависимостям рассчитываются
Kb, , Л , , (см. фиг. 3, 4), а также углы ф1 и фз для текущих точек продольных линий зубьев 13 и 14 шестерни 1 и колеса 2. В качестве примера на фиг. 1-4 взята передача со следующими характеристиками зацепления: угол скрещивания осей 2 90°, кратчайшее межосевое расстояние ащ,50 мм, передаточное число п-2. Как видно из построений, прямая п-п является общей нормалью к поперечным эвольвентным профилям 7 и 8 (см. фиг. 3 и 4) и к продольным линиям зубьев 13 и 14 (см. фиг. 2, 3, 4). Следовательно, п-п является общей нормалью к поверхностям
зубьев в точке их касания /(, и поскольку она параллельна межосевому перпендикуляру 5, то осевая составляющая усилия в этой точке К равна нулю. Аналогичные рассуждения справедливы для любых точек на линии зацепления 12.
Изобретение позволяет исключить осевые усилия в зубчатой паре, устранить необходимость установки упорных подшипников и за счет этого повысить КПД зубчатой передачи со скрещивающими осями колес.
Формула изобретения
Зубчатая передача со скрещивающимися осями колес и точечным контактом взаимодействующих зубьев, рабочие поверхности которых в сечениях, перпендикулярных к осям колес, выполнены в виде эвольвент
окружностей, а линия зацепления взаимодействующих зубьев представляет собой прямую, составляющую угол с осью винтового относительного движения колес, отличающаяся тем, что, с целью устранения осевых усилий в передаче и повыщения КПД, радиусы гь. основных окружностей поперечных эвольвентных профилей зубьев выполнены переменными и изменяющимися по линейному закону
г,. ,,
а текущий радиус г и полярный угол цц продольных линий взаимодействующих зубьев выбраны по зависимостям
УС
tgo
+2ftg %
I. ± Zi COS
Zi
In
sini;
COS ; cos 5
,2 - индекс шестерни и колеса;
Zi - расстояние от торцовой плоскости, в которой лежит текущая точка линии зуба, до межосевого перпендикуляра;
угол между осью шестерни или колеса и осью винтового относительного движения; угол пересечения линии зацепления с осью винтового относительного движения передачи;
расстояние точки пересечения линии зацепления и межосевого перпендикуляра до оси соответствующего колеса, причем в формуле для Ri знак плюс - для шестерни, а знак минус - для колеса. Источники информации, принятые во внимание при экспертизе 1. Литвин Ф. Л. Теория зубчатых зацеплений. М., «Наука, 1968, с. 374.

| название | год | авторы | номер документа |
|---|---|---|---|
| Зубчатая передача | 1976 |
|
SU679748A1 |
| Зубчатая передача со скрещивающимися под прямым углом осями колес | 1973 |
|
SU533778A1 |
| Способ обработки пары гиперболоидных зубчатых колес | 1973 |
|
SU564931A1 |
| Способ изготовления червячной передачи | 1979 |
|
SU837636A1 |
| СПОСОБ ОБРАБОТКИ МЕТОДОМ ОБКАТКИ ЭВОЛЬВЕНТНЫМ ЧЕРВЯЧНЫМ ИНСТРУМЕНТОМ КОСОЗУБЫХ КОЛЕС | 1972 |
|
SU357049A1 |
| Способ обработки пары зубчатых колес | 1980 |
|
SU963741A2 |
| Червячная фреза | 1974 |
|
SU680826A1 |
| Способ нарезания червячного колеса | 1980 |
|
SU952480A1 |
| МОДИФИЦИРОВАННАЯ ЭВОЛЬВЕНТНАЯ ЗУБЧАТАЯ ПЕРЕДАЧА | 1997 |
|
RU2128303C1 |
| ГИПОИДНАЯ ПЕРЕДАЧА | 1991 |
|
RU2019762C1 |
W Э
