1
Устройство относится к области автоматики и вычислительной техники и может быть использовано в различных отраслях промышленности с целью автоматического измерения, регулирования и управления.
Известны устройства для начальной установки датчиков и преобразователей, содержащие механический дифференциал, сервопривод, датчик начального кода.
Эти устройства не обладают большой точностью.
Наиболее близким техническим решением к данному является устройство, позволяющее более точно устанавливать в начальное положение преобразователи положение - код. Это устройство для определения положения содержит преобразователь положение - «од, а также распределитель импульсов, выход которого подключен к входу преобразователя угол- код, двигатель вал которого соединен с валом преобразователя, датчик начального кода и преобразователь кода, блоки сравнения, триггер, блоки управления реверсом, скоростью вращения и выключением двигателя.
Указанное устройство имеет такие недостатки, как сложность кинематики, проявляющуюся в наличии механического дифференциала, который необходимо устанавливать в непосредственной близости от преобразователя угол-код, а также наличие серводвигателя со
схемой управления по типу следящей системы. Кроме того, известное устройство инерционно, имеет сравнительно невысокую надежность и динамические ошибки и требует довольно продолжительного времени для установки в начальное положение.
Цель изобретения - повыщение быстродействия и надежности устройства. Для этого в устройство введены блок образования обратного кода, блок памяти и сумматор, выход преобразователя положение - код подключен к первому входу сумматора непосредственно и к второму входу через последовательно соединенные блок образования обратного кода и блок памяти. Текущее значение прямого кода поступает в сумматор, в котором происходит сложение его с некоторой постоянной величиной. Эта постоянная величина образуется при настройке в начале работы преобразователя положение - код следующим образом. Начальное значение кода преобразователя поступает в блок обращения кода или, в частном случае, в блок образования обратного кода, затем по сигналу управления
«Запись заносится в блок памяти (например, регистр со статической памятью) и хранится там до следующей настройки преобразователя. Имеется также возможность ввода данной постоянной величины в блоке памяти вручную. Выход блока памяти присоединен к вхолу сумматора. Та.ким образом, на сумматоре происходит сложение двух кодов: текущего значения прямого кода, поступающего с преобразователя положение - код, и дополнительного кода постоянной величины, занесенного ,в блок памяти. Данный дополнительный код образуется из обращенного кода путем прибавления «-|-Ь к младшему разряду сумматора. Таким образом, па выходе сумматора получаем значение координаты положения контролируемого объекта в заданном коде.
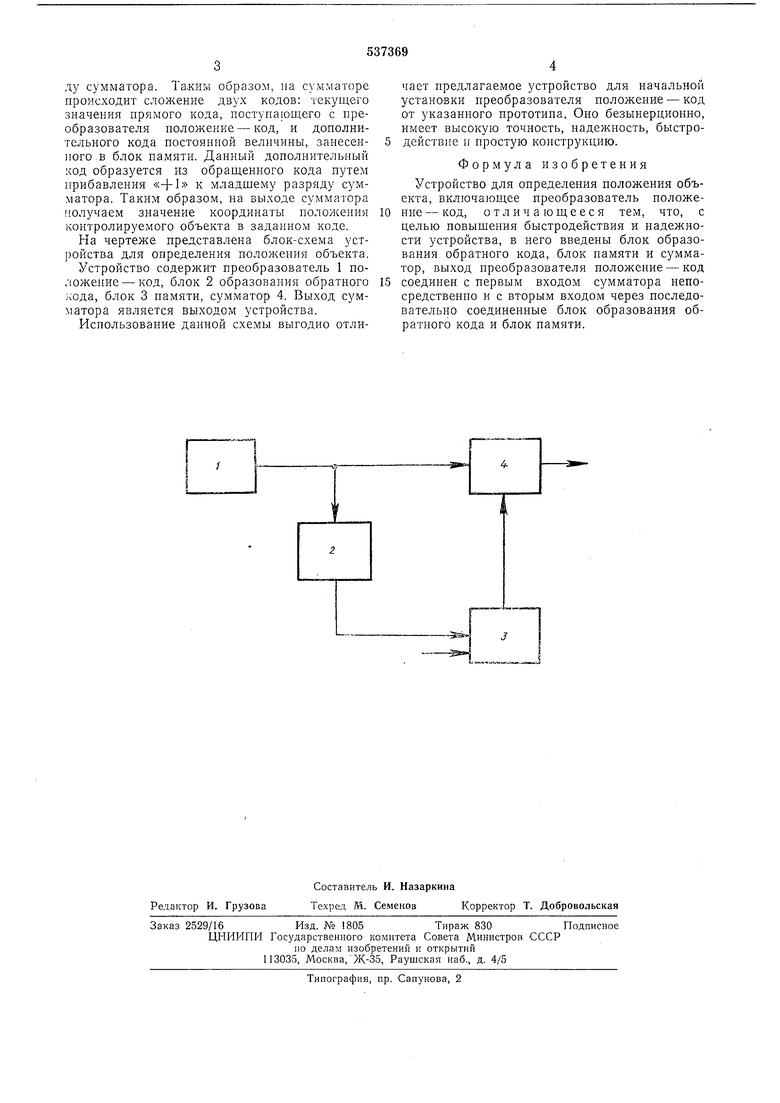
На чертеже представлена блок-схема устройства для определения положения объекта.
Устройство содержит преобразователь 1 положение- код, блок 2 образования обратного кода, блок 3 памяти, сумматор 4. Выход сумматора является выходом устройства.
Использовапие данной схемы выгодно отличает нредлагаемое устройство для начальной установки преобразователя положение - код от указанного прототипа, Оно безынерционно, имеет высокую точность, надежность, быстродействие и простую конструкцию.
Формула изобретения
Устройство для определения положения объекта, включающее преобразователь ноложение-код, отличающееся тем, что, с целью повыщения быстродействия и надежности устройства, в него введены блок образования обратного кода, блок памяти и сумматор, выход преобразователя положение - код
соединен с первым входом сумматора непосредственно и с вторым входом через последовательно соединенные блок образования обратного кода и блок памяти.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ автоматической настройки контура регулирования тока якорной цепи тиристорного электропривода постоянного тока | 1984 |
|
SU1277333A1 |
| Устройство для моделированияэлЕКТРОННыХ CXEM | 1978 |
|
SU813440A1 |
| Устройство для отображения информации | 1984 |
|
SU1290399A1 |
| Устройство для адресного управления объектом | 1985 |
|
SU1272309A1 |
| Способ автоматической настройки контура регулирования тока якорной цепи тиристорного электропривода | 1989 |
|
SU1644345A1 |
| ЦИФРОВОЕ ОТСЧЕТНОЕ УСТРОЙСТВО | 1973 |
|
SU383051A1 |
| ЦИФРОВОЙ ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛЬНЫЙ С ВОЗДЕЙСТВИЕМ ПО ПРОИЗВОДНОЙ РЕГУЛЯТОР | 1970 |
|
SU259226A1 |
| СИГНАЛИЗАТОР ПРЕДЕЛЬНЫХ ЗНАЧЕНИЙ УГЛОВОЙ СКОРОСТИ | 1991 |
|
RU2012891C1 |
| Устройство для измерения вертикальных перемещений бурильного инструмента по углу поворота барабана лебедки | 1987 |
|
SU1456541A1 |
| УСТРОЙСТВО для СЖАТИЯ ВХОДНОЙ ИНФОРМАЦИИ | 1972 |
|
SU324638A1 |
