Изобретение относится к подъемно-транспортному машиностроению и может быть использовано в системах управления и защиты кранов стрелового типа (стреловых, башенных, портальных и др.).
Согласно требованиям нормативных документов стреловые краны должны быть оснащены приборами безопасности, обеспечивающими, в частности, защиту от приближения к проводам линий электропередачи (ЛЭП) и ограничение максимальной высоты подъема грузозахватного органа.
Известно устройство для управления грузоподъемным стреловым краном, содержащее систему безопасности, включающую в себя датчик приближения к ЛЭП и датчик максимальной высоты подъема грузозахватного органа, подключенные к информационным входам контроллера оголовка стрелы, связанного двунаправленной мультиплексной линией связи с другим контроллером системы безопасности, осуществляющим функции управления движениями крана и индикации параметров. К контроллеру оголовка стрелы подключены также габаритный фонарь и фара, причем управляющие сигналы на их включение и отключение передаются по упомянутой мультиплексной линии связи (см. патент Российской Федерации №2242420 С2, B66C 13/18, 23/90, 20.12.2004). Это техническое решение обеспечивает минимальное количество линий связи между кабиной крана и оголовком стрелы, однако существенным ее недостатком является утрата сразу всех функций безопасности при необходимости блокировки функций отключения движений управляющим контроллером, например, при проведении статических и динамических испытаний крана или в процессе перевода кранового оборудования из рабочего положения в транспортное в случае отказа какого-либо элемента системы безопасности. При этом машинист крана вынужден выполнять операции в условиях полного отсутствия защиты от превышения максимальной высоты подъема крюка, что очень опасно, особенно в условиях ограниченной видимости.
Наиболее близкой к предложенной системе является система безопасности крана стрелового типа, содержащая управляющий контроллер, к выходам которого подключены вход модуля аварийной сигнализации и первый управляющий вход модуля блокировки движений, блок защиты от опасного напряжения и датчик максимальной высоты грузозахватного органа, выход которого подключен к информационному входу управляющего контроллера (см. патент Российской Федерации №2151732 C1, B66C 15/00, 23/88, 27.06.2000). Данному техническому решению присущ тот же недостаток, связанный с утратой всех функций безопасности при блокировании функции отключения движений контроллером, как и рассмотренному выше устройству по патенту РФ №2242420.
Задачей, на решение которой направлено заявленное изобретение, является разработка системы безопасности грузоподъемного крана стрелового типа, которая бы обеспечивала повышенную безопасность работы крана в условиях блокировки части функций (защиты от перегрузки, защиты от ЛЭП и т.д.), сохраняя функцию ограничения максимальной высоты подъема грузозахватного органа (крюка). Дополнительной задачей, на решение которой направлено заявленное изобретение, является расширение функциональных возможностей системы.
Поставленные технические задачи достигаются тем, что известная система безопасности крана стрелового типа, содержащая управляющий контроллер, к выходам которого подключены вход модуля аварийной сигнализации и первый управляющий вход модуля блокировки движений, блок защиты от опасного напряжения и датчик максимальной высоты подъема грузозахватного органа, выход которого подключен к информационному входу управляющего контроллера, согласно изобретению снабжена контроллером оголовка стрелы и датчиком включения механизма опускания грузозахватного органа, а модуль блокировки движений имеет второй и третий управляющие входы, при этом контроллер оголовка стрелы соединен двухсторонней линией связи с блоком защиты от опасного напряжения и связан с управляющим контроллером двухсторонним проводным или беспроводным каналом обмена данными, а ко второму и третьему управляющим входам модуля блокировки движений подключены соответственно датчик максимальной высоты подъема грузозахватного органа и датчик включения механизма опускания грузозахватного органа.
Кроме того, система снабжена датчиками параметров навесного оборудования оголовка стрелы, выходы которых подключены к информационным входам контроллера оголовка стрелы.
