Изобретение относится к электротехнике и может быть использовано в устройствах автоматического регулирования быстродействующих вентильных электроприводов различного назначения,
Целью изобретения является повышение точности настройки.
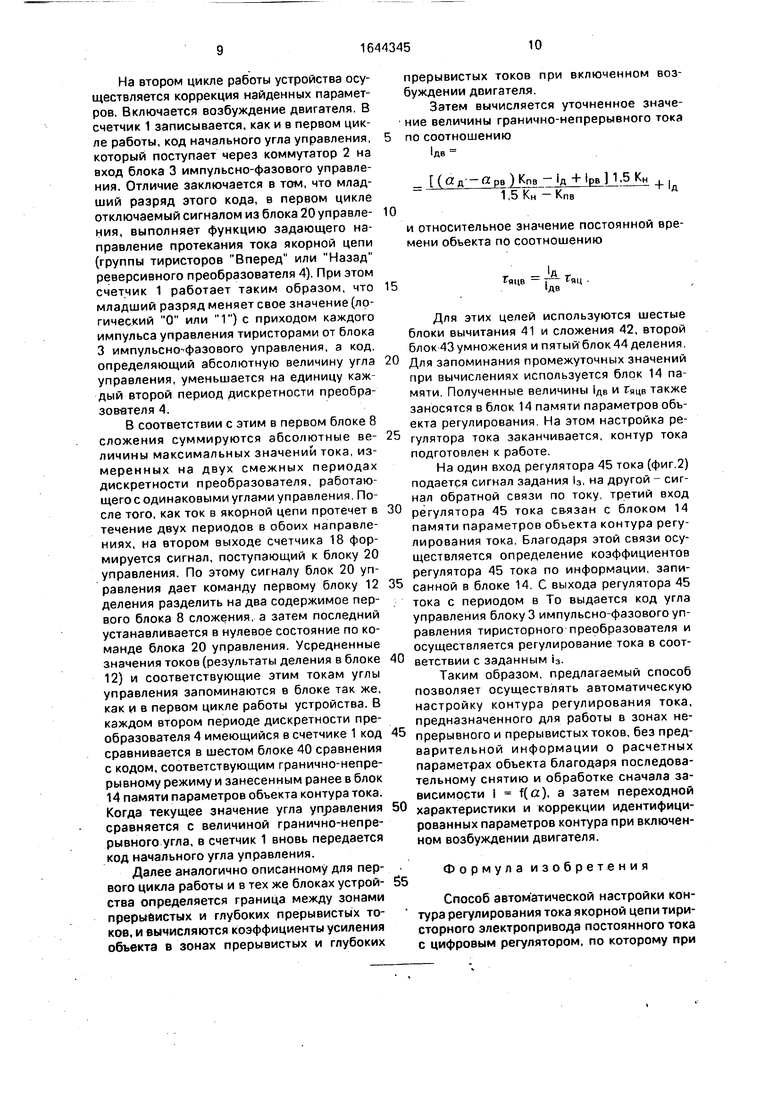
