1
Изобретение относится к области пневматического приборостроения.
Известны пневматические регуляторы переменной структуры, содержащие статическое регулирующее устройство с переключаемыми параметрами, устройство переключения и логическое устройство для формирования функции переключения, состоящее из сигнализатора знака производной и сигнализатора отклонения, выходы которых объединены логической схемой «равнозначность. Во многих случаях, например, при стабилизации загрузки последовательно работающих агрегатов, в качестве сигнала ощибки целесообразно использовать отклонение регулируемой величины за пределы настраиваемой зоны нечувствительности.
Известные регуляторы не обеспечивают решения этой задачи, так как при движении внутри зоны нечувствительности выход регулятора не остается постоянным из-за неизбежного дрейфа элементов регулирующего устройства
Целью изобретения является повыщение точности пневматических регуляторов переме-ННой структуры.
Эта цель достигнута благодаря тому, что в предложенном регуляторе логическое устройство содержит трех.мембранное реле, сопла которого соединены с выходом логического
устройства, а сигнализатор отклонения содержит сигнализаторы верхнего и нижнего отклонений, выход первого из которых подключен к управляющей камере трехмембранного реле, выход второго с одним из входов схемы равнозначности и сопловой камерой трехмембранного реле, вторая сопловая камера которого подключена к выходу схемы равнозначности.
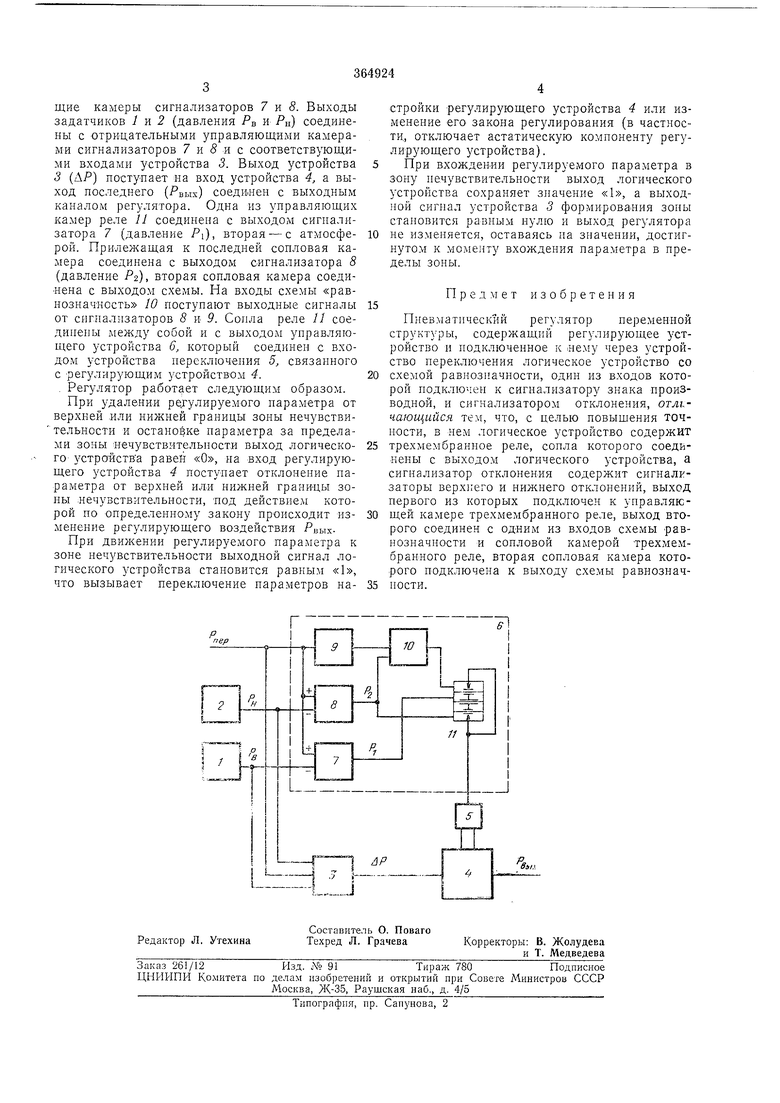
На чертел е приведена принципиальная схема регулятора.
