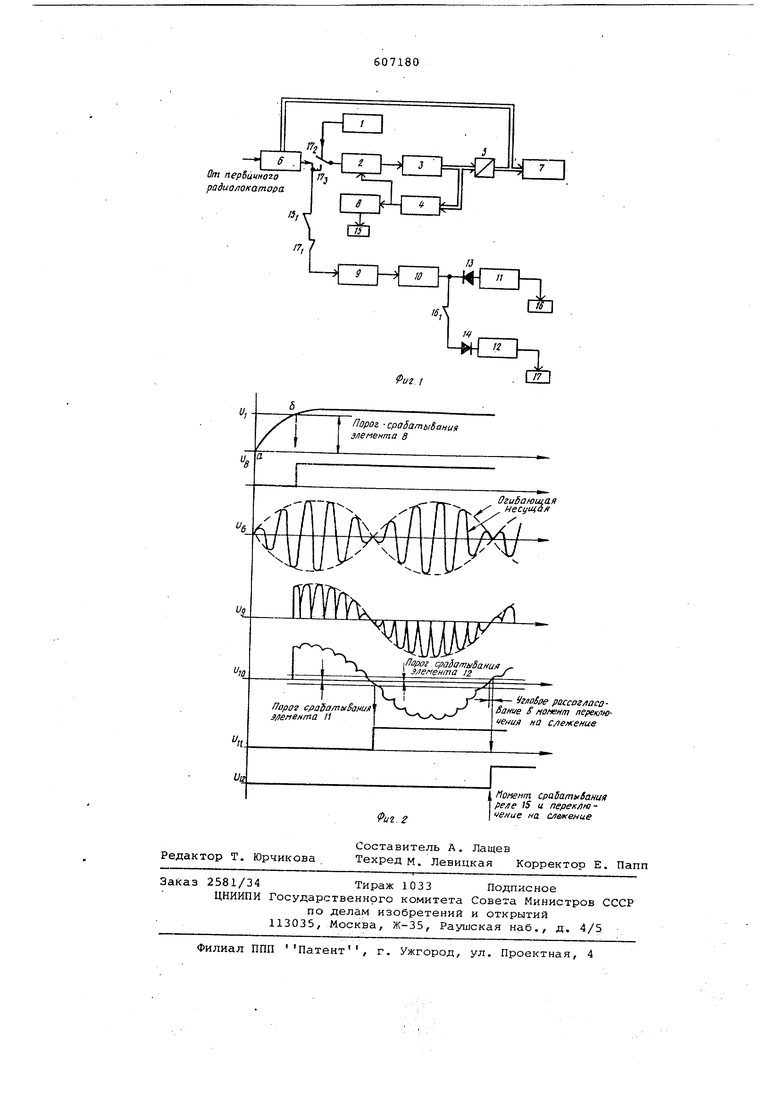
Изобретение относится к области ав томатики и может быть использовано в следующих приводах радиолокаторов.. Известны устройства для синхрониза,ции ведущего и ведомого объектов, осуществляющие непосредственную синхронизацию объектов, путем прямого включения ведомого объекта на режим слежения l и 2. Из известных устройств для синхронизации объектов наиболее близким по технической сущности к предлагаемому, является устройство, содержащее интегр тор и усилитель, выходом подключенный к обмотке управления двигателя, вал которого механически соединен с якорем тахогенератора и через редуктор с ротороМ сельсина-приемника и исполнитель ным органом, при этом тахогенератор подключен к первом у входу усилителя и через первый пороговьтй элемент к обмот ке первого реле .2J. Недостатком известных устройств для синхронизации .объектов является их малая надежность. Целью изобретения является повышение надежности устройства. Это достигается тем, что в известное устройство для синхронизации объек тов дополнительно установлены демодулятор, фильтр, первый и второй выпрямители, второй и третий пороговые элементы и второе и третье реле. Причем обмотка второгр реле через последователь но соедйнённые второй пороговый элемент,первый выпрямитель, фильтр, демодулятор, первые размыкающие контакты третьего реле и замыкающие контакты первого реле подключена к сельсину-прие«1нику, выход фильтра через последовательно соединенные замыкающие контакты второго реле, второй выпрямитель и третий пороговый элемент соединен с обмоткой третьего реле, а интегратор через вторые размыкающие контакты третьего реле и сельсин-приемник через замыкающие контакты третьего реле подключены к второму входу усилителя. На фиг. 1 представлена структурная схема устройства для синхронизации объектов; на фиг., 2 изображены временные диаграммы, его работы. Устройство содержит интегратор 1, усилитель 2, двигатель 3, тахогенератор 4, редуктор 5, сельсин-приемник 6, исполнительный орган 7, пороговый элемент 8, демодулятор 9, фильтр 10, пороговые элементы 11 и 12, выпрямители 13 и 14, реле 15 и его замыкающие к он так ты 15 реле 16 и его замыкаю.щие контакты 16 , реле 17 и- его раз-) мыкающие контакты 17. и 17 и замыкающи контакты 17з .
