Изобретение относится к прецизионному приборостроению, а точнее к гироскопическому электроприводу на базе гистерезисного двигателя.
Цель изобретения - повышение точности гиросистемы путем обеспечения гаран- тированного скольжения с заданной разницей частот.
Сущность изобретения иллюстрируется фиг.1 и фиг.2.
Гиродвигатели 1 и 2 подключены к инвертору 3 через общий блок импульсного намагничивания 4, с управляющим входом которого соединен выход блока формирования параметра импульсов намагничивания 5 (длительности, частоты и фазы), вход блока синхронизации 6 соединен с двумя фазами инвертора, а выход - с входом блока 5. В одну из фаз гиродвигателя 2 включено дополнительное комплексное сопротивление (Zg)7.
Изложим основы физики предложенного решения. При импульсном намагничивании возможны два режима работы гистерезисного двигателя - синхронный со .стабилизацией частоты вращения и асинхронный, когда ротор скользит. Исследованиями установлено, что при неизменных параметрах импульсов, частоты скольжений 2-х и более однотипных двигателей отличаются мало. Зоны синхронной работы практически с точностью до 5-10% совпадают. Это не позволяет использовать обычное импульсное намагничивание для достижения поставленной цели.
Установлено, что граница синхронной работы определяется условием замыкания результирующего вектора тока в определенной зоне синхронно-вращающихся координат UV (см.фиг.2), ограниченных траекторий АВВГД, где границы АБ, ДГ определяются соответственно максимальным синхронным двигательным и генераторными моментами, граница БВГ - это требуемый в импульсе для намагничивания ток, АД - режим работы перевозбужденного двигателя.
Траектория нарастания и спада тока Ai BL которая укладывается в АВВГД - это зона синхронного намагничивания Аа Ва ; обеспечивает опережающее намагничивание ротора, что создает скольжение.
Фазовое положение амплитуды импульса тока в траектории Аа Ва зависит от фазы импульса, его амплитуды и длительности, параметров схемы замещения гиродвигателей. Суть предлагаемого решения состоит в детерминированном задании двух разных траекторий перемагничивания Аа Ва для двух двигателей, что гарантирует получение разных скольжений.
Гиродвигатели 1 и 2 разгоняются от общего инвертора 3, после разгона включаются намагничивающие импульсы, формируемые блоками 4 и 5. Параметры намагничивающих импульсов на гиродвйгате,лях одинаковы, но за счет разной эквивалентной индуктивности статоров из- за дополнительного комплексного сопротивления 7 создаются разные траектории намагничивания, что определяет разное фаз овре положение намагниченности и разное скольжение.
Таким образом достигается одновременное решение ряда задач - минимизация потребления и стабилизации энергетических характеристик, задание требуемого скольжения каждому двигателю, что устраняет перекрестные связи между гиродвигателями в гироплатформе с повышением ее точности.
