Предлагаемое изобретение относится с ракетной электротехнике и может быть преимущественно использовано для дистанционного автоматического контроля срабатывания электромагнита (ЭМ), работающего в тяжелых эксплуатационных условиях и обеспечивающего высокое быстродействие.
Известны способы автоматического контроля срабатывания электромагнита, основанные на измерении тока в его пусковой обмотке и определении по характеру его изменения момента срабатывания. Один из таких способов описан на с.100 (рис.5-1) в книге: Сливинская А.Г. Электромагниты и постоянные магниты, М.: Энергия, 1972. Процесс нарастания тока в пусковой обмотке (ПО) ЭМ носит экспотенциальный характер со специфическим участком временного уменьшения тока, связанного с возникновением противо-э.д.с., появляющейся при движении якоря. Момент срабатывания ЭМ определяется по окончанию временного уменьшения тока и началу его дальнейшего нарастания. Этот способ используется при проведении контрольно-выборочных испытаний электромагнитного клапана для контроля срабатывания ЭМ и определения динамических характеристик. При этом используются осциллограммы тока в обмотке ЭМ. Для измерения тока в обмотке ЭМ в качестве чувствительного элемента используется дополнительное последовательное сопротивление, устанавливаемое в цепь питания обмотки. Известен также способ измерения времени срабатывания ЭМ по авт. св. СССР №190486, 1964 г., в котором с целью упрощения сигнал с дополнительного сопротивления в цепи пусковой обмотки подается на дифференцирующий блок, а положительные фронты двух последующих импульсов, возникающих на выходе дифференцирующего блока, используют для отсчета времени срабатывания, например для запуска и отключения счетного устройства. Данный способ не позволяет надежно регистрировать момент срабатывания, так как при наличии "дребезга контактов" или в случае несинхронности работы электронных ключей, вызванной разбросом их технологических параметров, в L-C цепи, образованной индуктивностью обмотки и емкостью дифференцирующего блока, будет возникать колебательный переходной процесс в момент подачи напряжения на обмотку ЭМ. При этом на выходе дифференцирующего блока может появиться произвольное число импульсов, положительные фронты которых будут регистрироваться счетным устройством. Кроме того, в случае несрабатывания магнита, например из-за увеличения нагрузки или снижения напряжения питания, в момент снятия напряжения с обмотки возникают аналогичные переходные процессы, которые могут быть зарегистрированы счетным устройством как факт срабатывания.
Прототипом предлагаемого изобретения является реализованный в устройстве для управления ЭМ по авт. св. СССР №1094674, 1984 г. способ автоматического контроля срабатывания ЭМ, основанный на измерении скорости изменения тока в пусковой обмотке и формировании постоянного сигнала, свидетельствующего о срабатывании ЭМ, в момент второго изменения направления скорости изменения тока в ПО. Данный способ позволяет фиксировать момент срабатывания ЭМ с некоторой временной задержкой, уменьшение которой значительно снижает помехозащищенность. Надежность контроля срабатывания данным способом невелика, так как время наблюдения неограниченно, вследствие чего возрастает вероятность прохождения помехи. Скорость изменения тока в ПО здесь определяют по изменению напряжения на дополнительном сопротивлении, включенном последовательно в цепь ПО, что снижает надежность и повышает энергопотребление.
Целью предлагаемого изобретения является повышение точности и надежности. Для достижения этой цели в момент подачи напряжения на пусковую обмотку формируют временной интервал, равный 0,2÷0,5 минимального времени срабатывания, по окончании которого формируют измерительный интервал до момента гарантированного срабатывания электромагнита, на измерительном интервале сравнивают скорость изменения тока с заданной величиной и при достижении ею этой величины формируют постоянный сигнал, свидетельствующий о срабатывании ЭМ, при этом скорость изменения тока в ПО определяют по скорости изменения напряжения на удерживающей обмотке (УО).
Автоматический контроль срабатывания ЭМ осуществляют с помощью специальных датчиков, в качестве которых могут быть использованы концевые контактные выключатели (см. например, Сливинская А.Г. Электромагниты и постоянные магниты, М.: Энергия, 1972, с.232-234, рис.9-6 в) или другие датчики положения якоря (емкостные, индуктивные, фотодатчики), в конструкциях которых присутствуют подвижные механические элементы. При этом сами датчики или их преобразователи первичной информации приходится устанавливать в непосредственной близости от якоря ЭМ.
