Широкое развитие речного транспорта и растущие из года в год перевозки водным путем самых разнообразных материалов выдвигают на первое место вопрос о наиболее рентабельном способе погрузки и выгрузки этих материалов из речных судов. Речной транспорт является одним из наиболее дешевых видов транспорта, однако, отсутствие, в большинстве случаев, должной механизации погрузочно-разгрузочных работ значительно понижает экономический эффект речных перевозок. Наиболее распространенным типом судов, служащих для водного транспорта различных материалов, являются баржи.
Существует большое количество сыпучих материалов, допускающих безболезненную перевозку их в открытых типах барж, например, руда, гравий, марганец, кокс, каменный уголь и др.
Для выгрузки подобного рода сыпучих материалов с барж предлагается подвижное разгрузочное устройство с использованием черпакового элеватора, выполненного (как это уже имело место в аналогичных случаях) подвижным вдоль принимающей с него перегружаемый материал транспортерной ленты. Согласно изобретению, для достижения наибольшей производительности и экономической эффективности устройство снабжено приспособлением, предназначенным для автоматической работы выгружающего элеватора путем периодической подачи его к материалу по мере выгрузки. С этой целью элеватор подвешен к подвижной вдоль траспортера тележке эксцентрично, имея наклон в сторону рабочего хода, и снабжен тяжелым маятником с контактом, свободно подвешенным на оси вращения элеватора внутри кожуха. Контакт маятника взаимодействует с соответствующим контактом на кожухе элеватора, замыкая периодически цепь электрического тока к приводу тележки и осуществляя, тем самым, перемещение черпакового элеватора к материалу.
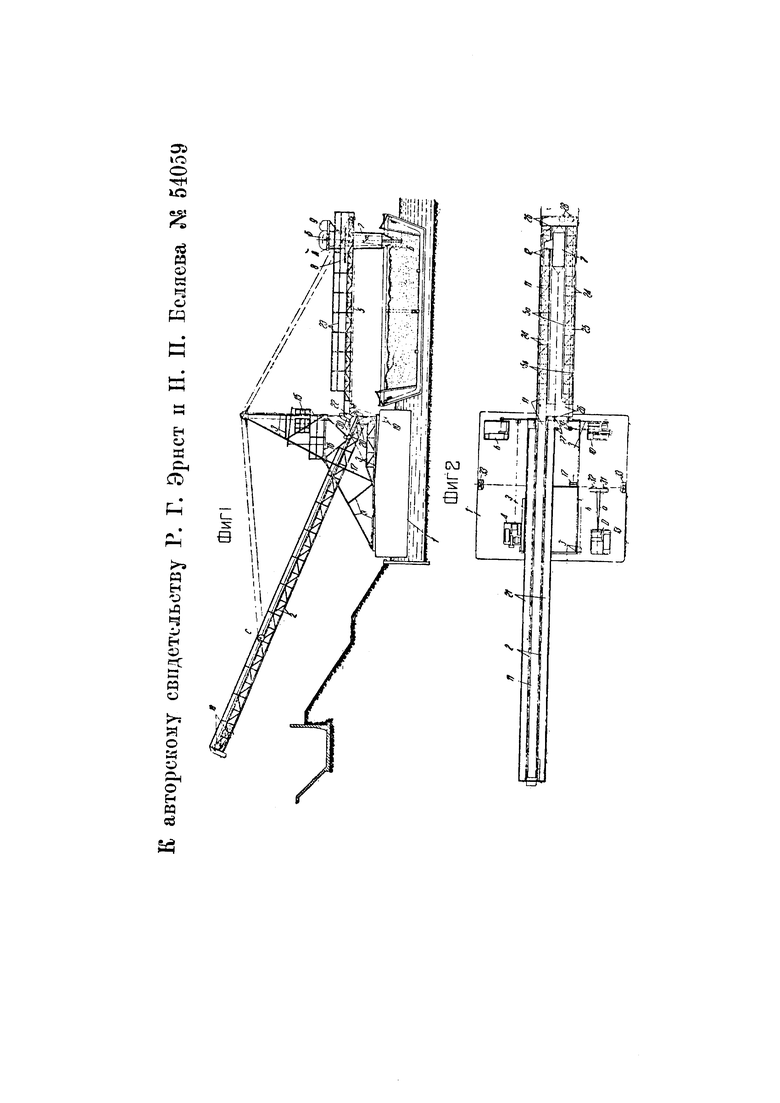
На чертеже фиг. 1 и 2 изображают общий вид подвижного разгрузочного устройства в двух проекциях (вид сбоку и сверху).