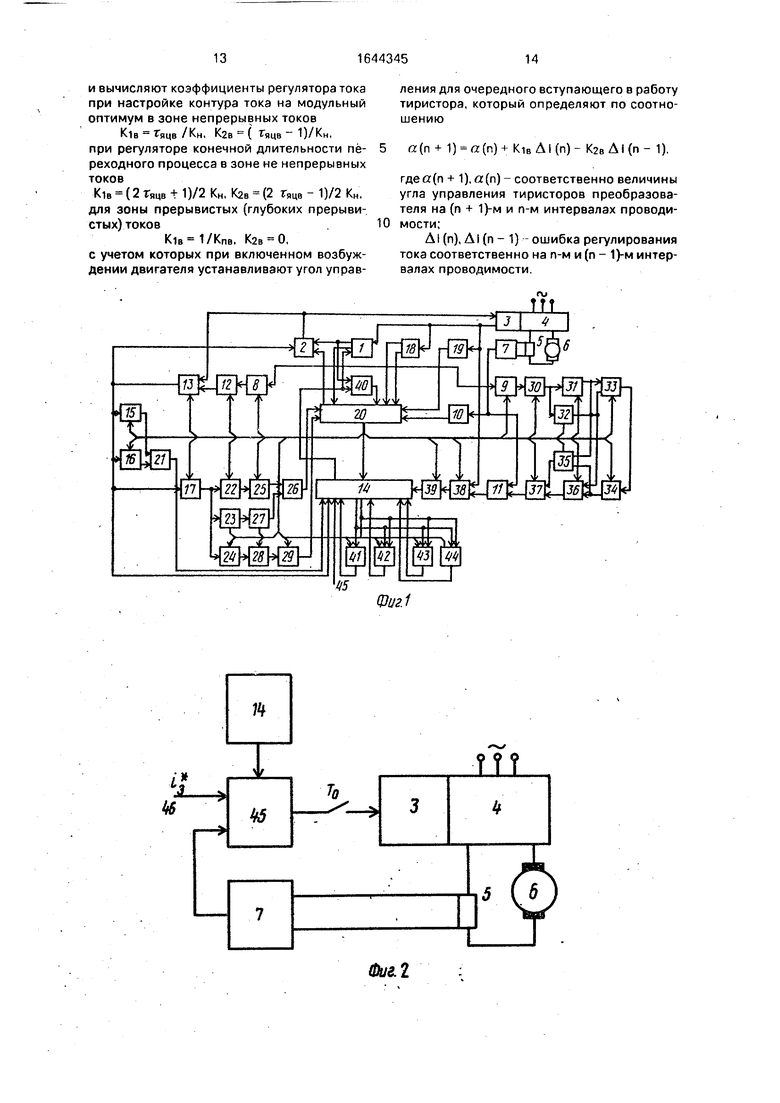
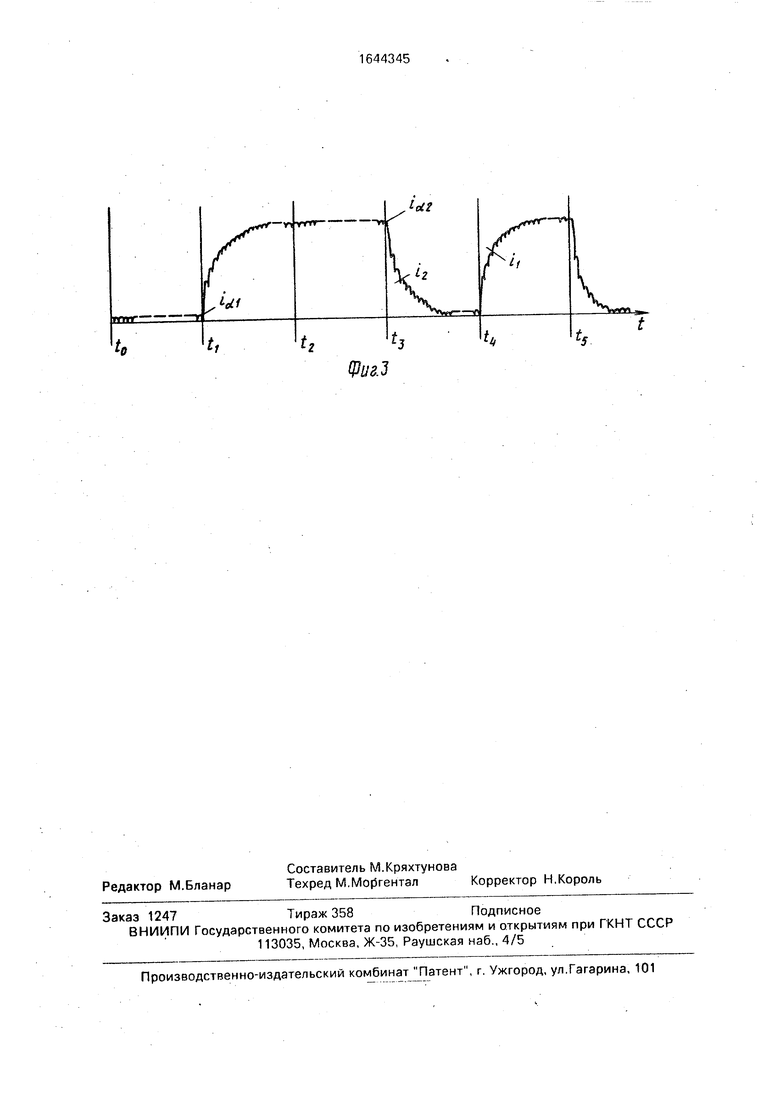
На фиг.1 представлена схема устройства для настройки контура регулирования тока; на фиг.2 - схема контура регулирования тока; на фиг.З - диаграмма, поясняющая работу устройства.