На фиг. 2 приняты следующие обозначения: и - выходное напряжение тахогенератора, Ug - выходное напряжение порогового элемента 8, Ux - выходное напряжение сельсина-приемника, U -выходное напряжение демодулятора, U выходное напряжение фильтра, U и
выходное напряжение пороговых элементов 11 и 12.
Устройство работает следующим образом.
До включения в режим слежения устройство работает как разомкнутая система от интегратора 1, напряжение на выходе которого плавно нарастает(на фиг. 2 временная диаграмма U , участок а б нарастания скорости). Напряжение попадает на вход усилителя 2 и с его выхода поступает на двигатель 3, который приводит в движение тахогене15атор 4, .а через редуктор 5 сельсинприемник 6 и орган 7. Порог, срабатывания . порогового элемента 8 выставляеТ ся в зависимости от скорости ведущего объекта. По достижении органе. 7 требуемой скорости напряжение с тахогенератора 4 достигает порога срабатывания элемента 8, р1еле 15 срабатывает и подает через свои замыкающие контакты 15 напряжение с сельсина-приемника 6 на демодулятор 9. Демодулятор производит Фазочувствительное выпрямление сигнала, этот сигнал сглаживается фильтром 10.
Сглаженный сигнал поступает на пороговый элемент 11. После срабатывания элемента 11 реле 16 срабатывает, становится на самоблокировку и подает через свои замыкающие контакты 1б;( напряжение с фильтра 10 на пороговый элемент 12. Такая последовательность в анализе огибающей напряжения сельсина-приемника б введена с целью исключения синхронизации системы в ложном нуле, т.е. при угловом рассогласовании ведущего и ведомого объектов- в 180-.
При поступлении на вход элемента 12 положительного напряжения последНИИ срабатывает, одновременно срабатываем реле 17 и становится на самоблокировку, отключает демодулятор 9,
фильтр 10 и элементы 11,12 и подклю- . чает сельсин-приемник на вход усилителя 2, т.е. переключает все устройство на режим слежения. Это происходит в момент времени, когда угловое рассогласование между ведущим и ведомыл объектами близко к нулю.
Использование изобретения обеспечивает плавную безударную синхронизацию ведомого и ведущего объектов и исключает тем самым возможность до-I ломки конструкции.
Формула изобретения
Устройство для синхронизации объектов, содержащее интегратор, усилитель, выход которого подключен к обмотке управления двигателя, вал которого механически соединен с якорем тахогенератора и через редуктор с ротором сельсина-приемника и исполнительным органом, а тахогенератор подключен к первому входу усилителя и через первый пороговый элемент к обмотке первого реле, отличающееся тем, что, с целью повышения надежности устройства, оно содержит демодулятор, фильтр, первый и второй вьшрямители, второй и третий пороговые элементы и второе и третье реле, причем обмотка второго реле через последовательно соединенные второй пороговый элемент, первый выпрямитель , фильтр, демодулятор, первые размыкающие контакты третьего реле и замыкающие контакты первого реле подключена к сельсину-приемнику, выход фильтра через последовательно соединенные замыкающие контакты второго реле, второй выпрямитель и третий пороговый элемент соединен с обмоткой третьего реле, а интегратор через вторые размыкающие контакты третьего реле и сельсин-приемник через замыкающие контакты третьего реле подключены к второму входу усилителя.