При этом система может быть снабжена модулем включения исполнительных устройств навесного оборудования, вход которого подключен к управляющему выходу контроллера оголовка стрелы.
Кроме того, управляющий контроллер может иметь дополнительные информационные входы для подключения к ним органов управления навесным оборудованием.
Альтернативно, система может быть снабжена модулем включения исполнительных устройств навесного оборудования, вход которого подключен к управляющему выходу контроллера оголовка стрелы, а управляющий контроллер имеет дополнительные информационные входы для подключения к ним органов управления навесным оборудованием.
Модуль блокировки движений содержит последовательно соединенные блокиратор, первый элемент «ИЛИ», первый элемент «И», второй элемент «ИЛИ» и силовой управляющий элемент, причем вторые входы первого элемента «ИЛИ», первого элемента «И» и второго элемента «ИЛИ» являются соответственно первым, вторым и третьим управляющими входами данного модуля.
Кроме того, система может быть снабжена датчиком ограничения минимального числа витков каната на барабане грузовой лебедки и датчиком включения механизма подъема грузозахватного органа, а модуль блокировки движений имеет четвертый и пятый управляющие входы, при этом датчик ограничения минимального числа витков каната на барабане грузовой лебедки подключен к дополнительному информационному входу управляющего контроллера и к четвертому управляющему входу модуля блокировки движений, к пятому входу которого подключен выход датчика включения механизма подъема грузозахватного органа.
В этом случае модуль блокировки движений содержит последовательно соединенные блокиратор, первый элемент «ИЛИ», первый элемент «И», второй элемент «ИЛИ», второй элемент «И» и силовой управляющий элемент, и третий элемент «ИЛИ», выход которого подключен ко второму входу второго элемента «И», причем вторые входы первого элемента «ИЛИ», первого элемента «И» и второго элемента «ИЛИ» являются соответственно первым, вторым и третьим управляющими входами данного модуля, а первый и второй входы третьего элемента «ИЛИ» являются соответственно четвертым и пятым входами данного модуля.
Сущность изобретения заключается в том, что в случае необходимости работы крана в условиях блокировки функции отключения рабочих движений управляющим контроллером системы безопасности сохраняется функция ограничения максимальной высоты подъема грузозахватного органа и ограничения минимального числа витков на барабане грузовой лебедки, что повышает безопасность работы крана в нештатных ситуациях.
Снабжение системы датчиками параметров навесного оборудования оголовка стрелы, выходы которых подключены к информационным входам контроллера оголовка стрелы, расширяет функциональные возможности системы безопасности за счет обеспечения контроля навесного оборудования, смонтированного на оголовке стрелы крана (гусек, люлька и т.п.).
Наличие в данной системе дополнительного модуля включения исполнительных устройств навесного оборудования оголовка стрелы позволяет подключать к выходу контроллера оголовка стрелы различные исполнительные устройства, расположенные на оголовке стрелы, например механизм горизонтирования пола люльки, фару рабочего освещения и т.п., при этом управление исполнительными устройствами может осуществляется по командам, вырабатываемым контроллером оголовка стрелы на основе сигналов датчиков, подключенных к его входам, а также по командам, поступающим в контроллер оголовка стрелы по двухстороннему каналу обмена данными от органов управления, подключенных к входам управляющего контроллера, что дополнительно расширяет функциональные возможности системы.
Снабжение системы датчиком ограничения минимального числа витков каната на барабане грузовой лебедки и датчиком включения механизма подъема грузозахватного органа позволяет реализовать в системе безопасности дополнительные ограничения для отдельных типов кранов, например ограничение минимального числа витков каната на барабане грузовой лебедки и т.п.
Технический результат от использования заявленного изобретения заключается в повышении безопасности работы крана в нештатных ситуациях.
На фиг.1 и 2 представлены функциональные схемы системы безопасности грузоподъемного крана и модуля блокировки движений по первому примеру исполнения; на фиг.3 и 4 - то же, по второму примеру исполнения.
