1
Изобретение относится к системам автоматического управления и может бЫть использовано в устройствах для измерения линейных перемещений, скоростей и ускорений движущихся управляемых объектов.
В известных устройствах, содеря- дщих в качестве первичного датчика инерционное тело, чувствительный элемент связан с корпусом прибора при помощи механических связей 3.
Этого недостатка лишены устройства, в которых чувствительный элемент не имеет механических связей с корпусом прибора во время измерения 2.
Кроме того, известно устройство, содержащее освобождаемый на время .измерения чувствительный элемент (ЧЭ) и емкостные датчики его движения относительно корпуса, сигналы с которых поступают в схему обработки 1. Оно используется для парирования слабых медленно изменяющихся возмущений, действующ.их на объект в космосе, при этом используется стабилизация корпуса объекта относительно инерционной массы чувствительного элемента, сохраняющего параметры невозмущенного движения.
Недостатком известного устройства является ограниченный динамический диапазон измерения параметров линейного движения, полностью определяемый динамическими характеристиками системы регулирования положения корпуса объекта относительно ЧЭ, и, как следствие, низкая стойкость к действию значительных по уровню импульсных механическнх возмущений.
Цель изобретения - повышение помехоустойчивости и расщирение диапазона измерений параметров движения. Для этого предлагаемое устройство снабжено управляемой по внешним сигналам системой импульсного разгона чувствительного элемента .и схемами формирования импульсов задания измерительного интервала, выходы которых соединены с соответствующими управляющими входами схемы обработки сигналов с датчиков.
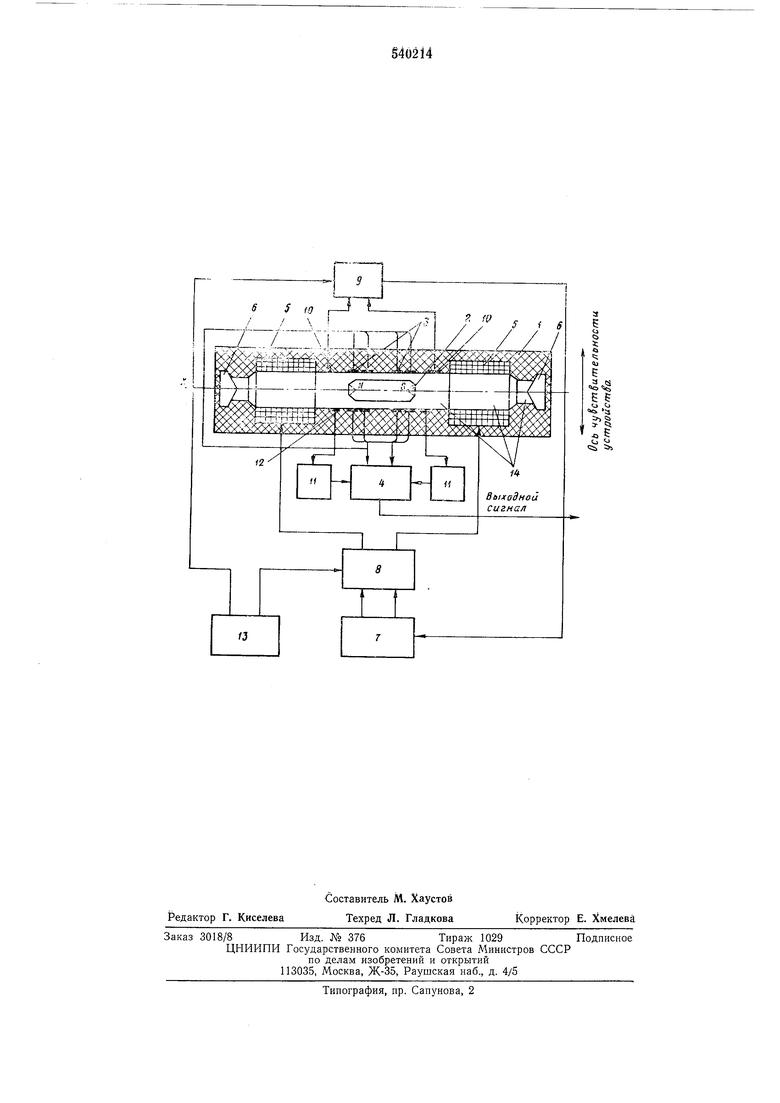
На чертеже представлена схема устройства для измерения параметров линейного движения с системой импульсной фиксации и разгона и двумя схемами формирования импульсов задания измерительного интервала с соответствующими емкостными датчиками продольного положения ЧЭ. Устройство содержит корпус 1, выполненный из немагнитных материалов, инерционный ЧЭ 2, выполненный в виде прямого постоянного магнита с центрирующими торцовыми поверхностями, емкостные датчики 3 перемещения ЧЭ вдоль оси чувствительности
устройства, схему 4 обработки сигналов от
датчиков, соленоиды 5, пружинные амортизаторы 6, генератор тока 7, .имеющий один управляющий и два рабочих выхода, электронный коммутатор 8, имеющий управляющий и два рабочих входа, два выхода, схему 9 формирования импульсов управления генератором тока, емкостные датчики 10 схемы формирования .импульсов управления, регистрирующие положения ЧЭ вдоль продольной оси X-X, схемы 11 формирования импульсов задания измерительных интервалов, емкостные датчики 12 схемы формирования импульсов задания измерительного интервала продольного положения ЧЭ, электронный синхронизатор 13; 14 - нолость корпуса устройства.