Здесь необходимо производить автоматический дистанционный контроль срабатывания ЭМ при проведении испытаний и регламентных проверок и непосредственно в полете для управления схемой включения самого ЭМ. Работа таких ЭМ происходит в условиях вибрации и повышенной температуры, которая может достигать 200°С. Эти ЭМ должны надежно отрабатывать входные сигналы с частотой до 30 Гц.
Прототипом датчика автоматического контроля срабатывания двухобмоточного ЭМ по п.2 формулы изобретения является датчик автоматического контроля срабатывания ЭМ, использованный в устройстве для управления ЭМ по авт. св. СССР №1094074, 1984 г. Этот датчик содержит последовательно соединенные чувствительный элемент (ЧЭ), которым является дополнительное последовательное сопротивление в цепи ПО, дифференциатор, схему сравнения и триггер, выход которого является выходом датчика. Примененный в этом устройстве дифференциатор реализован с использованием инерционного звена. Такое построение дифференциатора известно из специальной литературы (см. например, Алексеенко А.Г., Коломбет Е.А., Стародуб Г.И. Применение прецизионных аналоговых ИС, М.: Радио и связь, 1981, с.84, 85, табл.3.3 последняя схемная реализация). Дифференциатор совмещен в едином каскаде со схемой сравнения. Этот датчик реализует способ-прототип и поэтому обладает всеми его недостатками. Задержка в определении момента срабатывания таким датчиком определяется постоянной времени инерционного звена в схеме дифференциатора. Величина этой постоянной времени связана с временем движения якоря ЭМ, что не позволяет устранить задержку в определении момента срабатывания.
Цель предлагаемого изобретения по п.2 достигается тем, что в датчик введены формирователь измерительного интервала, элемент И и блок установки нуля, а в качестве ЧЭ использована удерживающая обмотка ЭМ, причем вход установки нуля триггера соединен с выходом блока установки нуля, а вход установки единицы - с выходом элемента И, входы которого соединены с выходом схемы сравнения и инверсным выходом формирователя измерительного интервала, вход которого соединен с пусковой обмоткой электромагнита, а прямой выход - с входом блока установки нуля.
Сущность предлагаемых технических решений поясняется чертежами:
Фиг.1. Функциональная схема датчика автоматического контроля срабатывания двухобмоточного электромагнита. Фиг.2. Электрическая принципиальная схема датчика. Фиг.3. Осциллограммы работы датчика.
Поясним предлагаемый способ автоматического контроля срабатывания ЭМ.
Для удовлетворения этих требовании можно использовать двухобмоточный магнит, в котором последовательно соединены ПО и УО. При работе такого ЭМ в начальный момент времени напряжение подается на ПО, а после срабатывания - сразу на две последовательно включенные обмотки. Такое техническое решение позволяет снизить вес ЭМ, так как отпадает необходимость в добавочном сопротивлении. Кроме того, появляется возможность значительно уменьшить сечение провода ПО (из-за ее работы в повторно-кратковременном режиме) и снизить энергопотребление ЭМ за счет уменьшения тока удержания. Для автоматического контроля срабатывания такого ЭМ измеряют скорость изменения напряжения на его УО. Характер изменения этой скорости полностью соответствует характеру изменения скорости тока в ПО, но имеет обратную полярность. В момент подачи напряжения на ПО формируют временной интервал, равный 0,2÷0,5 минимального времени срабатывания, по окончании которого формируют измерительный интервал до момента гарантированного срабатывания ЭМ. Временной интервал, равный 0,2÷0,5 минимального времени срабатывания, формируют для исключения из измерительного интервала отрезка времени, примыкающего к моменту включения ЭМ. Это позволяет исключить влияние на точность определения момента срабатывания помех, возникающих в момент подачи напряжения на ПО ЭМ. Этот интервал должен быть меньше времени срабатывания ЭМ при любых допустимых условиях эксплуатации. Уменьшение же этого интервала снижает помехозащищенность. Проведенный анализ показал целесообразность выбора величины этого интервала в пределах 0,2÷0,5 минимального времени срабатывания ЭМ. Измерительный интервал формируется по окончании описанного временного интервала до момента гарантированного срабатывания ЭМ (при любых допустимых условиях эксплуатации). Такой выбор измерительного интервала позволяет повысить надежность и практически исключить вероятность фиксирования ложного срабатывания. На измерительном интервале сравнивают скорость изменения напряжения на УО с заданной величиной (это позволяет исключить влияние помех малой амплитуды) и при достижении ею этой величины формируют постоянный сигнал, свидетельствующий о срабатывании ЭМ. Этот сигнал может быть использован для дистанционного контроля срабатывания ЭМ при проведении различных испытаний и регламентных проверок, а также управления схемой включения ЭМ.