По первому примеру исполнения система безопасности грузоподъемного крана содержит блок 1 защиты от опасного напряжения, контроллер 2 оголовка стрелы, датчик 3 максимальной высоты грузозахватного органа, управляющий контроллер 4, модуль 5 блокировки движений, модуль 6 аварийной сигнализации и датчик 7 включения механизма опускания грузозахватного органа.
Блок 1 защиты от опасного напряжения расположен на оголовке стрелы и соединен с контроллером 2 оголовка стрелы посредством двухсторонней линии связи. Контроллер 2 оголовка стрелы связан проводным или беспроводным двухсторонним каналом обмена данными с управляющим контроллером 4, расположенным в кабине машиниста или на поворотной раме крана. К выходам управляющего контроллера подключены первый управляющий вход модуля 5 блокировки движений и вход модуля 6 аварийной сигнализации.
С помощью отдельной линии связи датчик 3 максимальной высоты подъема грузозахватного органа подключен к информационному входу управляющего контроллера 4 и ко второму управляющему входу модуля 5 блокировки движений. К третьему управляющему входу модуля 5 блокировки движений подключен датчик 7 включения механизма опускания грузозахватного органа.
При установке на оголовке стрелы дополнительного оборудования, например маневрового гуська, люльки, фары рабочего освещения и т.д., к информационным входам контроллера 2 оголовка стрелы подключаются датчики 8 параметров (датчик освещенности, датчик скорости ветра, датчик угла наклона пола люльки, датчик усилия, датчики длины и угла наклона гуська и т.д.), а к выходу контроллера 2 оголовка стрелы через модуль 9 включения исполнительных устройств 10 навесного оборудования могут быть подключены различные исполнительные устройства (электромагниты гидрораспределителя механизма горизонтирования пола люльки, фары, габаритные огни и т.п.). Управление исполнительными устройствами 10 может осуществляться контроллером 2 оголовка стрелы по сигналам датчиков 8, например включение габаритных огней и фары по сигналу датчика освещенности или управление положением люльки по сигналу датчика угла. Управление исполнительными устройствами 10 может осуществляться также по сигналам от подключенных к информационным входам управляющего контроллера 4 органов 11 управления навесным оборудованием, передаваемых по двухстороннему каналу обмена данными на контроллер 2 оголовка стрелы. По этому же каналу может производиться управление чувствительностью блока 1 защиты от опасного напряжения.
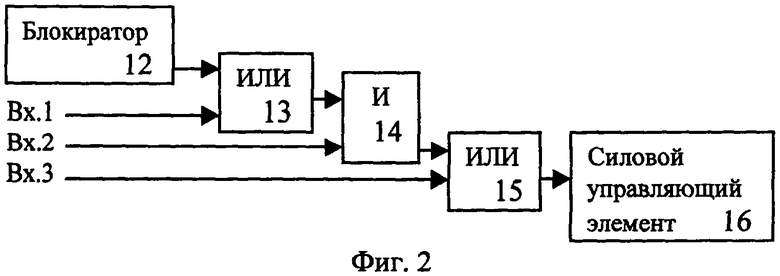
Модуль 5 блокировки движений (фиг.2) содержит последовательно соединенные блокиратор 12, первый элемент «ИЛИ» 13, первый элемент «И» 14 и второй элемент «ИЛИ» 15, выход которого подключен к входу силового управляющего элемента 16, осуществляющего отключение рабочих движений крана, причем вторые входы первого элемента «ИЛИ» 13, первого элемента «И» 14 и второго элемента «ИЛИ» 15 являются соответственно первым, вторым и третьим управляющими входами данного модуля.
