1
Изобретение относится к грузоподъемному оборудованию, монтируемому на самоходном шасси, и может быть использовано в лесозаготовительной промышленности, в частности на плаваюш:ем тракторе, работающем на лесосплаве.
Известны манипуляторы, содержащие поворотную при помощи приводов стрелу с рукоятью, на свободном конце которой установлен рабочий орган 1.
Недостаток известных манипуляторов заключается в том, что получение пологой траектории перемещения рабочего органа, необходимой при работе на воде, возможно только при совместном движении стрелы и рукояти. При этом оператор управлять одновременно двумя независимыми приводами, что усложняет его работу.
Наиболее близким к предлагаемому по технической сущности является манипулятор, содержащий стрелу с приводом, рукоять с рабочим органом, которая щариирно соединена со стрелой при помощи тяги и снабжена гидроцилиндроим ее поворота 2.
Однако известный манипулятор имеет сложную конструкцию из-за наличия трех независимых приводов.
Промежуточная тяга, соединяющая стрелу с рукоятью в этом манипуляторе, обеспечивает более благоприятные условия для получения пологой траектории рабочего органа. Однако реализуются эти возможности только при одновременном управлении двумя шарнирными трехзвенными механизмами, что усложняет работу оператора и в конечном итоге приводит к снижению производительности машины.
Цель изобретения - упростить конструкцию манипулятора для обеспечения простоты управления и повысить его надежность работы на плаву при подтаскивании груза.
Это достигается тем, что стрела снабжена выдвижной балкой, которая выполнена с возможностью возвратно-поступательного перемещения при помощи гидроцилиндра поворота рукояти, причем последняя шарнирно соединена со свободным концом выдвижной балки, а тяга шарнирно соединена со свободным концом рукояти.
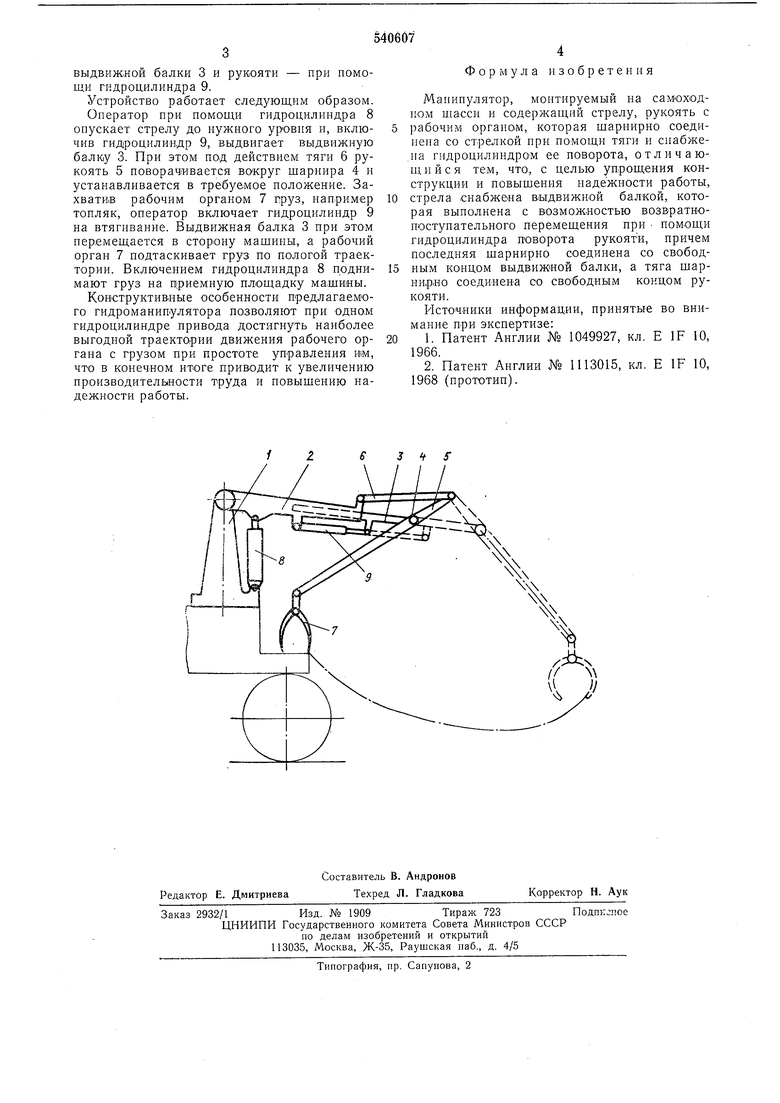
0 На чертеже изображен манипулятор при захвате на минимальном и максимальном вылетах стрелы.