Устройство содержит(фиг.1) вычитающий счетчик 1, выход которого соединен через первый коммутатор 2 с входом цифрового блока 3 импульсно-фазового управления, соединенного с реверсивным трехфазным мостовым тиристорным преобразователем 4. К выходу тиристорного преобразователя 4 подключены последовательно соединенные токовый шунт 5 и якорь двигателя 6. Параллельно токовому шунту 5 включен цифровой датчик 7 максимального тока, выход которого связан с входами первого 8 и второго 9 блоков сложения, а также с входао J
ы .N ел
ми первого 10 и второго 11 блоков сравнения. К. выходу первого блока 8 сложения подключен первый блок 12 деления, выход которого связан с первым входом первого блока 13 памяти. Выход первого блока 13 памяти подключен к входу коммутатора 2, первому входу блока 14 памяти параметров объекта контура тока, к входам первого 15, второго 16 и третьего 17 блоков вычитания.
Выход первого коммутатора 2 соединен с вторым входом первого блока 13 памяти и входом цифрового блока 3 импульсно-фазо- вого управления, выход последнего подключен к входам вычитающего счетчика 1 и счетчиков 18 и 19. Выходы счетчиков 1, 18 и 19 связаны с входами блока 20 управления. Выходы блоков 15 и 16 вычитания соединены с входами второго блока 21 деления, выход которого связан с вторым входом блока 14 памяти параметров объекта контура регулирования тока. Выход третьего блока 17 вычитания связан с входами блока 22 сложения, второго блока 23 памяти и с входом третьего блока 24 сравнения. Выход третьего блока 22 сложения соединен через третий блок 25 деления с первым входом четвертого блока 26 сравнения, а выход второго блока 23 памяти через первый блок 27 сдвига двоичного кода числа соединен с вторым входом блока 26 сравнения, Выход третьего блока 24 сравнения через четвертый блок 28 сложения соединен с входом пятого блока 29 сравнения, выход последнего подключен к блоку 20 управления.
Второй блок 9 сложения через четвертый блок 30 деления связан с входами первого 31 и второго 32 буферных регистров, выходы которых соединены с входами четвертого блока 33 вычитания. Выход последнего подключен через блок 34 умножения к первым входам пятого блока 35 сложения и пятого блока 36 вычитания. Второй вход блока 35 сложения соединен с выходом буферного регистра 31, а второй вход блока 36 вычитания - с выходом буферного регистра 32. Выходы блоков 35 и 36 связаны через второй коммутатор 37 с входами второго блока 11 сравнения. Выход последнего соединен с управляющим входом третьего счетчика 38. Счетный вход счетчика 38 соединен с выходом цифрового блока 3 импуль- сно-фазового управления, а выход через второй блок 39 сдвига двоичного кода числа - с третьим входом блока 14 памяти параметров контура регулирования тока.
Первый выход блока 14 памяти параметров объекта контура тока соединен с первым входом шестого блока 40 сравнения, второй вход которого присоединен к выходу вычитающего счетчика 1, а выход
связан с одним из.входов блока 20 управления. Первые и вторые входы шестых блоков вычитания 41 и сложения 42, второго блока 43 умножения и пятого блока 44 деления
соединены с вторым и третьим выходами блока 14 памяти. Выходы блоков 41 - 44 соединены с четвертым, пятым, шестым и седьмым входами блока 14 памяти. Четвертый выход блока памяти параметров объек0 та контура регулирования тока связан с регулятором 45 тока. Входы последнего (фиг.2) связаны с блоком 46 задания и датчиком 7 тока.
