ю ю
со
Изобретение относится к регулирующим и управляющим системам общего назначения, в частности к устройствам адресного управления подвижными объектами, и может быть использовано для управления кранами - штабелерами, лифтами, транспортными роботами и другими подвижными объектами -с определенным количеством пунктов адресования.
Цель изобретения - повышение точности устройства путем устранения погрешности формирования кода на входе цифроаналогового преобразователя.
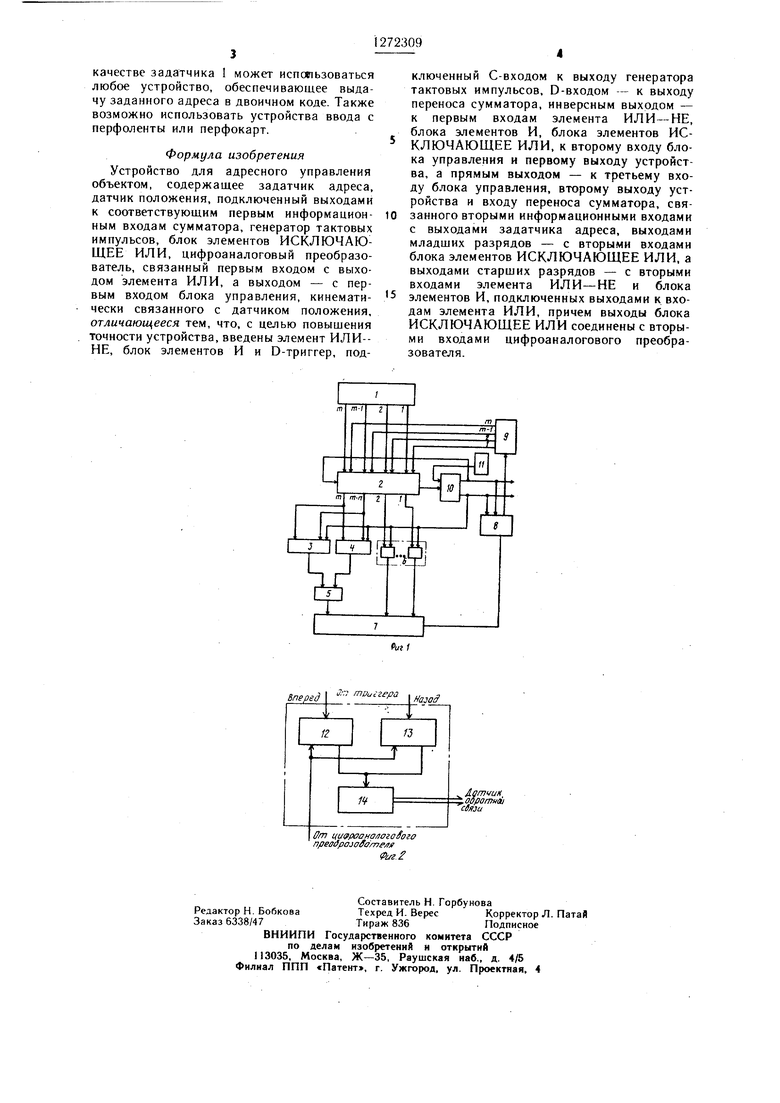
На фиг. 1 представлена блок-схема устройства; на фиг. 2 - схема блока управления.
Устройство содержит задатчик 1 адреса, сумматор 2, элемент ИЛИ-НЕ 3, блок 4 элементов И, элемент ИЛИ 5, блок 6 элементов ИСКЛЮЧАЮЩЕЕ ИЛИ, цифроаналоговый преобразователь 7, блок 8 управления, датчик 9 положения, D-триггер 10, генератор II импульсов. Блок 8 управления (фиг. 2) содержит блок 12 реверса «Вперед, блок 13 реверса «Назад, двигатель 14.
В устройстве для осуществления плавного торможения производится непрерывное определение разности между кодами текущего и заданного адреса.
Устройство работает следующим образом.
При работе возможны два случая: если заданный адрес меньше текущего адреса, т.е. в сумматоре 2 происходит сложение большего кода с проинвертированным меньшим, при этом сигнал с выхода переноса сумматора на вход триггера 10 не возникает и триггер устанавливается в нулевое состояние, что соответствует движению «Назад, если заданный адрес больше текущего, в сумматоре 2 происходит сложение меньшего кода адреса с проинвертированным большим, при этом возникает сигнал с выхода переноса сумматора на вход триггера 10, который его перекрывает в единичное состояние, что соответствует движению «Вперед, т.е. происходит смена сигнала направления движения. Меняются на противоположные и сигналы, поступающие с выходов триггера 10 на вход переноса сумматора 2 и на элемент ИЛИ-НЕ 3 и блоки 4 и 6.