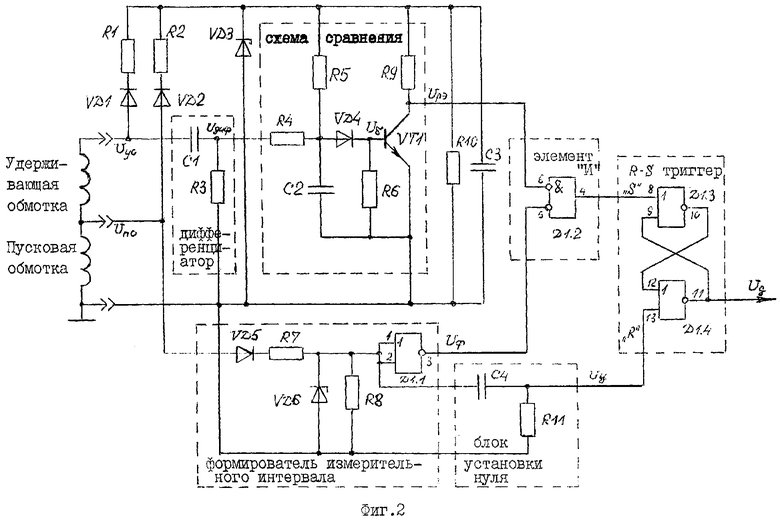
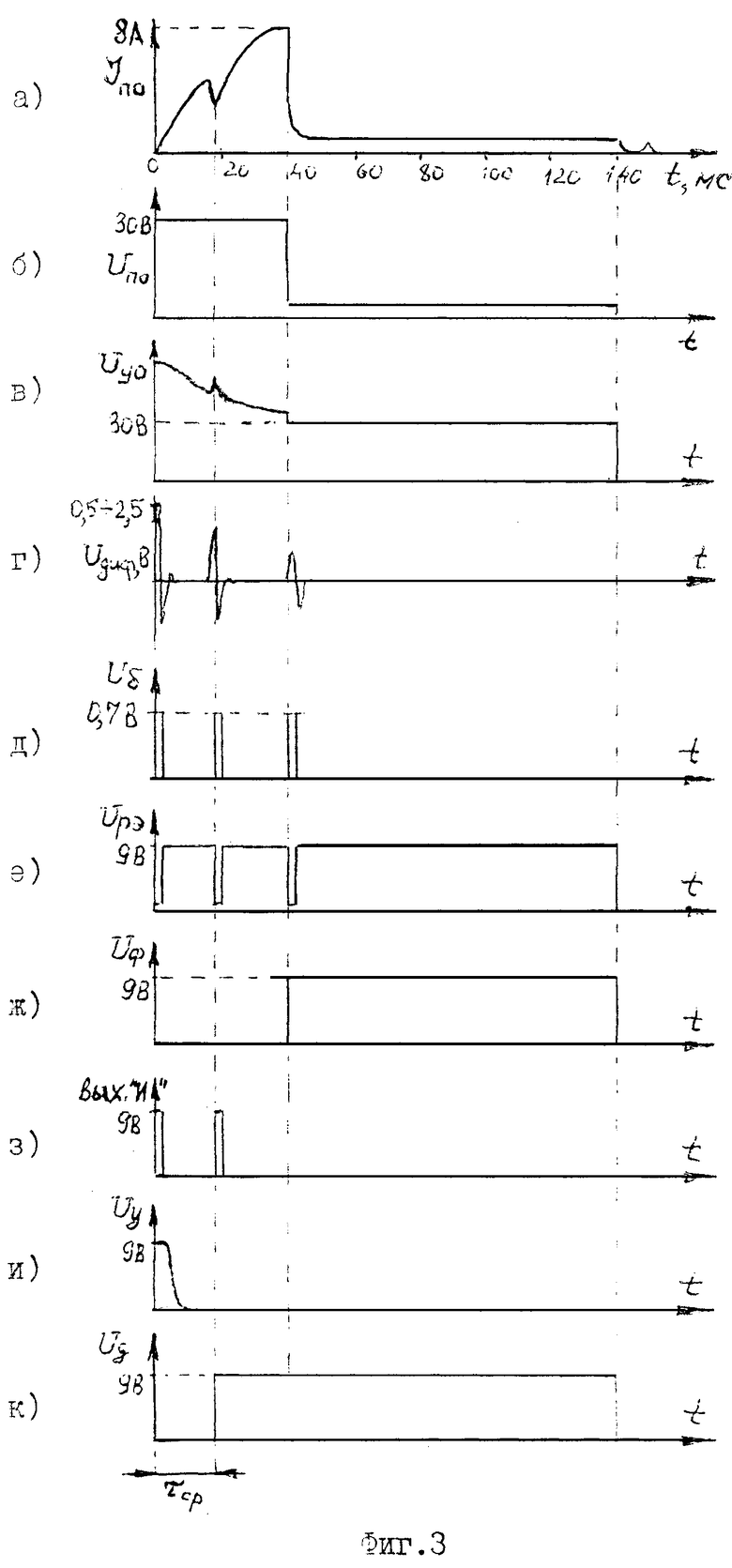
Датчик автоматического контроля срабатывания двухобмоточного ЭМ по п.2, реализующий предлагаемый способ, содержит (см. фиг.1) последовательно соединенные чувствительный элемент (УО) 1, дифференциатор 2 и схему сравнения 3, а также R-S триггер 4, выход которого является выходом датчика, формирователь измерительного интервала (ФИИ) 5, элемент И 6 и блок установки нуля (БУН) 7, причем вход установки нуля R-S триггера соединен с выходом БУН 7, а вход установки единицы - с выходом элемента И 6, входы которого соединены с выходом схемы сравнения 3 и инверсным выходом ФИИ 5, вход которого соединен с ПО 8 ЭМ, а прямой выход - с входом БУН 7. Электрическая принципиальная схема возможного исполнения датчика по п.2 приведена на фиг.2. Работает он следующим образом. При подаче напряжения на ПО ЭМ (см. фиг.3б) на удерживающей обмотке наводится э.д.с. (см. фиг.3в), пропорциональная изменению тока в ПО (см. фиг.3а). Этот сигнал поступает на дифференциатор, выполненный на элементах С1 и R3, на выходе которого формируется производная его входного сигнала (см. фиг.3г). С выхода дифференциатора сигнал поступает на схему сравнения, выполненную на транзисторе VTI, где подавляются импульсы с амплитудой ниже заданного уровня, который задается цепью