Формула изобрегения Электропривод гироскопов в составе гироплатформы, содержащий п трехфазных гистерезисных гиродвигателей, источник питания, первый и второй выходы которого соединены с соответствующими первым и вторым входами первого гиродвигателя, а третий выход источника питания соединен через блок импульсного намагничивания с
третьим входом первого гиродвигателя, блок формирования параметров импульсов намагничивания, выход которого соединен с управляющим входом блока импульсного намагничивания, отличающийся тем, что, с целью повышения точности гироплатформы путем разнесения частот вращения гиродвигателей, второй и последующие ги- родвигатели подсоединены параллельно первому гиродвигателючерез вновь введен- ные индивидуальные комплексные сопротивления.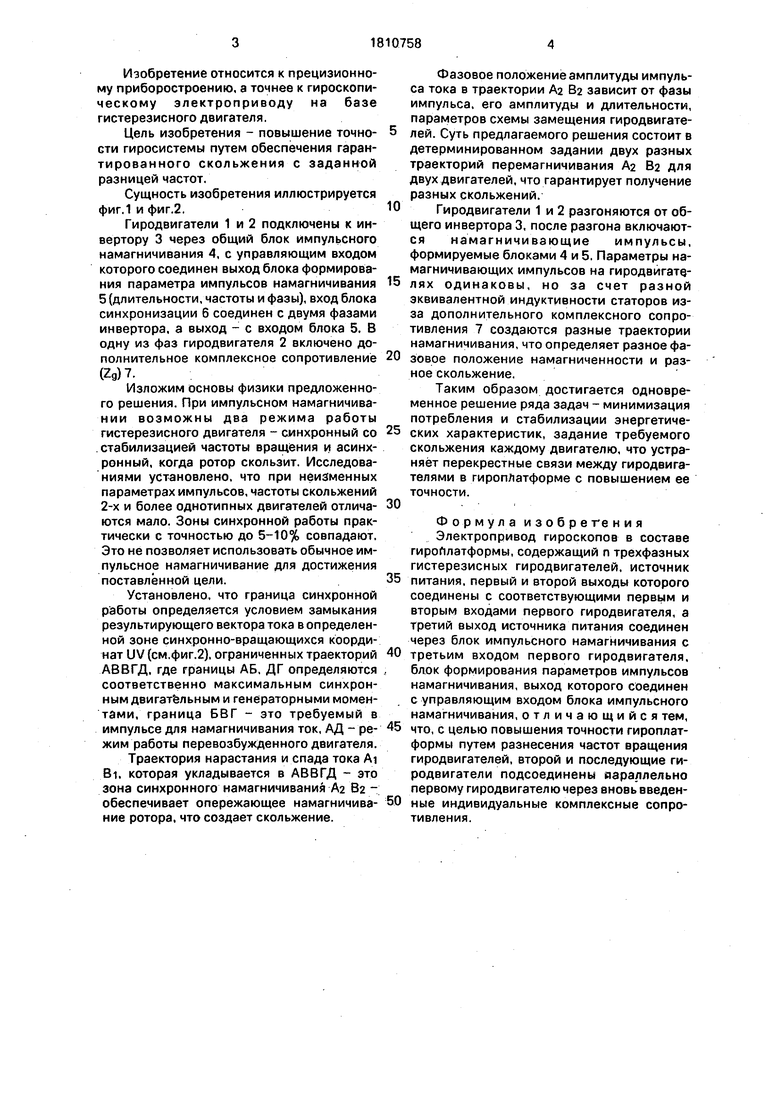
| название | год | авторы | номер документа |
|---|---|---|---|
| Гистерезисный электропривод ротора гироскопа | 1972 |
|
SU534015A1 |
| Электропривод гироскопа | 1990 |
|
SU1810757A1 |
| Гистерезисный электропривод | 1984 |
|
SU1270860A1 |
| Способ управления гистерезисным электродвигателем | 1984 |
|
SU1272457A1 |
| Способ подготовки к работе гироскопа с трехфазным гистерезисным двигателем | 1990 |
|
SU1795283A1 |
| Частотнорегулируемый электропривод | 1978 |
|
SU767927A1 |
| Способ управления гистерезисным электродвигателем | 1981 |
|
SU1008876A1 |
| Способ управления гистерезисным двигателем гироприбора | 1981 |
|
SU1084935A1 |
| Гистерезисный электропривод | 1986 |
|
SU1328920A2 |
| Электропривод с гистерезисным электродвигателем | 1972 |
|
SU530407A1 |
Предложение относится к прецизионному приборостроению. Цель - повышение точности гиросистемы. Поставленная цель достигается тем, что многодвигательный гистерезисный электропривод с двумя 1,2 или более двигателями подключен к общему инвертору напряжения 3. Блоки импульсного намагничивания 4, 5 формируют по фазам двигателей импульсы. Введение в -одну из фаз гиродвигателей индивидуального комплексного сопротивления создает у каждого двигателя свои сдвиги фазы намагниченности ротора и разное скольжение. 2 ил.
| Делекторский Б.А | |||
| и Тарасов В.Н | |||
| Управляемый гистерезисный привод, М.: Энергоатомиздат, 1983, с.104. |