Регулятор состоит из задатчиков верхней / и нижней 2 границ зоны нечувствительности, вычислительного устройства 3 для формирования зоны нечувствительности, регулирующего устройства 4 для реализации стандартного закона, устройства 5 переключения параметров настройки или закона регулирования и логического устройства б, управляющего последним и состоящего из сигнализатора 7 и 8 отклонения параметра соответственно за верхнюю и нижнюю границу зоны нечувствительности (сигнализаторы верхнего и нижнего выбегов), сигнализатора 9 знака производной регулируемого параметра, логической схемы «равнозначность 10 и трехмембранного двухконтактного реле //.
Сигнал от датчика параметра Рпе.р подается на один пз входов устройства 5, на вход сигнализатора 9 и в положительные управляющие камеры сигнализаторов 7 и 5. Выходы задатчиков 1 я 2 (давления Рв и Рц) соединены с отрицательными управляющими камерами сигнализаторов 7 и 5 и с соответствующими входами устройства 3. Выход устройства 3 (А/) поступает на вход устройства 4, а выход последнего (Рвых) соединен с выходным каналом регулятора. Одна из управляющих камер реле 11 соединена с выходом сигнализатора 7 (давление PI), вторая - с атмосферой. Прилежащая к последней сопловая камера соединена с выходом сигнализатора 8 (давление Pz), вторая сопловая камера соединена с выходом схемы. На входы схемы «равнозначность 10 поступают выходные сигналы от сигнализаторов 8 и 9. Сопла реле 11 соединены мел-еду собой и с выходом управляющего устройства 6, который соединен с входом устройства переключения 5, связанного с регулирующим устройством 4. . Регулятор работает следующим образом.
При удалении регулируемого параметра от верхней .или нижней границы зоны нечувствительности и остановке параметра за пределами зоны нечувствительпости выход логического устройства равен «О, на вход регулирующего устройства 4 поступает отклонепие параметра от верхней или нижней грани-цы зоны нечувствительности, нод действием которой по определеппому закону происходит изменение регулирующего воздействия РВЫХПри движении регулируемого параметра к зоне нечувствительности выходной сигнал логического устройства становится равным «1, что вызывает переключение параметров настройки регулирующего устройства 4 или изменение его закона регулирования (в частности., отключает астатическую компоненту регулирующего устройства).
При вхождении регулируемого параметра в зону печувствительности выход логического устройства сохраняет значение «1, а выходной сигнал устройства 3 формирования зоны становится равным пулю и выход регулятора
не изменяется, оставаясь па значении, достигнутом к моменту вхождения параметра в пределы зоны.
Предмет изобретения
Пневматический регулятор переменной структуры, содержащий регулирующее устройство и подключенное к нему через устройство переключения логическое устройство со
схемой равнозначпости, один из входов которой подключен к сигнализатору знака производной, и сигнализатором отклонения, отличающийся тем, что, с целью повышения точности, в нем логическое устройство содержит
трехмембранное реле, сопла которого соединены с выходом логического устройства, а сигнализатор отклонения содержит сигнализаторы верхнего и нижнего отклонений, выход первого из которых подключен к управляющей камере трехмембранного реле, выход второго соединен с одним из входов схемы равнозначности и сопловой камерой трехмембранного реле, вторая сопловая камера которого подключена к выходу схемы равнозначности.
71
| название | год | авторы | номер документа |
|---|---|---|---|
| Пневматический регулятор переменной структуры | 1975 |
|
SU542170A1 |
| Пневматический регулятор с переменнойСТРуКТуРОй | 1979 |
|
SU851337A1 |
| Пневматический двухпозиционный регулятор | 1976 |
|
SU623180A1 |
| РЕГУЛЯТОР С ПЕРЕМЕННОЙ СТРУКТУРОЙ | 2000 |
|
RU2161326C1 |
| Пневматический регулятор с переменной структурой | 1978 |
|
SU718834A1 |
| Пневматический регулятор с переменной структурой | 1978 |
|
SU748345A1 |
| Формирователь вункции переключения для пневматических регуляторов с переменной структурой | 1976 |
|
SU690441A1 |
| Пневматический пропорционально-интегрально-дифференциальный регулятор | 1982 |
|
SU1043587A1 |
| ПНЕВМАТИЧЕСКИЙ РЕГУЛЯТОР | 1973 |
|
SU363071A1 |
| Пневматический импульсный регулятор | 1973 |
|
SU468221A1 |
