1
Изобретение относиться к. машиностроительной промышленности, а именно к зубчатым передачйм типа гипоидных.
Наиболее близкой по технической сущности к изобретению является зубчатая передача, содержащая два зацепляющихся колеса со скрещивающимися осями и точечным касанием зубьев, поперечные профили которых выполнены в виде плавных кривых, например в виде эвольвент окружностей, а линия зацепления представляет собой прямую, составляющую угол с осью вкнтсюого относительного движения колес ОД.
Недостатком этой передачи является низкая несущая способность вследствие контакта двух выпуклых сопряженных поверхностей с больщой приведенной кри- .
Целью изобретения является повышение несущей способности зубчатой передачи за счет обеспечения в протессе зацепления нулевой приведенной кривизны сопряженных поверхностей в их нормальных сечениях вдоль вектора относительной скорости.
i Цель достигается тем,, что продольные линии зубьев в точке их касания выполнены ортогональными линии зацепления, определяемой из уравнений:
7sin -Xco9)
sinSiSinSz
v--a tgfV
a текущие радиусы и полярные углы продольных линий зубьев выбраны по зависимостям:
.())) ,
It - ssiyi 1 sin-у
ма siii2: sinC2 -vA sin(T:2-v)
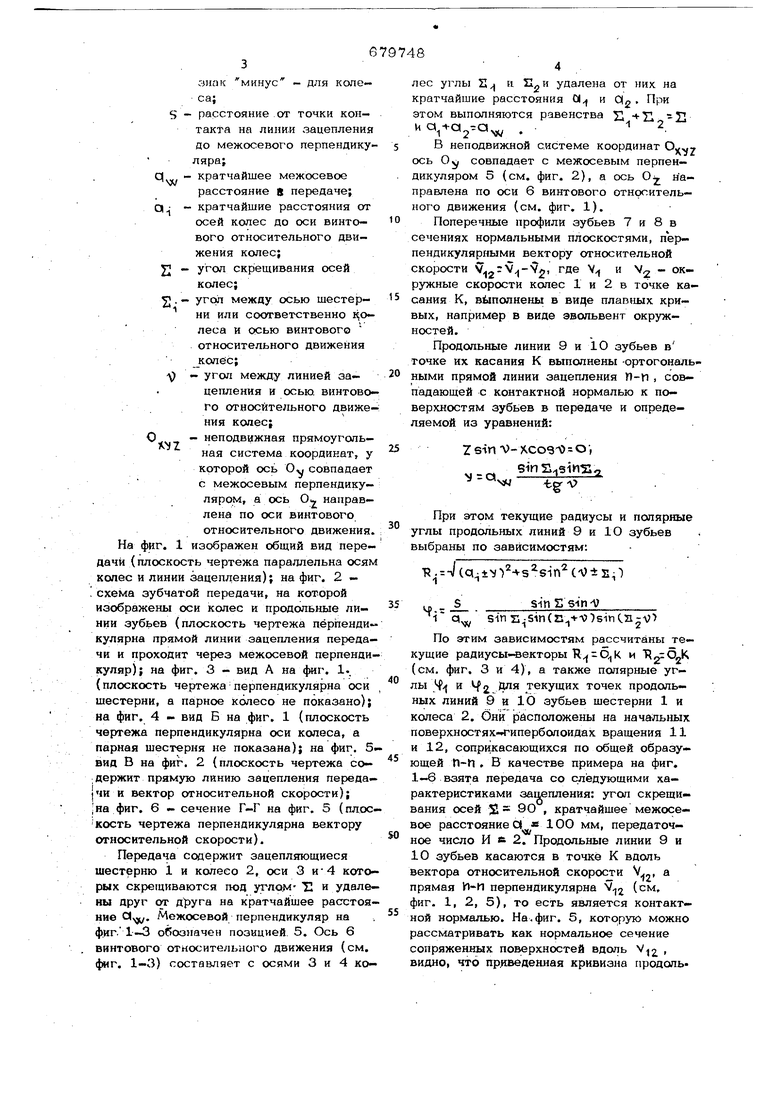
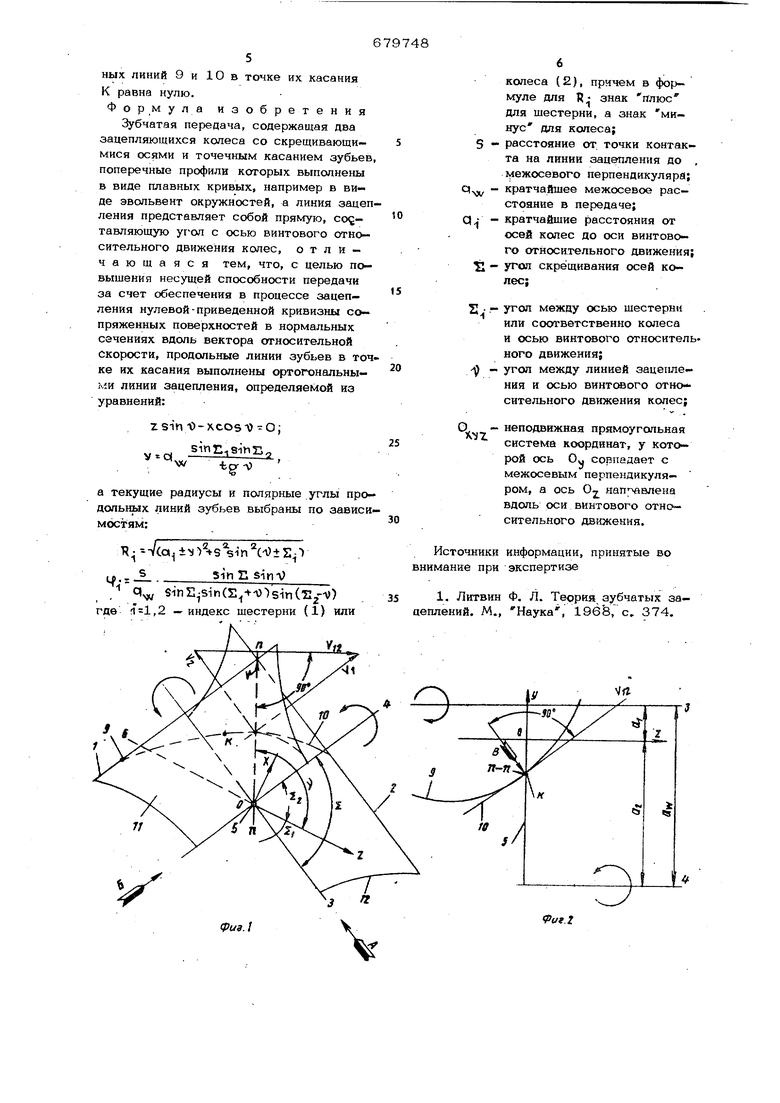
где 1 a;l,2 - индекс шестерни (1) или колеса (2), причем в формуле для R-j знак плюс - для шестерни, а минус для коле- S - расстояние от точки контакта на лини.и зацепления до межосевого перпендикуляра;- кратчайшее межосевое расстояние в передаче; а - кратчайшие расстояния от осей колес до оси винтового относительного движения колес; 2 - угол скрещивания осей 2 . угол между осью тестер- ни или соответственно i oлеса и осью винтового относительного движения колёс; -угол между линией зацепления и осью, винтового относительного движения колес; -неподвижная прямоугольная система координат, у которой ось Оу совпадает с межосевым перпендикуляром, а ось Ow направлена по оси винтового относительного движения. На фиг. 1 изображен общий вид передачи (плоскость чертежа параллельна осям колес и линии зацепления); на фиг. 2 - . схема зубчатой передачи, на которой изображены оси колес и продольные линии зубьев (плоскость чертежа перпендикулярна прямой линии зацепления передачи и проходит через межосевой перпендикуляр); на фиг. 3 - вид А на фиг. 1., {плоскость чертежа - перпендикулярна оси шестерни, а парное колесо не