В штатном режиме система безопасности крана стрелового типа работает следующим образом. Блоком 1 защиты от опасного напряжения контролируется присутствие вблизи крана проводов ЛЭП, например, по величине напряженности поля, создаваемого протекающим по ним тока. При этом по двухсторонней линии связи сигнал от блока 1 защиты от опасного напряжения поступает на контроллер 2 оголовка стрелы. Информация о наличии или отсутствии ЛЭП вблизи крана транслируется от контроллера 2 по двухстороннему проводному или беспроводному каналу обмена данными на управляющий контроллер 4, который (при наличии в системе соответствующих датчиков) может выполнять также функции ограничения грузоподъемности, координатной защиты и др.
Датчиком 3 максимальной высоты подъема грузозахватного органа контролируется положение грузозахватного органа относительно оголовка стрелы. Сигнал с датчика 3 поступает по отдельной линии связи на информационный вход управляющего контроллера 4, к выходу которого подключен модуль 5 блокировки движений, и на второй управляющий вход модуля 5 блокировки движений.
Если проводов ЛЭП вблизи крана не обнаружено, имеется достаточный зазор между грузозахватным органом и оголовком стрелы и все остальные параметры, контролируемые управляющим контролером 4, находятся в норме, управляющий контроллер 4 вырабатывает сигнал разрешения движений, который поступает на первый управляющий вход модуля 5 блокировки движений. На второй управляющий вход этого модуля также приходит разрешающий сигнал от датчика 3 максимальной высоты подъема грузозахватного органа. Модуль 5 блокировки движений позволяет выполнять движения крана.
Если блоком 1 защиты от опасного напряжения обнаружены провода ЛЭП вблизи оголовка стрелы, либо при опасном сокращении расстояния между крюком и оголовком стрелы (при срабатывании датчика 3 максимальной высоты подъема грузозахватного органа), либо при выходе других контролируемых параметров за установленные пределы, управляющим контроллером 4 вырабатывается сигнал запрета движений крана, поступающий на вход модуля 5 блокировки движений, который отключает движения крана, предотвращая аварийную ситуацию. Одновременно управляющий контроллер 4 включает соответствующие световую и звуковую сигнализации модуля 6 аварийной сигнализации, подключенного к его второму выходу. Для вывода оборудования крана в безопасную зону производят блокировку управляющего контроллера 4 либо специальной кнопкой блокировки этого контроллера, либо вводом режима координатной защиты, как это сделано в прототипе (патент Российской Федерации №2151732), либо включением движения на вывод оборудования крана в рабочую зону и подачей сигнала от соответствующего органа 11 управления на вход управляющего контроллера 4.
При необходимости выполнения движений крана в условиях блокирования некоторых функций системы, например функции ограничения грузоподъемности при проведении статических и динамических испытаний крана, на выходе управляющего контроллера 4 постоянно присутствует сигнал разрешения движений, поступающий на первый вход модуля 5 блокировки движений. При этом если в процессе работы крана грузозахватный орган приблизится к оголовку стрелы на недопустимо близкое расстояние, на втором управляющем входе модуля 5 блокировки движений пропадет разрешающий сигнал с датчика 3 максимальной высоты подъема грузозахватного органа. Модуль 5 отключит движения крана, после чего будет позволено только движение опускания грузозахватного органа (при получении разрешающего сигнала от датчика 7 включения механизма опускания грузозахватного органа).
Силовой управляющий элемент 16 включен и разрешает рабочие движения, если на первый и второй управляющие входы модуля 5 блокировки движений приходят разрешающие сигналы (логические единицы) от управляющего контроллера 4 и от датчика 3 максимальной высоты подъема грузозахватного органа. Если хотя бы от одного из этих устройств придет сигнал на запрет движений (логический ноль), то силовой управляющий элемент 16 отключится, запрещая движения крана.
