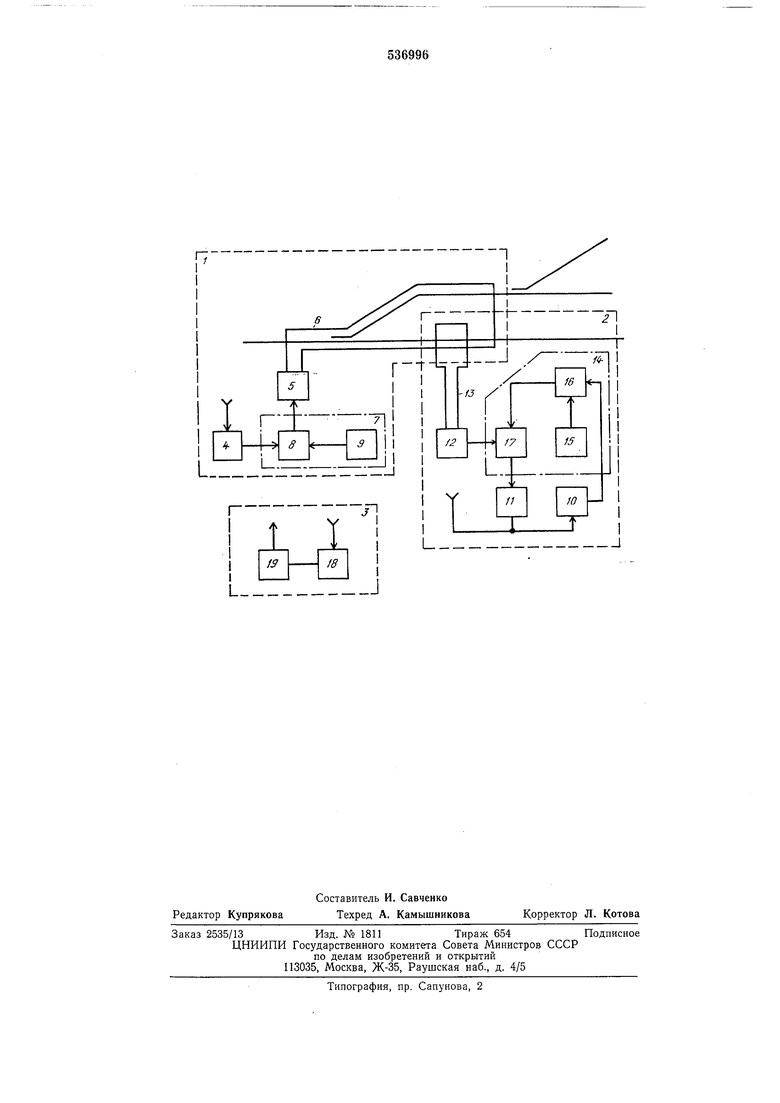
ватель 14 кода подвижного объекта, взаимосвязанный с приемником 10 синхроимпульса, передатчиком 11 информации и приемником 12. Формирователь 14 содержит кодовую вставку 15 номера подвижного объекта, подключенную к последовательно соединенным смесителям 16 и 17.
Приемопередатчик 3 содержит приемник 18 информации и связанный с ним передатчик 19 синхроимпульса.
Работа устройства осуществляется следующим образом.
Передатчик 19 синхроимпульса диспетчерского приемопередатчика 3 периодически посылает в канал связи синхроимпульс, который принимается приемником 4 синхроимпульса каждого узла обнаружения подвижного объекта 1 и приемником 10 синхроимпульса приемопередатчика 2, установленного на каждом подвижном объекте. В устройстве реализуется временное разделение каналов, поэтому в соответствующий момент времени каждым приемопередатчиком 2 формируется с помощью формирователя 14 кода подвижного объекта соответствующая информация и через передатчик И информации передается на диспетчерский приемопередатчик 3.
Время связи с каждым приемопередатчиком 2 рассчитано на передачу как информации, формируемой на подвижном объекте (формирователем 14), так и формируемой узлом 1 обнаружения подвижного объекта (формирователем 7). Поэтому при нахождении подвижного объекта вне зоны любого контрольного пункта на диспетчерский пункт будет поступать информация, формируемая только на подвижном объекте, поскольку канал связи между узлом 1 обнаружения подвижного объекта и приемопередатчиком 2 подвижного объекта локального действия - индуктивная связь.