Выходы блока 20 управления соедине5 ны с входами управления счетчиков 1 и 38, блоков 8, 9, 22, 28, 35 и 42 сложения, блоков 12, 21, 25, 30 и 44 деления, блоков 13, 14 и 23 памяти, коммутаторов 2 и 37, блоков 24, 29 и 40 сравнения, блоков 27 и 39 сдвига,
0 буферных регистров 31 и 32, блоков 15, 16, 17, 33, 36 и 41 вычитания, блоков 34 и 43 умножения.
Устройство работает следующим образом.
5 Работу устройства можно разделить на два цикла.
Первый проходит при отключенном возбуждении двигателя, второй - при включенном возбуждении.
0 В начале первого цикла в счетчике 1 записан код начального угла управления, который через коммутатор 2 поступает в цифровой блок 3 импульсно-фазового управления и определяет угол управления ти5 ристорного преобразователя 4 примерно в 120 эл.град. Предварительно отключается возбуждение двигателя. По сигналу блока 20 управления начинает работать счетчик 1, уменьшая код угла на одну дискрету по
0 сигналу от блока 3 импульсно-фазового управления, формируемым одновременно с импульсом открытия очередного тиристора тиристорного преобразователя 4. Максимальное значение тока на интервале проводимости
5 очередного тиристора воспринимается цифровым датчиком 7 и передается к первому блоку 10 сравнения, в котором сравнивается с максимально допустимым значением тока. Если величина измеренного тока мень0 ше максимально допустимого, то она поступает на вход первого блока 8 сложения. После того, как поступят импульсы управления на очередные шесть тиристоров, на выходе счетчика 18 формируется сигнал, по5 ступающий к блоку 20 управления. По этому сигналу блок 20 управления дает команду первому блоку 12 деления разделить на шесть содержимое первого блока сложения, в котором накоплена сумма шести поступивших подряд значений тока, а затем блок
8 сложения устанавливается в нулевое состояние по команде блока 20 управления.
Результат с выхода первого блока 12 деления поступает к первому входу блока 13 памяти для запоминания. К второму вхо- ду блока 13 памяти поступает код угла управления, соответствующий данному усредненному току. Значения кода угла управления записываются в блоке 13 памяти с шагом в шесть дискрет. Когда величина на выходе датчика 7 максимального тока становится равной или превышает максимально допустимое значение, на выходе первого блока 10 сравнения вырабатывается сигнал, поступающий к блоку 20 управления. По этому сигналу прекращается изменение угла управления и устанавливается в счетчике 1 код начального угла управления. Затем по сигналу блока 20 управления в третьем блоке 17 вычитания образуются первые обрат- ные разности величин токов, начиная с последней ячейки массива, записанного в блоке 13 памяти (с тока lr). Эти первые обратные разности суммируются в третьем блоке 22 сложения и запоминаются во вто- ром блоке 23 памяти. В третьем блоке 25 деления определяется среднее арифметическое значение обратных разностей на данный шаг вычислений путем деления их суммы на количество тактов, прошедших с начала обработки массива токов, записанных в блоке 13 памяти, т.е. определяется выражение
4 I Ar-S + 1
Ь5 1
где S - текущий номер интервала проводимости тиристора, отсчитываемый от интервала с номером (г + 1);
г - номер интервала проводимости тиристора, на котором зафиксировано наибольшее значение тока, а в блоке 27 сдвига двоичного кода числа происходит сдвиг влево поступивших из блока 23 значений первых разностей, что эквивалентно их удвоению и соответствует 2Ar-S.
Если величина на выходе блока 27 становится меньше, чем на выходе блока 25, то на выходе блока 26 сравнения образуется сигнал, поступающий к блоку 20 управления, свидетельствующий о том, что установлена величина граничного тока д между непрерывным и прерывистым током. При этом блок 20 управляет записью величины найденного граничного тока из блока 13 памяти в блоке 14 памяти параметров объекта контура регулирования тока. Одновременно в первом блоке 15 вычитания по информации от блока 13 памяти о величинах токов г и д образуется их разность, а в блоке 16 вычитания по информации о соответствующих этим токам углах управления а г и ад образуется их разность аг - ад. Затем во втором блоке 21 деления вычисляется коэффициент усиления объекта для зоны непрерывных токов по соотношению
Ir- i
и поступает для запоминания в блоке 14 памяти параметров объекта контура регулирования тока.