Если необходимо заблокировать функцию отключения движений управляющим контроллером 4, например, при его неисправности, то с блокиратора 12 подают на вход первого элемента «ИЛИ» 13 сигнал логической единицы и с его выхода на вход элемента «И» 14 поступает логическая единица, независимо от состояния второго входа первого элемента «ИЛИ» 13 (первого управляющего входа модуля блокировки движений). В этом случае состояние управляющего элемента 16 определяется сигналом на втором управляющем входе модуля блокировки движений (втором входе элемента «И» 14). При достижении максимальной высоты подъема грузозахватного органа срабатывает датчик 3 и на второй управляющий вход модуля 5 блокировки движений приходит логический ноль. Движения крана прекращаются. В этом случае возможно только опускание грузозахватного органа при поступлении сигнала логической единицы на третий управляющий вход модуля 5 блокировки движений от датчика 7 включения механизма опускания грузозахватного органа. На выходе второго элемента «ИЛИ» 15 устанавливается логическая единица независимо от состояния его первого входа.
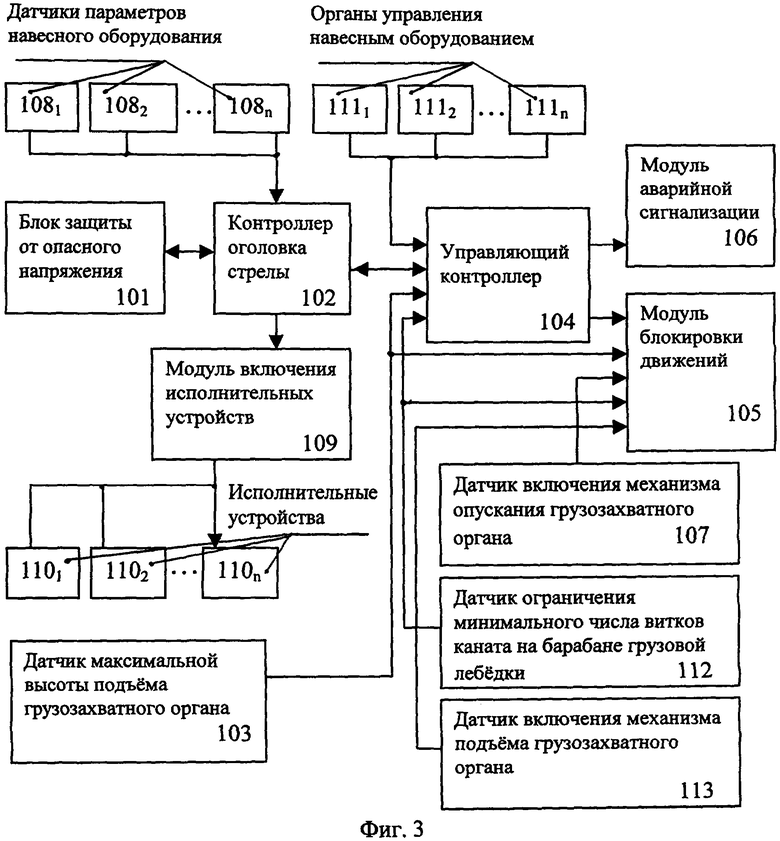
По второму примеру исполнения, представленному на фиг.3, система безопасности крана содержит блок 101 защиты от опасного напряжения, контроллер 102 оголовка стрелы крана, датчик 103 максимальной высоты грузозахватного органа, управляющий контроллер 104, модуль 105 блокировки движений, модуль 106 аварийной сигнализации и датчик 107 включения механизма опускания грузозахватного органа.
Блок 101 защиты от опасного напряжения расположен на оголовке стрелы и соединен с контроллером 102 оголовка стрелы посредством двухсторонней линии связи. Контроллер 102 оголовка стрелы связан проводным или беспроводным двухсторонним каналом обмена данными с управляющим контроллером 104, расположенным в кабине машиниста или на поворотной раме крана. К выходам управляющего контроллера подключены первый управляющий вход модуля 105 блокировки движений и вход модуля 106 аварийной сигнализации.
С помощью отдельной линии связи датчик 103 максимальной высоты подъема грузозахватного органа подключен к информационному входу управляющего контроллера 104 и ко второму управляющему входу модуля 105 блокировки движений. К третьему управляющему входу модуля 105 блокировки движений подключен датчик 107 включения механизма опускания грузозахватного органа.