показано); на фиг. 4 - вид Б на фиг. 1 (плоскость чертежа перпендикулярна оси колеса, а парная шестерня не показана); на фиг. 5 вид В на фиг. 2 (плоскость чертежа содержит прямую линию зацепления переда- {чи и вектор относительной скорости); Iна фиг. 6 - сечение Г-Г на фиг. 5 (плос кость чертежа перпендикулярна вектору относительной скорости). Передача содержит зацепляющиеся шестерню 1 и колесо 2, оси 3 и4 которых скрещиваются под утлом- TI и удалены друг от друга на кратчайшее расстояние C(gi/. Межосевой перпендикуляр на фиг. 1-3 обозначен позицией. 5. Ось 6 винтового относительного движения (см. фиг. 1-3) составляет с осями 3 и 4 ко- 6 8 лес углы Ц и S и удалена от них на и а„ . При кратчайшие расстояния 01 VS--2 этом выполняются равенства . в неподвижной системе координат О,. ось О совпадает с межосевым перпендикуляром 5 (см. фиг. 2), а ось О направлена по оси 6 винтового относительного движения (см. фиг. 1). Поперечные профили зубьев 7 и 8 в сечениях нормальными плоскостями, перпендикулярными вектору относительной скорости Ч, где V и V2 - окружные скорости колес 1 и 2 в точке касания К, в 1полнены в вице плавных кривых, например в виде эвольвент окружностей. Продольные линии 9 и 10 зубьев в точке их касания К выполнены -ортогональными прямой линии зацепления П-П , совпадающей с контактной нормалью к поверхностям зубьев в передаче и определяемой из уравнений: Z sin V- SCOSO О, SinS-jSintl tgrV При этом текущие радиусы и полярные углы продольных линий 9 и 1О зубьев выбраны по зависимостям: R . W (О. ±N( (Л) ± S. ) S-in S 5ln М Ч, - J. Г 0 sin s.sin()sin(.a-v По этим зависимостям рассчитаны текущие радиусы екторы и (см. фиг. 3 и 4), а также полярные углы Ч- и Ц 2 Для текущих точек продольных линий 9 и 10 зубьев шестерни 1 и колеса 2. Они рйсположены на начальных поверхностях-гиперболоидах вращения 11 и 12, соприкасающихся по общей образующей tl-h . В качестве примера на фиг. 1-6 взята передача со следующими характеристиками зацепления: угол скрещивания осей S 9О , кратчайшее межосе- вое расстоянием 100 мм, передаточное число И ft 2. Продольные линии 9 и 10 зубьев касаются в точке К вдоль вектора относительной скорости V., а прямая И-И перпендикулярна V ( фиг. 1, 2, 5), то есть является контактной нормалью. На.фиг. 5, которую можно рассматривать как нормальное сечение сопряженных поверхностей вдоль V , видно, что пр.