1
Изобретение относится к устройствам управления передвижными механизмами.
Известны устройства для сигнализации приближения передвижных механизмов к приводам высокого напряжения.
Ближайшим аналогом можно считать передвижные механизмы, например краны, содержащие двигатели и контроллеры поворотов, подъема и опускания стрелы, блоки сигнализации наличия напряжения, состоящие из антенны, блока усиления, -блока контроля целостности цепей и блока стабилизированного питания.
Недостатком известных передвижных механизмов, снабженных блоками сигнализации наличия напряжения, является то,, что в случае аварийного срабатывания блока не исключаются ощибочные действия машиниста при отводе подвижной части механизма из опасной зоны. Это происходит вследствие того, что при срабатывании и блокировке электропривода передвижного механизма необходимо предварительно отключить устройство с целью отвода подвижной части из опасной зоны. Практика показывает, что в некоторых случаях машинист после включения устройства оставляет контроллер поворотов в том же положении, которое предшествовало моменту возникновения аварийной ситуации, и в результате деблокировки электропривода подвижная часть продолжает движение в сторону проводов высоковольтной линии (ВЛ), приводя к аварии. С другой стороны, пеобходимость осуществления переключений нарушает обычный ритм рабочих операций машиниста, усложняет эксплуатацию, что снижает производительность труда.
Цель изобретения - разработка передвижного механизма, оснащенного устройством защиты от опасного приближения выступающих частей механизма к проводам ВЛ электропередачи, с одними и теми же узлами, управляющими работой механизма и блокирующими его при возникновении опасной ситуации с последующим отводом подвижной части из опасной зоны только в безопасных направлениях. Это достигается тем, что в устройство дополнительно введен логический исполнительный блок с двумя датчиками поворотов, подключенными к входам четырех элементов И, входы двух из них соединены с выходом блока усиления, выхода их и -блока НЕ, подключенного к блоку усиления, - с входами двух триггеров, связанных с другими входами двух
других названных элементов И, а выходы последних подключены к входам блока управления двигателем поворотов, датчик подъема соединен с входом пятого элемента И, другой вход которого подключен к выходу элемента
НЕ, а датчик опускания - непосредственно с
входом блока управления двигателем подъема и опускания стрелы.
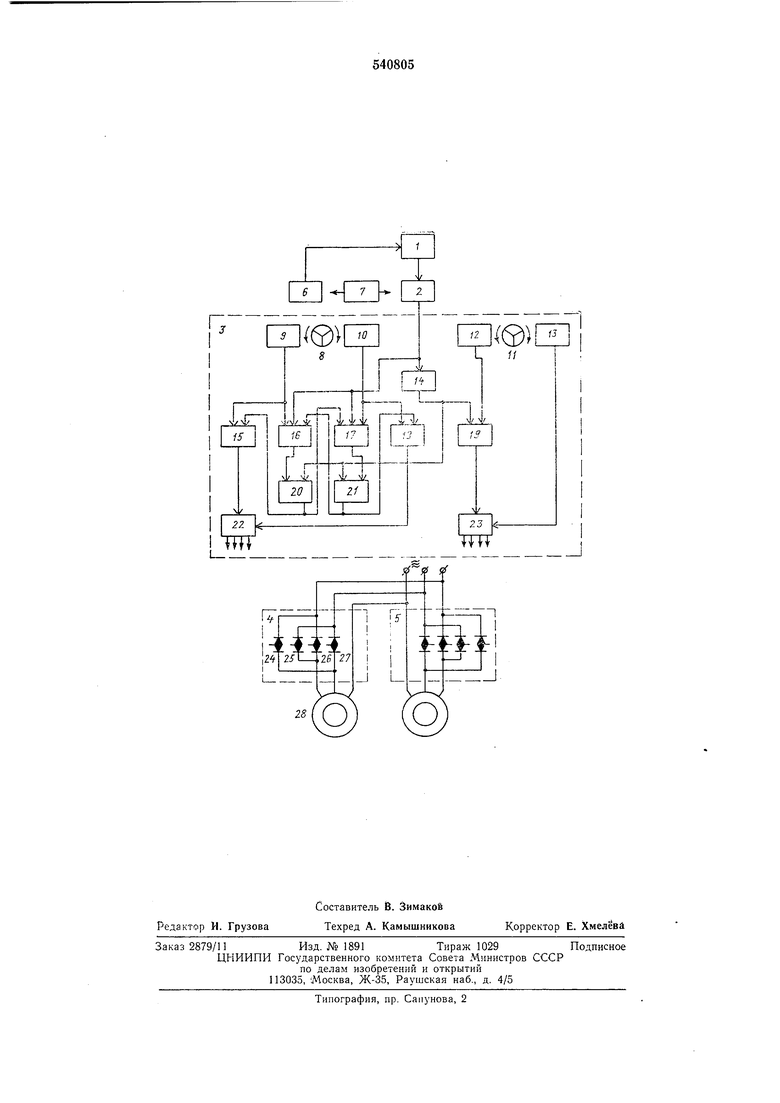