При установке на оголовке стрелы дополнительного оборудования, например маневрового гуська, люльки, фары рабочего освещения и т.д., к информационным входам контроллера 102 оголовка стрелы подключаются датчики 108 параметров (датчик освещенности, датчик скорости ветра, датчик угла наклона пола люльки, датчик усилия, датчики длины и угла наклона гуська и т.д.), а к выходу контроллера 102 оголовка стрелы через модуль 109 включения исполнительных устройств 110 навесного оборудования могут быть подключены различные исполнительные устройства (электромагниты гидрораспределителя механизма горизонтирования пола люльки, фары, габаритные огни и т.п.). Управление исполнительными устройствами 110 может осуществляться контроллером 102 оголовка стрелы по сигналам датчиков 108, например включение габаритных огней и фары по сигналу датчика освещенности или управление положением люльки по сигналу датчика угла. Управление исполнительными устройствами 110 может осуществляться также по сигналам от подключенных к информационным входам управляющего контроллера 104 органов 111 управления навесным оборудованием, передаваемых по двухстороннему каналу обмена данными на контроллер 102 оголовка стрелы. По этому же каналу может производиться управление чувствительностью блока 101 защиты от опасного напряжения.
Кроме того, система содержит датчик 112 ограничения минимального числа витков каната на барабане грузовой лебедки и датчик 113 включения механизма подъема грузозахватного органа, при этом управляющий контроллер 104 имеет дополнительный информационный вход для подключения датчика 112, а модуль блокировки движений 105 имеет дополнительно четвертый и пятый управляющие входы. Датчик 112 ограничения минимального числа витков каната на барабане грузовой лебедки подключен к соответствующему информационному входу управляющего контроллера 104 и к четвертому управляющему входу модуля 105 блокировки движений, к пятому входу которого подключен выход датчика 113 включения механизма подъема грузозахватного органа.
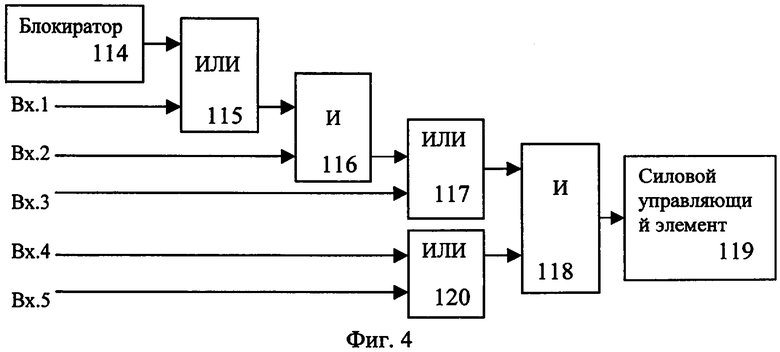
По данному примеру исполнения системы модуль 105 блокировки движений содержит (см. фиг.4) последовательно соединенные блокиратор 114, первый элемент «ИЛИ» 115, первый элемент «И» 116, второй элемент «ИЛИ» 117, второй элемент «И» 118, и силовой управляющий элемент 119, и третий элемент «ИЛИ» 120, выход которого подключен к второму входу второго элемента «И» 118, причем вторые входы первого элемента «ИЛИ» 115, первого элемента «И» 116 и второго элемента «ИЛИ» 117 являются соответственно первым, вторым и третьим управляющими входами данного модуля, а первый и второй входы третьего элемента «ИЛИ» 120 являются соответственно четвертым и пятым входами данного модуля.