Предлагаемое разгрузочное устройство состоит из плашкоута 1, представляющего собою трюмное судно, выполненное из дерева или сварным из железа и предназначенное сообщить пловучесть выгружателю и служить как бы фундаментом для соединения всех его остальных частей. Часть трюма плашкоута заполняется баластом для придания устройству необходимой устойчивости. Поверх палубы плашкоута установлена на подкладках несущая конструкция 3, связанная фундаментными болтами с бимсами и кильсонами плашкоута. Несущая конструкция 3 представляет собой жесткую, металлическую, сварную портальную опору. В нижней части несущей конструкции 3 к вертикальным опорным листам поворотно прикреплена при помощи сквозной оси, образующей шарнир 20, стрела 2, состоящая из двух рабочих вертикальных сварных ферм, соединенных двумя ветровыми решетками, и являющаяся рамой ленточного транспортера 11. К нижней части стрелы на выносных консолях, параллельно рабочим фермам, уложены мостки 21 с перилами для обслуживания или ремонта ленточного транспортера 11. На верхнем конце стрелы 2 установлен привод 18 транспортера 11.
В точке С к рабочим фермам стрелы на сквозной оси установлены два канатных блока (шкива), являющиеся подвижными блоками полиспаста, посредством которого, при помощи электролебедки 4, производится, изменение угла наклона стрелы 2. Неподвижные блоки этого полиспаста укреплены в верхней части несущей конструкции 3.
Над шарниром 20 стрелы 2 к несущей конструкции 3 приварены опорные листы, на которые опирается помощью шарниров 22 мост 5. Ко второму концу моста прикреплены по обеим его сторонам, два канатных блока (шкива). Эти канатные блоки являются подвижными блоками второго полиспаста, посредством которого, при помощи электролебедки 6, осуществляется изменение угла наклона моста. Неподвижные блоки этого полиспаста также укреплены в верхней части несущей конструкции 3. Мост 5 представляет собой жесткую, сварную, металлическую раму и состоит: а) из двух швеллеров 5а (фиг. 2), идущих вдоль всего моста и обращенных полками друг к другу; б) из двух вспомогательных вертикальных ферм 5б, образующих наружные кромки моста; к фермам 5б приварены перила 23; в) из четырех ветровых решеток, соединяющих между собой верхнюю и нижнюю полки каждого из швеллеров с верхним и нижним поясами прилегающей вспомогательной фермы и нижнюю полку каждого из швеллеров с нижним поясом прилегающей вспомогательной фермы. На фиг. 2 они обозначены цифрами 24 и показаны пунктиром, так как над одними из них проходит настил мостков 25 для обслуживания, а над другими - лента транспортера 11 и г) в начале и в конце моста швеллеры соединены между собой и с вспомогательными фермами четырьмя торцевыми фермами жесткости 26. Во всей остальной части моста швеллеры 5а между собой ничем не соединены, так что между ними, почти по всей длине моста, образуется свободный проем, сквозь который проходит вертикальный элеватор 7, прикрепленный на шарнире А к тележке. 8. Тележка 8 снабжена четырьмя бегунками с ребордами, которые катятся по нижним полкам швеллеров 5а. К обоим концам тележки 8 прикреплены концы двух проволочных канатов. Один из этих канатов проходит через отклоняющие блоки 27 (фиг. 2) и подходит к барабану лебедки 10 снизу; второй из канатов проходит через блоки 28 и 29 и подходит к барабану лебедки 10 сверху. Благодаря этому, при вращении барабана лебедки 10 в одну сторону, тележка 8 вместе с элеватором будет приближаться к плашкоуту 1, при вращении же барабана в другую сторону тележка и элеватор будут удаляться от плашкоута. Таким образом, мост 5 является жесткой рамой, на одной стороне которой уложены мостки 25, на другой стороне по желобчатым роликовым опором проходит ленточный транспортер 11, а в средней части, в длинном прямоугольном проеме, перемещается элеватор 7 на тележке 8.