Источники информации, принятые во внимание при экспертизе:
1 .Г.андлевский М.М. Силовой следящий привод, М., ГИОП, 1957, с. 141149.
2. Патент Франции 2087055, кл. G05 D 13/00, 04.05.70.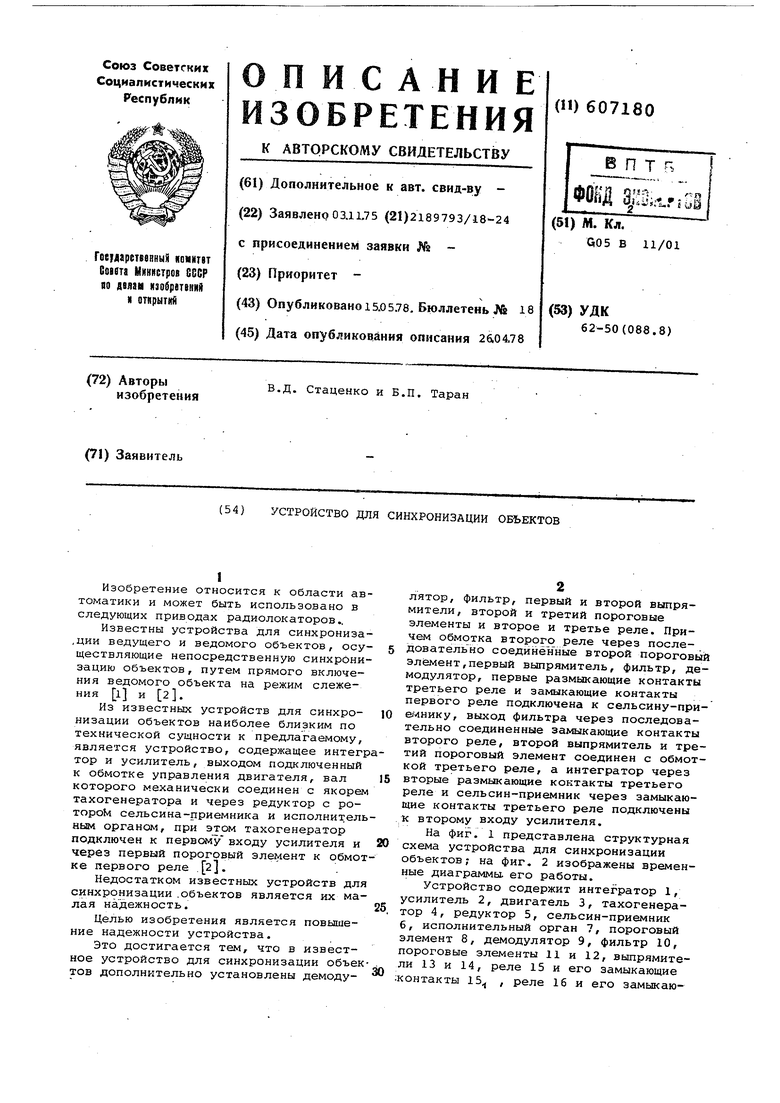
| название | год | авторы | номер документа |
|---|---|---|---|
| Регулятор подачи долота | 1982 |
|
SU1127970A1 |
| Устройство для управления ступенчатой коробкой передач транспортного средства | 1977 |
|
SU686911A1 |
| ПРЕОБРАЗОВАТЕЛЬ ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ | 2006 |
|
RU2325620C2 |
| Следящий электропривод | 1980 |
|
SU903804A1 |
| Устройство для управления электроприводом кристаллизатора установки непрерывной разливки металла | 1971 |
|
SU442885A1 |
| Устройство для отработки заданногоположения регулирующего органа | 1973 |
|
SU508779A1 |
| Кодовая рельсовая цепь переменного тока | 1988 |
|
SU1613374A1 |
| Устройство для формирования команды управления светофором | 1978 |
|
SU750542A1 |
| Устройство для оптимизации фотосинтеза растений | 1989 |
|
SU1690611A1 |
| Способ уменьшения неравномерности хода шпинделей прокатного стана и устройство для его осуществления | 1980 |
|
SU908448A1 |