R5-VД4-R6. Сигнал на выходе этой цепи Us показан на фиг.3д. Схема сравнения осуществляет усиление и ограничение сигнала производной, что позволяет выделять импульс срабатывания при заданном разбросе напряжения питания во всем рабочем диапазоне температур. Для подавления коммутационных помех, возникающих при работе других сильноточных устройств, подключенных к тому же источнику питания, что и ЭМ, на входе схемы сравнения установлено инерционное звено R4-С2-R6. Сигнал с выхода схемы сравнения (см. фиг.3е) поступает на элемент Д1.2, реализующий логическую функцию И по низким уровням. На второй вход этого элемента подается сигнал с инверсного выхода ФИИ (см. фиг.3ж), который разрешает прохождение импульса с выхода схемы сравнения только во время подачи напряжения питания на ПО. Для формирования измерительного интервала используется сигнал с пусковой обмотки, который нормируется цепью VД5-R7-VД6 и инвертируется элементом Д1.1. БУН реализован на элементах C4-R11. Сигнал на выходе БУН показан на фиг.3и. На фиг.3з показан сигнал на выходе элемента И, а на фиг.3к - на выходе R-S триггера. Выходной сигнал датчика обнуляется при снятии питающего напряжения с обмоток ЭМ. Элементы R1, R2, VД1, VД2, VД3, R10 и C3 образуют цепь питания датчика, обеспечивающую его стабильную работу во время подачи напряжения питания на обмотки ЭМ.