На чертеже представлена блок-схема передвижного механизма, снабженного устройством защиты.
Она содержит антенный блок 1, блок усиления 2, логический исполнительный блок 3, блок 4 управления двигателем поворотов, вентильный блок 5 управления двигателем подъема и опускания подвижной части механизма, блок б контроля целостности цепей и блок 7 стабилизированного нитания.
Логический исполнительный блок 3 включает в себя контроллер 8, бесконтактные датчики 9 и 10 левого и правого новоротов, контроллер И, бесконтактные датчики 12 и 13 подъема и опускания подвижной части, блок i4, производящий логическую операцию НЕ, блоки 15-19, осуществляющие логическую операцию И, триггеры 20, 21 и блоки 22, 23 управления вентильными блоками 4 и 5, которые воздействуют на реверс двигателей привода механизма.
Сущность предлагаемой схемы заключается в том, что блок усиления 2 воздействует на вентильные блоки 4 н 5 через логический иснолнительный блок 3, который после аварийного срабатывания блока усиле 1Ия автоматически подготавливает те цепи управления двигателей привода, которые обеспечивают движение подвил ной части в направлении от проводов высоковольтной линии, и для отвода нодвижной части из онасной зоны отпадает необходимость выключения устройства. Мащинист выполняет онерацию отвода обычным способом - поворотом контроллера.
Таким образом, если машинист ошибочно попытается поднять или провернуть подвижную часть к проводам ВЛ, этого движения не произойдет, так как схем;а управления в этом направлении будет блокирована.
Рассмотрим pai6oTy схемы передвижного механизма.
В нейтральном положении контроллеров 8 и 11 сигналы с да1чиков 9, 10, 12 и 13 не поступают на блоки 22 и 23. Симисторы 24-27 вентильных блоков 4 и 5 занерты, и двигатели обесточены. При повороте контроллера 8, например, влево с датчика 9 и триггера 20 поступают импульсы на блок 15, в результате чего на его выходе появляется сигнал, воздействующий на блок 22, через который происходит отпирание симисторов 24, 25 вентильного блока 4 и, в овою очередь, вращение двигателя влево. Одновременно на блок 16 поступают сигналы с датчика 9 н блока 21, однако, на выходе блока 16 сигнал отсутствует, так как на третьем входе этого блока отсутствует сигнал с блока 2.
При возникновении же аварийной ситуации, т. е. в случае приближения стрелы крана к проводам ВЛ, срабатывает блок 2, с которого па входе блока 16 появляется третий сигнал. В результате на выходе этого блока образуется сигнал, опрокидывающий триггер 20, который, в свою очередь, дает сигнал запрета на блоки 15 и 17.