Рабочая ветвь ленты транспортера 11 огибает возле шарнира 22 и на конце стрелы два оборотных барабана, принимая при этом форму буквы 5. Благодаря этому здесь происходит пересыпка выгружаемого материала. Для предотвращения просыпания его на стороны служит течка 30 (фиг. 1). Холостая ветвь ленты транспортера 11, огибая два оборотных барабана, вблизи шарниров 20 и 22 натягивается третьим натяжным барабаном 19. Барабан 19 укреплен на тележке натяжной станции, и натягивается грузом, подвешенным в трюме на блоках.
На палубе плашкоута установлена лебедка 13, предназначенная для передвигания всего выгружателя параллельно разгружаемой барже. Для этого один канат крепится снизу к одному концу барабана, а второй канат крепится к противоположному концу барабана сверху (точка Д). Направление ручьев по всей длине барабана одно, например, правое. Оба каната навиты до среднего ручья барабана так, что один канат сходит с верхней точки этого ручья, а второй канат сходит под первым с нижней точки того же ручья (из-под низа барабана). Благодаря этому, при вращении барабана по часовой стрелке, канат а, сходящий с верхней точки среднего ручья, будет с барабана сматываться, а канат b, сходящий с нижней точки, будет наматываться на барабан. Далее канат а отклоняется блоком 31 (фиг. 2) и, пройдя между направляющими деревянными роликами 33, крепится к причальному брусу. Канат b отклоняется блоком 32 и, пройдя между вторым комплектом направляющих роликов 33, крепится ко второму причальному брусу. Поэтому, при вращении барабана лебедки 13 в одном направлении, выгружатель начнет двигаться параллельно разгружаемой барже в одну сторону, при вращении же барабана в противоположном направлении он будет двигаться параллельно барже в другую сторону. Таким образом, лебедка 13 подобна лебедке 10, с той разницей, что лебедка 10 передвигает элеватор 7, а лебедка 13-весь выгружатель.
На высоте, примерно, 3,5 м от палубы плашкоута на несущей конструкции 3 устроена площадка 16 с настилом и перилами. Площадка соединена с палубой плашкоута лестницей 17. На площадке 16 установлена кабина машиниста 15. В кабине устанавливаются: 1) две кнопки пуска и остановки транспортера 11; 2) две кнопки пуска и остановки элеватора 7, снабженного самостоятельным электроприводом 9, который получает питание от троллейных проводов, натянутых вдоль моста; 3) две кнопки включения и выключения автоматического передвижения элеватора во время рабочего хода; 4) поворотное кресло для машиниста; 5) с правой стороны машиниста установлены два сдвоенных, при помощи универсальной ручки, контроллера. При движении ручки в горизонтальной плоскости вперед (от машиниста) мотор лебедки 10 начинает вращаться в одну сторону, и элеватор 7 удаляется от кабины машиниста; при движении ручки в горизонтальной плоскости назад (к машинисту) мотор лебедки 10 начинает вращаться в противоположную сторону, и элеватор 7 приближается к машинисту. При движении той же ручки в вертикальной плоскости вверх мотор лебедки 6 начинает вращаться в одну сторону, и мост поднимается вверх; при движении той же ручки вниз мотор лебедки 6 вращается в противоположную сторону, и мост 5 опускается вниз; 6) с левой стороны кресла машиниста находятся два таких же сдвоенных контроллера с универсальной ручкой. При движении этой второй ручки в горизонтальной плоскости вбок (от машиниста) включается лебедка 13, и выгружатель начинает двигаться вдоль баржи влево; при движении ручки вбок на себя выгружатель начинает двигаться вдоль баржи вправо. При движении этой же второй ручки вверх включается лебедка 4, и стрела 2 начинает подниматься вверх; при движении ручки вниз стрела 2 опускается вниз. Машинист, сидя в кресле, держит первую ручку в правой руке, вторую ручку -в левой руке и, передвигая их одновременно или порознь, управляет всеми лебедками выгружателя. Кроме того, в кабине, утепленной войлочными прослойками между двойной обшивкой стен, имеются: а) шкаф для одежды, б) выключатели наружного и внутреннего освещения, в) переносный вентилятор и г) электропечка.