При нахождении подвижного объекта в зоне контрольного пункта в соответствующий момент времени узлом обнаружения подвижного объекта, в частности формирователем 7 кода контрольного пункта и генератором 5, нагруженным на индуктивный щлейф 6, вырабатывается информация, характеризующая данный контрольный пункт. Последняя поступает через индуктивный шлейф 13 приемопередатчика 2 подвижного объекта и приемник 12 на смеситель 17 формирователя 14 и далее через передатчик 11 информации на диспетчерский пункт.
Таким образом, код местоположения подвижного объекта формируется кодовой вставкой 9 номера контрольного пункта, смесителем 8 и приемником 4 синхроимпульсов, затем при наличии на контрольном пункте подвижного объекта указанная информационная посылка через индуктивный канал связи (генератор 5, индуктивные щлейфы 6, 13, приемник 12) поступает в смеситель 17. Кодовой вставкой 15 номера подвижного объекта, прнемпиком 10 синхроимпульса и смесителем 16 формируется информация, характеризующая подвижный объект (номер электровоза, ориентировка состава, качественный признак состава и т. п.), и поступает на смеситель 17. С выхода последнего информация, характеризующая контрольный пункт и подвижный объект, передается через передатчик 11 на диспетчерский пункт.
С пункта контроля информация поступает лишь при наличии в его зоне контролируемого объекта, причем указанная информация формируется с минимальными затратами технических средств; для узла обнаружения подвижного объекта требуется лишь простейший генератор, связанный с индуктивным шлейфом. Кроме того, на контрольном пункте одновременно может находиться неограниченное число подвижных объектов, перемещающихся с различной скоростью либо располагающихся неподвижно.
Формула изобретения
Устройство для определения местоположения подвижного объекта, содержащее установленных в пупктах контроля узлы обнаружения подвижного объекта, каждый из которых включает приемник синхроимпульса и генератор, связанный с индуктивным шлейфом, охватывающим площадь контрольного пункта,
установленные на подвижных объектах приемопередатчики, каждый из которых включает взаимосвязанные приемник синхроимпульса и передатчик информации, и приемник, связанный с индуктивным шлейфом, взаимодействующим со шлейфом контрольного пункта, отличающееся тем, что, с целью получения информации о нахождении нескольких подвижных объектов на одном контрольном пункте и упрощения устройства, оно снабжено
установленным на диспетчерском пункте приемопередатчиком, а каждый узел обнаружения на контрольном пункте и приемопередатчик на подвижном объекте - формирователями кода номера контрольного пункта и подвижпого объекта, первый нз которых соединен с приемником и генератором узла обнаружения, а второй - с приемником синхроимпульса, передатчиком информации и приемником.
Источники информации, принятые во внимание при экспертизе:
1.Авт. св. № 310284, кл. В 611 3/20, 1970
2.Чапцев К. А. Электронные автоматы для опознавания вагонов и грузов. Труды
Днепропетровского института железнодорожного транспорта, вып. 123, М., с. 13-17, 1971.
п
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ДИСПЕТЧЕРСКОГО УПРАВЛЕНИЯ НАЗЕМНЫМ ТРАНСПОРТОМ | 1995 |
|
RU2113013C1 |
| Устройство для сбора информации с рассредоточенных объектов | 1980 |
|
SU942110A2 |
| Система сбора информации для рассредоточенных объектов | 1974 |
|
SU532116A1 |
| Система обмена информацией между локомотивом и диспетчерским пунктом | 1989 |
|
SU1787853A1 |
| Устройство для дистанционного контроля защитных потенциалов трубопроводов | 1980 |
|
SU934844A1 |
| СИСТЕМА ДИСПЕТЧЕРСКОГО УПРАВЛЕНИЯ НАЗЕМНЫМ ТРАНСПОРТОМ | 1995 |
|
RU2113014C1 |
| Устройство для централизованного контроля и управления движением транспортных средств | 1985 |
|
SU1317467A1 |
| Устройство для контроля и управления городским электротранспортом | 1983 |
|
SU1120392A1 |
| Система контроля целостности состава | 2015 |
|
RU2614158C1 |
| СИСТЕМА ДИСПЕТЧЕРСКОГО КОНТРОЛЯ И УПРАВЛЕНИЯ ИНКАССАТОРСКИМИ МАШИНАМИ | 2011 |
|
RU2463665C1 |