Симисторы 24, 25, через блок 22 запираются, двигатель останавливается. При этом невозможен и подъем подвижпой части, так как через блок 14 с блока 2 на блок 19 поступил сигнал запрета. Как видно из схемы, опускание и отвод подвижной части в безопасных направлениях возможен без отключения устройства. Это осуществляется в данном случае поворотом контроллера 8 вправо, при этом с выхода блока 18 сигнал поступает на блок 22, симисторы 26,
27 отпираются, и двигатель 28 начинает вращаться вправо. Для опускания подвижной части достаточно повернуть контроллер И вправо. По мере удаления антенны устройства от проводов ВЛ сигнал ослабевает, схема устройства возвращается в исходное ноложение. с)то происходит вследствие того, что инвертируемый сигнал с выхода блока 14 опрокидывает триггер 20 в исходное состояние. Схема работает аналогично и при повороте контроллера 8 вправо.
Таким образом, предлагаемый передвижной механизм, снабженный устройством защиты, наряду с блокировкой вращения и подъема подвижной части при ее опасном приближении к проводам ВЛ обеспечивает опускание и отвод только в безопасных паправлепиях. Зтим соверщенно исключаются ощибочные действия машиниста и обеспечивается высокая надежность защиты обслуживающего
персонала.
Формула изобретения
Устройство для унравления передвижным
нодъемным механизмом, содержащее блоки унравления двигателями и контроллеры поворотов, подъема и опускания стрелы, антенный блок, связанный с блоком усиления и контроля цело,стности цепей и блок стабилизирован1ЮГО питания, отличающееся тем, что, с целью повыщепия надежности и безопасности работы механизма путем осуществления отвода подвижной его части из опасной зоны только в безопасных направлениях, дополнительно введен логический исполнительный блок с двумя датчиками поворотов, подключенными к входам четырех элементов И, входы двух из них соединены с выходом блока усиления, выходы которых и блока НЕ, подключенного
к блоку усиления, соединены с входами двух триггеров, связанных с входами двух других названных элементов И, а выходы последних подключены к входам блока управления двигателем поворотов, датчик подъема соединен
с входом пятого элемента И, другой вход которого подключен к выходу упомянутого элемента НЕ, а датчик опускания соединен непосредственно с входом блока управления двигателем подъема и опускания стрелы.
L-iA ,
| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматизированного управления транспортными перемещениями ковша экскаватора-драглайна | 1989 |
|
SU1788163A1 |
| СИСТЕМА БЕЗОПАСНОСТИ КРАНА СТРЕЛОВОГО ТИПА | 2006 |
|
RU2314248C1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ УСТОЙЧИВОСТИ БАШЕННЫХ КРАНОВ ОТ ОПРОКИДЫВАНИЯ | 2012 |
|
RU2542850C2 |
| Устройство для сигнализации об опасном приближении к воздушной линии электропередачи | 1990 |
|
SU1758754A1 |
| СПОСОБ УПРАВЛЕНИЯ ПРИВОДОМ ГРУЗОПОДЪЕМНОЙ МАШИНЫ | 2006 |
|
RU2321534C2 |
| Устройство для управления драглайном | 1977 |
|
SU682607A1 |
| Электромеханический уровнемер | 1975 |
|
SU609058A1 |
| УСТРОЙСТВО БЕЗОПАСНОСТИ ГРУЗОПОДЪЕМНОГО КРАНА | 1999 |
|
RU2151732C1 |
| СПОСОБ УПРАВЛЕНИЯ СКОРОСТЬЮ И КОЛИЧЕСТВОМ ДВИЖЕНИЯ ПЕРЕДВИЖНОГО БЛОКА ДЛЯ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЯ С НАГОЛОВНИКОМ И НАСТИЛОМ УСТАНОВКИ ДЛЯ РЕМОНТА СКВАЖИН | 2003 |
|
RU2353568C2 |
| СПОСОБ ДИАГНОСТИРОВАНИЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ УСТРОЙСТВА БЕЗОПАСНОСТИ ГРУЗОПОДЪЕМНОЙ МАШИНЫ | 2004 |
|
RU2277065C2 |