Для облегчения работы машиниста и для повышения производительности выгружателя передвижение элеватора вдоль моста, во время рабочего хода, автоматизировано следующим образом. Элеватор 7 подвешен к тележке эксцентрично и в свободном состоянии висит несколько наклонно по линии ББ (фиг. 1). Внутри кожуха элеватора на сквозной оси шарнира А подвешен массивный маятник, занимающий всегда вертикальное положение, вне зависимости от того, наклонен элеватор или нет. На маятнике укреплен один контакт, а на кожухе элеватора второй контакт. Путем регулировки они устанавливаются так, что если элеватор висит свободно, т.е. по линии ББ, или близко к ней, и образует с вертикалью угол α, равный 4-5°, то контакты замыкаются, и через промежуточное реле и контакторную панель автоматически включается лебедка 10, причем тележка 8 с шарниром А начинает приближаться к кабине машиниста. Однако нижний зачерпывающий конец элеватора не сможет следовать при этом за шарниром А, так как он упрется в лежащий передним в барже толстым слоем уголь (или другой сыпучий материал). Скорость передвижения тележки 8 значительно превышает производительность элеватора, и поэтому постепенно угол наклона элеватора к вертикали будет, становиться все меньше. Когда элеватор примет вертикальное положение, контакты (на маятнике и кожухе элеватора) разомкнутся, лебедка 10 выключается, и тележка 8 вместе с шарниром А останавливается, но элеватор будет стремиться принять снова наклонное положение по линии ББ благодаря несимметричному расположению шарнира А и электропривода 9; поэтому нижний зачерпывающий конец элеватора будет с силой давить на лежащий перед ним уголь, и коэфициент заполнения черпаков увеличится.
По мере того, как черпаки элеватора будут уносить лежащий перед ним уголь, угол α наклона элеватора к вертикали будет возрастать, пока снова не достигнет значения 4-5°; после этого процесс начинается сначала.
Таким образом, элеватор 7, покачиваясь, будет постепенно приближаться к кабине машиниста, интенсивно выгружая уголь из баржи и подавая его по течке 12 на ленточный транспортер 11. Последний подает его на берег, в данном случае, в береговую скреперную канаву.
Когда элеватор 7 доотказа приблизится к кабине и вычерпает, таким образом, из баржи широкую полосу материала (трапецеидального сечения - благодаря углам естественного откоса) по всей ширине баржи, то машинист, нажав кнопку "стоп", автоматически остановит лебедку 10. Затем, подняв правой рукой правую рукоятку контроллеров вверх, он включает лебедку 6, и мост 5 начнет подниматься вверх. При передвижении той же ручки от себя вперед включается лебедка 10, вследствие чего элеватор 7 начнет удаляться от кабины, совершая свой холостой ход. Когда нижний конец элеватора окажется выше поперечных связей баржи и лежащего в ней материала, машинист передвигает левой рукой левую рукоятку от себя вбок, включая лебедку 13, причем выгружатель начнет передвигаться вдоль баржи. Когда он пройдет расстояние 1,5-2 м, машинист повертывает левую ручку в нейтральное положение, и выгружатель останавливается. Затем машинист опускает правую рукоятку вниз, и мост 5 начинает опускаться. Когда мост 5 примет горизонтальное положение, машинист передвигает правую рукоятку в горизонтальное положение, - мост останавливается. К этому времени элеватор успеет передвинуться вдоль всего моста и, закончив холостой ход, занять свое крайнее правое положение (обозначено на фиг. 1 линией ББ), соответствующее началу рабочего хода. Поэтому машинист повертывает правую ручку в нейтральное положение и нажимает кнопку "пуск" автоматики. Рабочий цикл начинается сначала.