После определения границы зоны непрерывных токов и граничного тока д блок 20 управления включает в работу третий блок 24 сравнения, который воспринимает поочередно поступающие на его информационный вход первые обратные разности от блока 14 и выдает на своем выходе +1 - для положительных разностей, -1 - для отрицательных разностей и 0 - для нулевого значения разности. Эти сигналы поступают на вход четвертого блока 28 сложения, в котором вычисляются суммы шести очередных слагаемых. Результат суммирования поступает к пятому блоку 29 сравнения, в котором он сравнивается с числом три в соответствии с соотношением
I
v 1.
где V 1,2,3, 4, 5, и 6, по нарушению которого фиксируют границу между зонами прерывистых и глубоких прерывистых токов. Когда сумма станет меньше трех, пятый блок 29 сравнения выдает сигнал блоку 20 управления о том, что достигнута граница между зонами прерывистых и глубоких прерывистых токов (с током Ip). По команде от блока 20 управления происходит запись величины тока ip из блока 13 памяти в блок 14 памяти параметров объекта контура регулирования тока. Далее происходит вычисление коэффициентов усиления объекта для зон прерывистых Кп и глубоких прерывистых токов Km в соответствии с соотношениями
к - . Nn 7 -п л «Р
I/Ip IQ .
гп - „ , Up - и о
по величинам токов д ip, 0 и углов ад, о. р, «о аналогично ранее вычисленному коэффициенту обьекта для зоны непрерывистых токов. При этом используются первый 15 и второй 16 блоки вычитания и второй блок 21 деления. Результаты вычислений записываются в блоке 14 памяти параметров объекта контура регулирования тока.
После определения границ зон и коэффициентов усиления на них переходят к снятию и обработке переходной характеристики для определения постоянной времени тйц. Переходную характеристику снимают в пределах зоны непрерывных токов, найденной при обработке массива запомненных токов, при скачкообразном изменении угла управления, соответствующего как увеличению тока, так и его уменьшению, записывают значения токов для ряда последовательно вступающих в работу тиристоров. Оценку величины постоянной времени обьекта контура регулирования по переходной характеристике сводят к фиксации момента достижения приращений тока 5/8 отустано- вившегося приращения. Число интервалов производимости тиристоров от начала переходной характеристики до достижения 5/8 от установившегося приращения принимают в качестве оценки постоянной времени гяц.
По сигналу блока 20 управления на вход блока 3 импульсно-фазового управления через первый коммутатор 2 из блока 13 памяти поступает код угла управления а - aR, соответствующий граничному режиму работу преобразователя 4. В якорной цепи устанавливается ток i а 1 U Блок 9 сложения накапливает сумму значений максимального на интервале проводимости тиристоров тока, получаемых от датчика 7, з счетчик 19 подсчитывает заданное число импульсов преобразователя, например 100.
При завершении подсчета ста импульсов (интервал t0 ti, фиг.З) по сигналам из блока 20 управления в четвертом блоке 30 деления на 100 находится усредненное за 100 интервалов значение а- которое запоминается в первом буферном регистре 31. Затем на вход блока 3 импульсно-фазового управления поступает код угла управления «2 , соответствующий максимально допустимому значению тока i «2 За время ti - ta, отсчитываемое счетчиком 19, и соответствующее 100 интервалам, ток достигает установившегося значения, а за время t2 - t3 в блоке 9 сложения происходит накапливание суммы значений максимального на интервале проводимости тиристоров тока.
Далее эта сумма в четвертом блоке 30 деления делится на 100 и запоминается во втором буферном регистре 32. С момента времени ta в четвертом блоке 33 вычитания
находится разность i аг - а. в блоке 34 умножения эта разность умножается на 5/8. В пятом блоке 35 сложения результат умножения складывается с величиной тока, находящейся в первом буферном регистре 31, а
в пятом блоке 36 вычитания находится разность находящейся в регистре 32 величины тока i CJ2 и результата умножения в блоке 34.