Устройство работает следующим образом, В исходном состоянии намагниченный инерционный ЧЭ притянут одним из соленоидов 5 и прижат к амортизатору 6. При этом ЧЭ в поперечных направлениях фиксируется стенками полости 14 корпуса устройства, чем обеспечивается высокая стойкость к действию поперечных нагрузок. В продольном нанравлении ЧЭ фиксируется силами взаимодействия его как ностоянного магнита с магнитным полем соленоида, вызванным протекающим по соленоиду током соответствующего направления.
По сигналу от синхронизатора 13 коммутатор 8 меняет направление токов, протекающнх от генератора тока в соответствующих соленоидах. В результате тот соленоид, который удерживал ЧЭ, начинает его выталкивать, а противоположный соленоид притягивать, чем обеспечивается разгон ЧЭ вдоль оси X-X. Это продолжается до тех пор, пока ЧЭ не приблизится к емкостным датчикам схемы формирования импульсов управления. Как только расстояние между торцом ЧЭ и ближайшим датчиком 10 становится достаточно малым, схема формирования импульсов вырабатывает сигнал на выключение генератора 7. Разгон ЧЭ прекращается и он продолжает свободное движение без ускорения. По прохождении ЧЭ ближайшего емкостного датчика 12 соответствующая схема формирования импульсов задания измерительного интервала открывает схему обработки сигналов 4. Если при этом на объект действуют силы, изменяющие параметры его движения, то на выходе схемы 4 появляется сигнал, позволяющий измерить изменения этих параметров известным образом.
Измерительный интервал заканчивается, как только ЧЭ достигнет очередного емкостного датчика 10, схема формирования импульсов управления вновь включает генератор 7, ЧЭ дополнительно ускоряется системой соленоидов, достигает второго амортизатора и прижимается к нему до тех, пор, пока синхронизатор 13 вновь не приведет в действие коммутатор 8.
Выбирая длительность интервалов импульсов фиксации разгона и измерительного интервала, можно обеспечить помехоустойчивость устройства. Интервалы разгона и свободного движения должны быть такими, чтобы за время движения ЧЭ от одного амортизатора к другому относительное смещение корпуса и ЧЭ было меньше зазора между ними в поперечном направлении.
Частотой синхронизатора можно управлять в соответствии с уровнем действующих на устройство возмущений.
Формула изобретения
Устройство для измерения нараметров линейного движения объекта, содержащее корпус, инерционный чувствительный элемент, неконтактные датчики перемещения чувствительного элемента относительно корпуса, схему обработки сигналов с датчиков и систему импульсной фиксации чувствительного элемента, отличающееся тем, что, с целью повышения помехоустойчивости и расширения диапазона измерений параметров движения, оно снабжено управляемой по внешним сиг-. налам системой импульсного разгона чувствительного элемента и схемами формирования импульсов задания измерительного интервала, выходы которых соединены с соответствующими управляющими входами схемы обработки сигналов с датчиков.
Источники информации, принятые во внимание нри экспертизе:
1.«Электроника США, № 17, 1973, с. 15-16 (прототип).
2.И. А. Горенштейн «Инерциальные навигационные устройства. Машиностроение, 1970, с. 99-130.
3.В. П. Селезнев «Навигационные устройства. Машиностроение, 1961, с. 444-446.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНЕРЦИАЛЬНОЕ ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО | 2003 |
|
RU2243569C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ЖЕЛЕЗНОДОРОЖНОГО ПОДВИЖНОГО СОСТАВА, ПОДВЕСА ЧУВСТВИТЕЛЬНОГО ЭЛЕМЕНТА ПОПЛАВКОВОГО МАЯТНИКОВОГО АКСЕЛЕРОМЕТРА И УСТРОЙСТВА ЕГО РЕАЛИЗУЮЩИЕ | 2005 |
|
RU2281874C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1989 |
|
RU2086934C1 |
| ШИРОКОДИАПАЗОННЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2008 |
|
RU2378618C2 |
| Способ определения ускорения | 1988 |
|
SU1597734A1 |
| Датчик угла наклона объекта в двух взаимно перпендикулярных плоскостях | 1985 |
|
SU1328672A1 |
| Тензометрический линейный акселерометр | 2024 |
|
RU2835899C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПЕРЕМЕННЫХ МАГНИТНЫХ ПОЛЕЙ | 2005 |
|
RU2295736C1 |
| ИЗВЕЩАТЕЛЬ В.И. ЯЦКОВА С ЁМКОСТНЫМ И ЛУЧЕВЫМ СРЕДСТВАМИ ОБНАРУЖЕНИЯ | 2017 |
|
RU2697617C2 |
| СПОСОБ АВТОМАТИЧЕСКОГО КОНТРОЛЯ СРАБАТЫВАНИЯ ДВУХОБМОТОЧНОГО ЭЛЕКТРОМАГНИТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1987 |
|
SU1840227A1 |