иведенная кривизна продольных линий 9 и 10 в точке их касания К равна нулю. Фор,мула изобретения Зубчатая передача, содержащая два зацепляющихся колеса со скрещивающимися осями и точечным касанием зубье поперечные профили которых выполнены в виде плавных кривых, например в виде эвольвент окружностей, а линия заце ления представляет собой прямую, тавляющую угол с осью винтового относительного движения колес, отличающаяся тем, что, с целью по вышения несущей способности передачи за счет обеспечения в процессе зацепления нулевойприведенной кривизны сопряженных поверхностей в нормальных сечениях вдоль вектора относительной Скорости, продольные линии зубьев в то ке их касания выполнены ортогональными линии зацепления, определяемой из уравнений: zsin O-xcosT) -О; Sin S sins у Vd, a текущие радиусы и полярные углы пр долыплх линий зубьев выбраны по завис мостям: K Vcoi ± - S%inVlS ) sin И sinV c|. -i.. q einIl sin()sin(22-v) где ,2 -индекс шестерни (1) или колеса (2), причем в формуле для R- знак гглюс для щестерни, а знак минус для колеса; расстояние от точки контакта на линии зацепления до , межосевого перпендикуляра; кратчайшее межосевое расстояние в передаче; кратчайшие расстояния от осей колес до оси винтового относительного движения; угол скрещивания осей колес;угол между осью шестерни или сошветственно колеса и осью винтсжого относительного движения; угол между линией зацепления и осью винтсдаого относительного движения колес; неподвижная прямоугольная система координат, у которой ось Оу совпадает с межосевым перпендикуляром, а ось Oj нап;тавлена вдоль оси винтового отно«сительного движения. информации, принятые во экспертизе Ф. Л. Теория зубчатых за, Наука, 196&; с, 374,
Физ.1
Риг.2
| название | год | авторы | номер документа |
|---|---|---|---|
| Зубчатая передача со скрещивающимися осями колес | 1976 |
|
SU670757A1 |
| Зубчатая передача со скрещивающимися под прямым углом осями колес | 1973 |
|
SU533778A1 |
| Зубчатая передача для винтовых компрессоров и насосов | 1980 |
|
SU1032255A1 |
| Способ обработки пары зубчатых колес | 1980 |
|
SU963741A2 |
| Зубчатая передача | 1976 |
|
SU599115A1 |
| ГИПОИДНАЯ ПЕРЕДАЧА | 1991 |
|
RU2019762C1 |
| СПОСОБ И ИНСТРУМЕНТ ДЛЯ ИЗГОТОВЛЕНИЯ ПЛОСКИХ ЗУБЧАТЫХ КОЛЕС | 2010 |
|
RU2542040C2 |
| Червячный инструмент | 1980 |
|
SU931334A1 |
| Способ обработки зубчатых колес | 1978 |
|
SU740420A2 |
| Способ обработки пары зубчатых колес | 1978 |
|
SU908558A2 |