На поворотной колонке 1 шарнирно закреплена стрела 2, в которой установлена
5 выдвижная балка 3, соединенная шарниром 4 с рукоятью 5. Рукоять 5 при помощи тяги 6 шарнирно соединена со стрелой 2. На свободном конце рукояти 5 шарнирно закреплен рабочий орган 7. Привод стрелы 2 осу0 ществлеп при помощи гидроцилипдра 8, а
выдвиж-ной балки 3 и рукояти - при помощи гидроцилиндра 9.
Устройство работает следующим образом.
Оператор при помощи гидроцилиндра 8 опускает стрелу до иужиого уровня и, включив гидроцилиидр 9, выдвигает выдвижную балку 3. При этом под действием тяги 6 рукоять 5 поворачивается вокруг щарнира 4 и устанавливается в требуемое положение. Захватив рабочим органом 7 груз, например топляк, оператор включает гидроцилиндр 9 на втягивание. Выдвижная балка 3 при этом перемещается в сторону мащииы, а рабочий орган 7 подтаскивает груз по пологой траектории. Включением гидроцилиндра 8 поднимают груз на цриемную площадку машины.
Конструктивные особенности предлагаемого гидроманипулятора позволяют цри одном гидроцилиндре привада достигнуть наиболее выгодной траектории движения рабочего органа с грузом ири простоте управления вм, что в конечном итоге приводит к увеличению производительности труда и повышению надежности работы.
4
Формула изобретения
Манипулятор, монтируемый на самоходном шасси и содержащий стрелу, рукоять с рабочим органом, которая шарнирно соединена со стрелкой ири помощи тяги и сиабже,на гидроцилиндром ее поворота, отлнчаюп,ийся тем, что, с целью упрощения конструкции и повышения надежности работы, стрела снабжена выдвижной балкой, которая выполнена с возможностью возвратнопоступательного перемещения при помощи гидроцилиндра поворота рукояти, причем последняя щарнирно соединена со свободным концом выдвижной балки, а тяга щарнирно соединена со свободным концом рукояти.
Источники информации, принятые во внимание при экспертизе:
1. Патент Англии № 1049927, кл. Е IF 10, 1966.
2. Патент Англии № 1113015, кл. Е IF 10, 1968 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ СРЕЗАНИЯ ДЕРЕВЬЕВ | 1972 |
|
SU423437A1 |
| МАНИПУЛЯТОР | 2005 |
|
RU2296042C2 |
| УСТРОЙСТВО ДЛЯ ЗАМЕНЫ ШПАЛ | 1999 |
|
RU2180379C2 |
| МАНИПУЛЯТОР | 2008 |
|
RU2363148C1 |
| Манипулятор лесозаготовительной машины | 1978 |
|
SU676235A1 |
| Погрузчик | 1989 |
|
SU1687571A1 |
| МАНИПУЛЯТОР | 2006 |
|
RU2305638C1 |
| ПОДЪЕМНИК АВТОМОБИЛЬНЫЙ ГИДРАВЛИЧЕСКИЙ | 2001 |
|
RU2199484C2 |
| ПОДЪЕМНОЕ УСТРОЙСТВО БЕЗОПАСНОЙ ПОГРУЗКИ ЖИВОТНЫХ В ТРАНСПОРТНЫЕ СРЕДСТВА И РАЗГРУЗКИ С НИХ | 2011 |
|
RU2499696C2 |
| КРАН-МАНИПУЛЯТОР | 2004 |
|
RU2274559C1 |
J 4