В результате на выходе блока 35 вычисляет- ся величина тока И в соответствии с выражением
5 г1
и ai +з «2 - ai J а на выходе блока 36 - величина тока г в соответствии с выражением
12
«2
5 п
8 I1
a 2 а 1
Далее на вход блока 3 импульсно-фазового управления, через коммутатор 2 вновь поступает код а . При этом в блоке
11 происходит сравнение измеряемого датчиком 7 тока с находящимся в блоке 36 и поступающим на вход блока 11 через коммутатор 37 током i2, а в счетчике 38 подсчитывается количество пульсов тяц|
преобразователя, прошедших до момента превышения SOKOM i текущего значения, поступающего от датчика 7. В момент времени t4 на вход блока 3 через коммутатор 2 поступает код угла a 2 . Ток начинает расти,
з в блоке 11 происходит сравнение тока, измеренного датчиком 7, с током и, поступающим через коммутатор 37 и находящимся в блоке 35. Счетчик 38 продолжает подсчитывать количество пульсов преобразователя, прошедших до момента превышения током якорной цепи значения и - гяц. В момент времени ts в блок 3 импульсно-фазового управления поступает через коммутатор 2 начальное значение угла управления
«о, а в блоке 39 вычисления происходит усреднение значения постоянной времени якорной цепи путем сдвига вправо двоичного кода числа, накопленного в третьем счетчике 36, что равносильно делению на два в
соответствии с выражением тяц(гяц + + тяц{ )/2 . Значение усредненной постоянной времени тяц заносится в блок 14 памяти параметров объекта контура регулирования тока.
На втором цикле работы устройства осуществляется коррекция найденных параметров. Включается возбуждение двигателя. В счетчик 1 записывается, как и в первом цикле работы, код начального угла управления, который поступает через коммутатор 2 на вход блока 3 импульсно-фазового управления. Отличие заключается в том, что младший разряд этого кода, в первом цикле отключаемый сигналом из блока 20 управления, выполняет функцию задающего направление протекания тока якорной цепи (группы тиристоров Вперед или Назад реверсивного преобразователя 4). При этом счетчик 1 работает таким образом, что младший разряд меняет свое значение(ло- гический О или 1) с приходом каждого импульса управления тиристорами от блока 3 импульсно-фазового управления, а код, определяющий абсолютную величину угла управления, уменьшается на единицу каждый второй период дискретности преобразователя 4.
В соответствии с этим в первом блоке 8 сложения суммируются абсолютные величины максимальных значении тока, измеренных на двух смежных периодах дискретности преобразователя, работающего с одинаковыми углами управления. После того, как ток в якорной цепи протечет в течение двух периодов в обоих направлениях, на втором выходе счетчика 18 формируется сигнал, поступающий к блоку 20 управления. По этому сигналу блок 20 управления дает команду первому блоку 12 деления разделить на два содержимое первого блока 8 сложения, а затем последний устанавливается в нулевое состояние по команде блока 20 управления. Усредненные значения токов (результаты деления в блоке 12) и соответствующие этим токам углы управления запоминаются в блоке так же, как и в первом цикле работы устройства. В каждом втором периоде дискретности преобразователя 4 имеющийся в счетчике 1 код сравнивается в шестом блоке 40 сравнения с кодом, соответствующим гранично-непрерывному режиму и занесенным ранее в блок 14 памяти параметров объекта контура тока. Когда текущее значение угла управления сравняется с величиной гранично-непрерывного угла, в счетчик 1 вновь передается код начального угла управления.
Далее аналогично описанному для первого цикла работы и в тех же блоках устройства определяется граница между зонами прерывистых и глубоких прерывистых токов, и вычисляются коэффициенты усиления объекта в зонах прерывистых и глубоких
прерывистых токов при включенном возбуждении двигателя.
Затем вычисляется уточненное значе- ние величины гранично-непрерывного тока по соотношению
|ДВ
10
(ад--арв)Кпв -1Д + 1Рв 1.5 Кн 1,5 Кн - Кпв
+ I/
и относительное значение постоянной времени объекта по соотношению
5
0
5
0
5
0
5
0
5
г - AT
яцв - т Ьяц
ДВ
Для этих целей используются шестые блоки вычитания 41 и сложения 42, второй блок 43 умножения и пятый блок 44 деления. Для запоминания промежуточных значений при вычислениях используется блок 14 памяти. Полученные величины дв и гЯцв также заносятся в блок 14 памяти параметров объекта регулирования. На этом настройка регулятора тока заканчивается, контур тока подготовлен к работе.