Применение предлагаемых способа и датчика позволит повысить точность определения момента срабатывания и надежность. Высокое быстродействие датчика при использовании его для управления схемой включения ЭМ позволит экономить энергопотребление ЭМ, что особенно важно при применении его в составе бортовой автоматики при ограниченном энергоресурсе. Это позволит также снизить выделение тепла в обмотках, а значит и повысить надежность работы. Использование в качестве ЧЭ УО позволит применить датчик для контроля срабатывания уже эксплуатируемых ЭМ без их дополнительной доработки, а удаление из цепи питания ПО дополнительного сопротивления позволит повысить надежность и энергетические характеристики ЭМ. Предлагаемый датчик не требует дополнительного автономного источника питания. Он допускает размещение как в бортовом блоке управления, так и в виде автономного устройства, подсоединенного только к проводам, идущим к обмоткам ЭМ, что позволяет использовать его как для управления схемой включения ЭМ, так и для проведения различных испытании и регламентных проверок функционирования ЭМ. Предлагаемый датчик допускает многократное резервирование для достижения заданной надежности.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ СРАБАТЫВАНИЯ ЭЛЕКТРОМАГНИТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2024 |
|
RU2840853C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ КЛАПАНОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2022 |
|
RU2783869C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ КЛАПАНОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2022 |
|
RU2795208C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ЯКОРЯ ЭЛЕКТРОМАГНИТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2022 |
|
RU2793305C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ВРЕМЕНИ СРАБАТЫВАНИЯ ЭЛЕКТРОМАГНИТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2021 |
|
RU2773298C1 |
| Устройство для измерения контактного нажатия электромагнитных реле | 1982 |
|
SU1129665A1 |
| СПОСОБ МОНИТОРИНГА ДАВЛЕНИЯ НА ВХОДЕ ГАЗОВОГО ЭЛЕКТРОМАГНИТНОГО КЛАПАНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2024 |
|
RU2832565C1 |
| СПОСОБ ДИАГНОСТИКИ СОСТОЯНИЯ ЯКОРЯ ЭЛЕКТРОМАГНИТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2020 |
|
RU2746964C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ЯКОРЯ ЭЛЕКТРОМАГНИТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2020 |
|
RU2747003C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ КЛАПАНОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2020 |
|
RU2756292C1 |
Изобретение относится к области ракетной электротехники и может быть преимущественно использовано для дистанционного автоматического контроля срабатывания электромагнита (ЭМ), работающего в тяжелых эксплуатационных условиях и обеспечивающего высокое быстродействие. Технический результат от использования данного изобретения состоит в повышении точности и надежности заявленных способа и устройства для его осуществления. Сущность изобретения состоит в том, что для достижения указанного выше технического результата в датчик введены формирователь измерительного интервала, элемент И и блок установки нуля, в качестве чувствительного элемента использована удерживающая обмотка электромагнита, причем вход установки нуля R-S триггера соединен с выходом блока установки нуля, а вход установки единицы с выходом элемента И, входы которого соединены с выходом схемы сравнения и инверсным выходом формирователя измерительного интервала, вход которого соединен с пусковой обмоткой электромагнита, а прямой выход соединен со входом блока установки нуля, благодаря чему сигнал выявляют в напряжении на удерживающей обмотке путем сравнения первой производной этого напряжения с заданной величиной в течение измерительного интервала, формируемого спустя 0,2÷0,5 минимального времени срабатывания после подачи напряжения на пусковую обмотку до момента, соответствующего гарантированному времени срабатывания электромагнита. 2 н.п. ф-лы, 3 ил.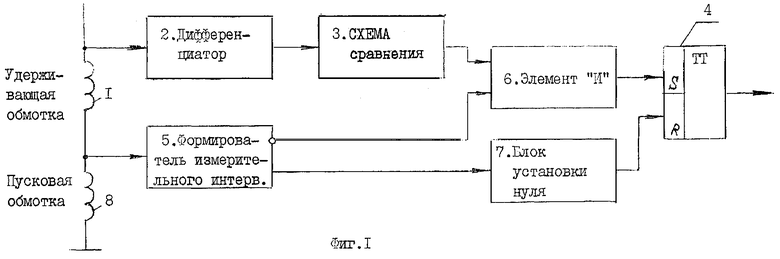
| Авт.св | |||
| Устройство для управления электромагнитом | 1983 |
|
SU1094074A1 |