После смены сигналов блок 6 элементов ИСКЛЮЧАЮЩЕЕ ИЛИ, который работал как инвертор, работает кай повторитель. Направление движения запомнилось в триггере 10 до новой смены адреса. В начальный момент времени состояние триггера 10 может быть любым.
Например, пусть текущий адрес, где находится устройство, соответствует 10 (в двоичном коде 1010), вновь заданный адрес 4 (в двоичном коде 0100). Проинвертированный заданный адрес (1011) суммируется в сумматоре 2 с текущим
1010
+ 1011
1 0101 ОНО
Полученный при этом сигнал переноса на выходе сумматора 2 поступает на триггер 10 и устанавливает его в единичное состояние, что приводит к подаче сигнала на вход переноса сумматора 2. В этом случае по.пучают абсолютное значение разности (равное шести).
Пусть теперь заданный адрес равен 12, а текущий равен 10. В сумматоре 2 проинвертированный заданный адрес (0011) суммируется с текущим .1010 . ООН
-1101
о 0010
При этом сигнал переноса равен нулю. Сигнал генератора 11 переключает триггер 10 в противоположное состояние, что соответствует изменению направления дви5 жения.
Код с выходов сумматора 2 инвертируется блоком 6 элементов ИСКЛЮЧАЮЩЕЕ ИЛИ и получается истинное значение разности, равное двум. По мере движения объекта код на выходе преобразователя уменьшается, уменьшая сигнал на его выходе, т.е. снижается скорость движения подвижного объекта до полной остановки его при достижении заданного адреса. Элемент ИЛИ-НЕ 3 обеспечивает выделение рабочей зоны цифроаналогового пре образователя 7 при положительных значениях кода разности текущего и заданного кодов, а блок 4 - при отрицательных. Элемент И 4 объединяет эти сигналы и формирует полную рабочую зону преобразова0
Блок 8 управления (фиг. 2) преобразует напряжение, подаваемое от преобразователя 7, во вращающий момент электродвигателя 14. Причем сигнал с прямого выхода триггера 10 направления включает
5 блок 12 реверса «Вперед, а с инверсного - блок 13 реверса «назад, которые формируют противоположное направление тока питания двигателя 14. При этом величина тока определяется величиной напряжения, поступающего с преобразователя 7.
Код с датчика 9 дискретно отображает положение подвижного объекта в текущий момент времени, которое меняется вследствие вращения двигателя 14 в блоке 8. Датчик 9 располагается так, что может 5. быть обеспечена его механическая связь с валом электродвигателя 14 или другим механизмом, преобразующим действительное значение координаты в двоичный код. В качестве задатчика 1 может использоваться любое устройство, обеспечивающее выдачу заданного адреса в двоичном коде. Также возможно использовать устройства ввода с перфоленты или перфокарт. Формула изобретения Устройство для адресного управления объектом, содержащее задатчик адреса, датчик положения, подключенный выходами к соответствующим первым