На один вход регулятора 45 тока (фиг.2) подается сигнал задания 3, на другой - сигнал обратной связи по току, третий вход регулятора 45 тока св-язан с блоком 14 памяти параметров объекта контура регулирования тока. Благодаря этой связи осуществляется определение коэффициентов регулятора 45 тока по информации, записанной в блоке 14. С выхода регулятора 45 тока с периодом в То выдается код угла управления блоку 3 импульсно-фазового управления тиристорного преобразователя и осуществляется регулирование тока в соответствии с заданным i3.
Таким образом, предлагаемый способ позволяет осуществлять автоматическую настройку контура регулирования тока, предназначенного для работы в зонах непрерывного и прерывистых токов, без предварительной информации о расчетных параметрах объекта благодаря последовательному снятию и обработке сначала зависимости i f(a), а затем переходной характеристики и коррекции идентифицированных параметров контура при включенном возбуждении двигателя.
Формула изобретения
Способ автоматической настройки контура регулирования тока якорной цепи тиристорного электропривода постоянного тока с цифровым регулятором, по которому при
отключенном возбуждении двигателя задают максимально допустимое значение тока якоря, устанавливают начальный угол управления тиристорами преобразователя соответствующим режиму глубоких прерывистых токов, задают ступенчатые приращения угла управления, измеряют значения тока на каждом интервале проводимости тиристора, запоминают эти значения, прекращают изменение угла управления при достижении текущим значением тока заданного максимально допустимого значения тока, вычисляют первые обратные разности указанных токов, начиная с наибольшей его величины, и определяют границы между зонами непрерывных, прерывистых и глубоких прерывистых токов по нарушению неравенств
для границы между зонами непрерывных и прерывистых токов
Av-s + 1 2 Av-s,
Й5 1
для границы между зонами прерывистых и глубоких прерывистых токов
для зоны прерывистых (глубоких прерывистых) токов
Ki 1/Кп. К2 0, отличающийся тем, что, с целью
повышения точности настройки, устанавливают начальный угол управления тиристорами преобразователя соответствующим режиму глубоких прерывистых токов, включают возбуждение двигателя, задают ступенчатые
приращения угла управления, причем на каждом следующем интервале проводимости изменяют направление протекания тока якорной цепи, модуль тока измеряют и запоминают, прекращают изменение угла
управления на границе между зонами прерывистых и непрерывных токов, найденной при отключенном возбуждении двигателя, определяют границу между зонами прерывистых и глубоких прерывистых токов, вычисляют коэффициенты усиления объекта в зонах прерывистых и глубоких прерывистых токов при включенном возбуждений двигателя и находят уточнение величины гранично-непрерывного тока и относительного
значения постоянной времени объекта по соотношениям
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ автоматической настройки контура регулирования тока якорной цепи тиристорного электропривода постоянного тока | 1984 |
|
SU1277333A1 |
| Устройство для регулирования скорости электродвигателя | 1980 |
|
SU964936A1 |
| Способ регулирования скорости электродвигателя постоянного тока | 1986 |
|
SU1399881A1 |
| Устройство для автоматического переключения однофазных нагрузок в низковольтных распределительных сетях | 1981 |
|
SU1026234A1 |
| Способ управления вентильным преобразователем | 1985 |
|
SU1319200A1 |
| Способ управления полностью управляемым вентильным преобразователем | 1983 |
|
SU1173503A1 |
| Адаптивный регулятор тока для управляемых вентильных преобразователей | 1990 |
|
SU1786627A1 |
| УСТРОЙСТВО ДЛЯ АНАЛИЗА ОБЪЕКТОВ ПО ОПТИЧЕСКОМУ ИЗОБРАЖЕНИЮ | 1971 |
|
SU294145A1 |
| Способ управления вентильным преобразователем | 1990 |
|
SU1739457A1 |
| Устройство для цифрового управления @ -фазным широтно-импульсным преобразователем | 1983 |
|
SU1138902A1 |