Работа данной системы безопасности крана аналогична работе описанной выше системы по первому примеру исполнения и отличается только тем, что силовой управляющий элемент 119 включен и разрешает движения крана только при наличии на четвертом управляющем входе модуля 105 блокировки движений разрешающего сигнала от датчика 112 ограничения минимального числа витков каната на барабане грузовой лебедки. В случае достижения максимальной величины опускания грузозахватного органа срабатывает датчик 112 и на четвертый вход модуля 105 приходит сигнал логического нуля. На выходах третьего элемента «ИЛИ» 120 и второго элемента «И» 118 устанавливаются логические нули, силовой управляющий элемент 119 блокирует движения крана. В этом случае разрешена только операция подъема грузозахватного органа, когда от датчика 113 включения механизма подъема грузозахватного органа приходит разрешающий сигнал на пятый управляющий вход модуля 105 блокировки движений. При этом на выходе третьего элемента «ИЛИ» 120 и выходе второго элемента «И» 118 устанавливаются сигналы логической единицы, включая силовой управляющий элемент 119.
Предлагаемая система безопасности крана стрелового типа может быть реализована промышленным способом с использованием современных электронных компонентов и технологий. В качестве блока защиты от опасного напряжения можно использовать модуль защиты от опасного напряжения (МЗОН) ЛГФИ.411117.002 прибора ОНК-140, серийно выпускаемого ОАО «АПЗ» (г. Арзамас), либо антенный модуль прибора «Барьер», выпускаемый ЗАО ИТЦ «КРОС» (г. Ивантеевка). Контроллер оголовка стрелы и управляющий контроллер могут быть выполнены на основе, например, микросхем контроллера MSP430F149 фирмы Texas Instruments (США). При использовании беспроводного канала обмена информацией между ними конструкцию контроллеров необходимо дополнить беспроводными приемопередатчиками, например беспроводными асинхронными последовательными приемопередатчиками Dolphin той же фирмы, включающими многодиапазонный радиопередатчик TRF6903 и специализированную микросхему DBB03. В качестве датчика максимальной высоты подъема крюка и датчика включения механизма опускания грузозахватного органа можно использовать контактные или бесконтактные концевые выключатели, например бесконтактные выключатели ВБ2.40.ХХ.12.1.1 ЗАО «МЕГА-К» (г. Калуга). В случае организации беспроводной связи датчиков с контроллером можно использовать беспроводные А2В выключатели фирмы Wylie Systems. Логическая часть модуля блокировки движений может быть реализована на реле и выключателях, установленных на кране, либо на элементах жесткой логики, либо программным путем при конструктивном совмещении модуля блокировки движений с управляющим контроллером. В качестве силового управляющего элемента могут использоваться, например, транзисторные ключи, твердотельные или электромагнитные реле. В качестве модуля аварийной сигнализации можно использовать плату модуля индикации блока обработки данных прибора ОНК-140. Датчики параметров оборудования, установленного на оголовке стрелы, - это серийно выпускаемые датчики усилия, скорости ветра, угла, освещенности и т.д. Модуль включения исполнительных устройств навесного оборудования стрелы крана представляет собой набор электронных ключей или реле. Исполнительные устройства могут включать электроуправляемые гидрораспределители, приборы освещения и т.д., а органы управления - это кнопки, выключатели кранового электрооборудования.
Специалисту в данной области техники должно быть очевидным, что в настоящем изобретении возможны разнообразные модификации и изменения. Соответственно, предполагается, что настоящее изобретение охватывает указанные модификации и изменения, а также их эквиваленты без отступления от сущности и объема изобретения, раскрытого в прилагаемой формуле изобретения.