информационным входам сумматора, генератор тактовых импульсов, блок элементов ИСКЛЮЧАЮЩЕЕ ИЛИ, цифроаналоговый преобразователь, связанный первым входом с выходом элемента ИЛИ, а выходом - с первым входом блока управления, кинематически связанного с датчиком положения, отличающееся тем, что, с целью повыщения точности устройства, введены элемент ИЛИ-НЕ, блок элементов И и D-триггер, подключенкый С-входом к выходу генератора тактовых импульсов, D-входом - к выходу переноса сумматора, инверсным выходом - к первым входам элемента ИЛИ-НЕ, блока элементов И, блока элементов ИСКЛЮЧАЮЩЕЕ ИЛИ, к второму входу блока управления и первому выходу устройства, а прямым выходом - к третьему входу блока управления, второму выходу устройства и входу переноса сумматора, связанного вторыми информационными входами с выходами задатчика адреса, выходами младщих разрядов - с вторыми входами блока элементов ИСКЛЮЧАЮЩЕЕ ИЛИ, а выходами старших разрядов - с вторыми входами элемента ИЛИ-НЕ и блока элементов И, подключенных выходами к входам элемента ИЛИ, причем выходы блока ИСКЛЮЧАЮЩЕЕ ИЛИ соединены с вторыми входами цифроаналогового преобразователя.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для адресного управления объектом | 1982 |
|
SU1109714A1 |
| Устройство для управления многоканальным вибростендом | 1980 |
|
SU924665A1 |
| Устройство для регулирования температуры | 1986 |
|
SU1403025A1 |
| Устройство для двухкоординатного управления рабочим органом | 1990 |
|
SU1815620A1 |
| Устройство для синусно-косинусного цифроаналогового преобразования | 1983 |
|
SU1278897A1 |
| Генератор векторов | 1988 |
|
SU1596375A2 |
| Синтезатор частот | 1984 |
|
SU1293841A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ОБЪЕМНОГО РАСХОДА ЖИДКОСТИ | 1991 |
|
RU2012848C1 |
| Устройство для регулирования расхода | 1986 |
|
SU1377832A1 |
| Система для программного управления правильной машиной | 1986 |
|
SU1327065A1 |
Изобретение относится к регулирующим и управляющим системам общего назначения и может найти применение в мащиностроении и других областях техники. Цель изобретения - повышение точности устройства за счет устранения погрешности формирования кода. Устройство содержит задатчик адреса, сумматор, элемент ИЛИ- НЕ, блок элементов И, элемент ИЛИ, блок элементов ИСКЛЮЧАЮЩЕЕ ИЛИ, цифроаналоговый преобразователь, блок управления, датчик перемещения, D-триггер, генератор импульсов. Введение элементов ИЛИ-НЕ, блок-элементов И, D-триггера, и соответствующих функциональных связей позволяет достичь поставленную цель. 2 ил.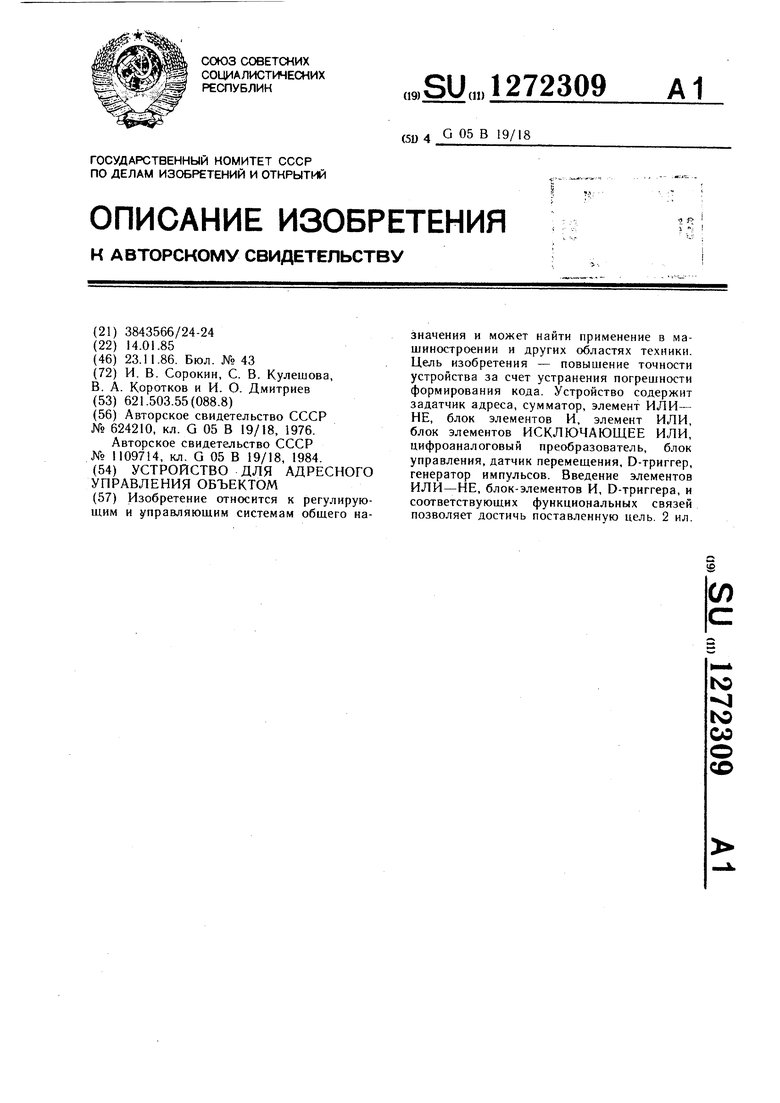
| Цифровая система программного управления | 1976 |
|
SU624210A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Устройство для адресного управления объектом | 1982 |
|
SU1109714A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