Когда, таким образом, верхний слой материала будет выгружен по всей длине баржи, выгружатель начинает двигаться параллельно барже в противоположном направлении, выгружая второй слой материала. Мост 5 при этом, во время рабочего хода элеватора 7, может оставаться горизонтальным, а не опущенным вниз, так как по мере выгрузки материала баржа будет всплывать. Расстояние от палубы плашкоута 1 до шарнира 22 выбрано так, что выгрузка основной части материала из баржи будет осуществляться за два хода выгружателя вдоль баржи (два слоя); третий ход будет нужен только для подчистки остатков материала. Все лебедки выгружателя приводятся в движение крановыми закрытыми электромоторами.
Редукторы на всех лебедках шестеренчатые, на шарикоподшипниках, в масляной ванне. На лебедках установлены автоматические колодочные термозы, с приводом от тормозных электромагнитов, и ограничители хода - концевые шпиндельные выключатели, автоматически выключающие мотор лебедки после определенного числа оборотов барабана лебедки.
Подвод питания к выгружателю осуществляется при помощи гибкого бронированного кабеля типа "врубового".
Все электрооборудование выгружателя стандартное.
Согласно расчету производительности выгружателя, произведенному авторами на основании технического проекта, среднечасовая производительность выгружателя (с учетом всех холостых ходов), при выгрузке антрацитового штыба АШ составляет около 70-80 т/час. При выгрузке материалов с большим насыпным весом, чем штыб, производительность выгружателя будет соответственно больше, а стоимость выгрузки 1 тонны ниже.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЛОВУЧИЙ ПЕРЕГРУЖАТЕЛЬ | 1937 |
|
SU54944A1 |
| ПЕРЕДВИЖНОЙ РАЗГРУЗОЧНЫЙ КОМПЛЕКС | 2005 |
|
RU2414410C2 |
| Одноковшовый гидравлический экскаватор с механизмом эвакуации грунта | 1990 |
|
SU1776721A1 |
| ПНЕВМОКАРКАСНОЕ ЗВЕНО И АВТОМОБИЛЬ ДЛЯ СКЛАДЫВАНИЯ, ПОГРУЗКИ И ПЕРЕВОЗКИ ЗВЕНЬЕВ МОБИЛЬНОГО ПАРОМНО-МОСТОВОГО ПАРКА | 1999 |
|
RU2174571C2 |
| Плавучее плотопогрузочное устройство | 1935 |
|
SU50064A1 |
| КРАН СТРЕЛОВОГО ТИПА | 2006 |
|
RU2305064C1 |
| БАШЕННЫЙ КРАН | 2006 |
|
RU2307783C1 |
| Двухбарабанная лебедка | 1937 |
|
SU54904A1 |
| Мостовое устройство для добычи полезных ископаемых открытым способом | 1982 |
|
SU1077986A1 |
| КРАН-ПОГРУЗЧИК (ВАРИАНТЫ) | 2006 |
|
RU2317248C2 |
1. Подвижное разгрузочное устройство, преимущественно для выгрузки сыпучих материалов из барж, с применением черпакового элеватора, свободно подвешенного к тележке, подвижной вдоль ленточного транспортера, принимающего выгружаемый материал и передающего его на выносящий транспортер, отличающееся тем, что элеватор снабжен приспособлением, автоматически управляющим приводом ходовой его тележки для периодической подачи к материалу по мере его выгрузки.
2. Форма выполнения разгрузочного устройства по п. 1, отличающаяся тем, что элеватор подвешен к тележке эксцентрично с наклоном в сторону рабочего хода и снабжен свободно подвешенным внутри кожуха на оси его вращения тяжелым маятником с контактом, замыкающим цепь электрического тока к приводу тележки при взаимодействии с соответствующим контактом на кожухе элеватора.