Изобретение относится к подъемно-транспортному машиностроению и может быть использовано в системах управления и защиты грузоподъемных кранов стрелового типа. Система содержит управляющий контроллер, к выходам которого подключены вход модуля аварийной сигнализации и первый управляющий вход модуля блокировки движений, блок защиты от опасного напряжения и датчик максимальной высоты грузозахватного органа, выход которого подключен к информационному входу управляющего контроллера. Система снабжена контроллером оголовка стрелы и датчиком включения механизма опускания грузозахватного органа, а модуль блокировки движений имеет второй и третий управляющие входы. Контроллер оголовка стрелы соединен двухсторонней линией связи с блоком защиты от опасного напряжения и связан с управляющим контроллером двухсторонним проводным или беспроводным каналом обмена данными, а ко второму и третьему управляющим входам модуля блокировки движений подключены соответственно датчик максимальной высоты подъема грузозахватного органа и датчик включения механизма опускания грузозахватного органа. Технический результат заключается в повышении безопасности работы крана в нештатных ситуациях за счет сохранения функции ограничения максимальной высоты подъема крюка при блокировании функции отключения движений крана управляющим контроллером. 7 з.п. ф-лы, 4 ил.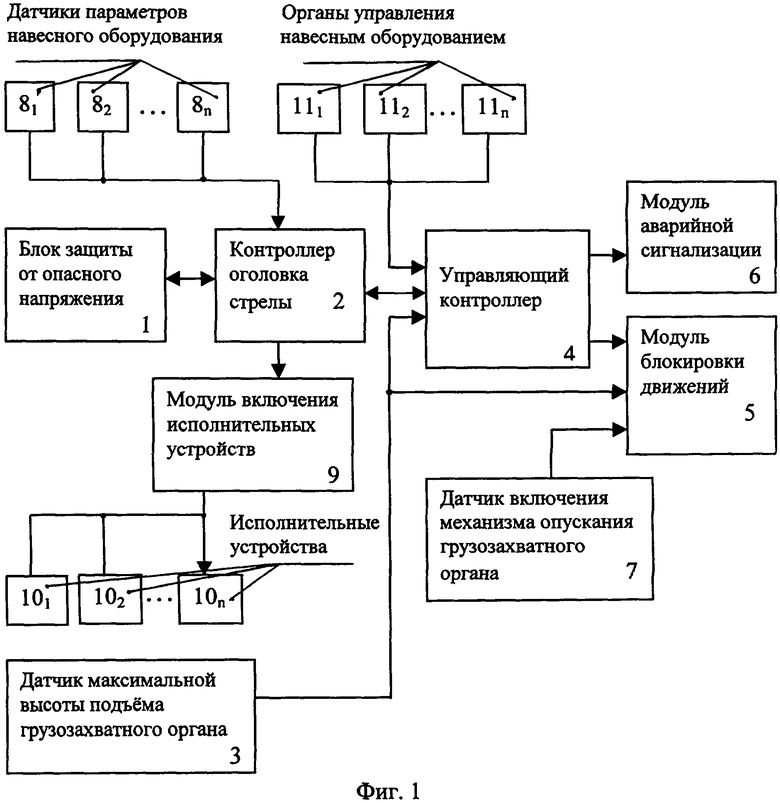
| СПОСОБ УПРАВЛЕНИЯ ГРУЗОПОДЪЕМНЫМ СТРЕЛОВЫМ КРАНОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2242420C2 |
| УСТРОЙСТВО БЕЗОПАСНОСТИ ГРУЗОПОДЪЕМНОГО КРАНА | 1999 |
|
RU2151732C1 |
| СПОСОБ УПРАВЛЕНИЯ ГРУЗОПОДЪЕМНЫМ КРАНОМ И УСТРОЙСТВО ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2003 |
|
RU2245837C1 |
| СПОСОБ ОБМЕНА ИНФОРМАЦИЕЙ МЕЖДУ МОДУЛЯМИ СИСТЕМЫ БЕЗОПАСНОСТИ ГРУЗОПОДЪЕМНОГО КРАНА И СИСТЕМА БЕЗОПАСНОСТИ ГРУЗОПОДЪЕМНОГО КРАНА | 2002 |
|
RU2251524C2 |
| СПОСОБ ОГРАНИЧЕНИЯ ПАРАМЕТРОВ РАБОТЫ УСТРОЙСТВА | 2003 |
|
RU2255894C2 |
| US 5730305 A, 24.03.1998. | |||