Изобретение относится к электротехнике и может быть использовано для управления электродвигателями постоянного тока. Целью изобретения является повышение точности настройки. Согласно способу после автоматического определения статических и динамических параметров обьекта и величины гранично-непрерывного тока при отключенном возбуждении двигателя, включают возбуждение двигателя и снимают ста5 тическую характеристику, для чего задают ступенчатые приращения угла управления, измеряют и запоминают абсолютное значение тока, направление которого на каждом следующем интервале проводимости изменяют на противоположное, прекращают изменение угла управления при достижении им границы между зонами прерывистых и непрерывных токов, найденной при отключенном возбуждении двигателя. Определяя коэффициенты усиления объекта в зоне прерывистых токов при включенном возбуждении, находят уточненные величины гранично-непрерывного тока и относительного значения постоянной времени обьекта и по ним вычисляют коэффициенты регулятора тока для зон непрерывного и прерывистого тока, позволяющие для очередного интервала проводимости рассчитывать угол управления по разности заданного и измеренного тока но текущем и предыдущем интервалах. 3 ил. со С
,
v 1
где А- первая обратная разность токов;
V - номер интервала проводимости тиристора, на котором зафиксировано наибольшее значение тока;
S - текущий номер интервала проводимости тиристора, отсчитываемый от интервала с номером V + 1;
A v при V 1, 2,..., 6 - первые обратные разности токов, соответствующие шести последовательным интервалам проводимости;
вычисляют коэффициенты усиления объекта контура регулирования в пределах каждой зоны, затем снимают переходную характеристику объекта, формируя ступенчато увеличивающееся и ступенчато уменьшающееся задание на входе объекта в пределах зоны непрерывных токов, определяют значение постоянной времени объекта путем усреднения величины при росте и спадании тока и вычисляют коэффициенты регулятора тока при настройке контура тока на модульный оптимум в зоне непрерывных токов
К1 Гяц/К„, К2( Тяц-1)/Кн,
при регуляторе конечной длительности переходного процесса в зоне непрерывных токов Ki - ( 2 гяц + 1)/2 Кн. К2 (2 гяц - 1)/2 Кн,
ДВ
-Нд,
35
г « т яцв - 1- яц
где 1Д, 1дв - величины гранично-непрерывного тока при отключенном и включенном возбуждении двигателя;
тяц Тяц/То, гяцв Тяцв/То - соответственно отношения постоянных времени якорной цепи при отключенном ТЯц и включенном Тяцв возбуждении двигателя и интервала проводимости преобразователя То;
«д - угол управления тиристорного
преобразователя, соответствующий при отключенном возбуждении двигателя гранично-непрерывному току 1д;
1рв - величина граничного тока между зонами прерывистых и глубоких прерывистых токов при включенном возбуждении двигателя;
а Рв - угол управления тиристорного преобразователя, соответствующий току Ipe; Кн - коэффициент усиления объекта в зоне непрерывных токов;
Кп, Кпв - коэффициенты усиления объекта в зоне прерывистых токов при отключен ном и включенном возбуждении двигателя;
и вычисляют коэффициенты регулятора тока при настройке контура тока на модульный оптимум в зоне непрерывных токов
К1в Гяцв /Кн, К2в ( ГЯцв - 1)/Кн, при регуляторе конечной длительности переходного процесса в зоне не непрерывных токов
К1в ( 2 Гяцв + 1)/2 Кн, К2в (2 Гяцв - 1)/2 Кн,
для зоны прерывистых (глубоких прерывистых) токов
К1в 1/Кпв, К2в 0,
с учетом которых при включенном возбуждении двигателя устанавливают угол управ/
45
М
То
ления для очередного вступающего в работу тиристора, который определяют по соотношению
a(n + 1) a(n)-i KiB Al(n)- Ai(n- 1).
где а(п + 1), а (п) - соответственно величины угла управления тиристоров преобразователя на (п + 1)-м и n-м интервалах проводи- мости;
Д| (п), АI (п - 1) - ошибка регулирования тока соответственно на n-м и (п - 1)-м интервалах проводимости
111
5 ( 6
Фиг. 2
00 J
| Способ автоматической настройки контура регулирования тока якорной цепи тиристорного электропривода постоянного тока | 1984 |
|
SU1277333A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
