1
Изобретение относится к области грузоподъемного оборудования, а именно к канатоукладчикам лебедок.
Для упорядоченной укладки каната на барабаи надо, чтобы канат приходил на лебедку перпендикулярно барабану. Для этого применяются канатоукладчики различных конструкций.
Известен канатоукладчик, содержащий канатонаправляюш,ий орган, выполненный в виде двух зажимиых шкивов, в который запасован замкнутый в кольцо трос, одна ветвь которого закреплена на каретке. Однако такой «аиатоукладчик сложен по конструкции и имеет низкую эффективность в работе, в результате чего канат быстро выходит из строя.
Более близким прототипом является канатоукладчик, содержащий двуплечий рычаг, одно плечо которого посредством роликов взаимодействует с подвижной ветвью каната, идущей на барабан лебедки. Другое плечо рычага связа/но со штангой, воздействующей на механизм управления устройством ориентации платформы лебедки, обеснечивающим поворот платформы вокруг вертикальной оси на угол, равный углу отклонения каната при намотке, т. е. устройство поворачивает лебедку, чтобы обеспечить положение барабана перпендикулярно направлению каната.
Известный канатоукладчик также имеет сложную конструкцию.
Цель изобретения - упрощение конструкции канатоукладчика. Для достижения поставленной цели другое плечо рычага соединено с неподвижной ветвью каната полиспаста, а длины плеч связаны между собой соотношением: L P.sln-f
Т
R-slna
где L и / - длины плеч рычага;
R - равнодействующая усилнй в подвижной ветви каната, идущей на барабан;
Р - усилие в неподвижной ветви каната;а - угол между равнодействующей
R и плечом рычага; Y -угол между усилием Р и другим плечом рычага,
причем плечи рычага взаимно расположены так, что . когда R 0 и канат подходит перпендикулярно к барабану без перегиба на роликах.
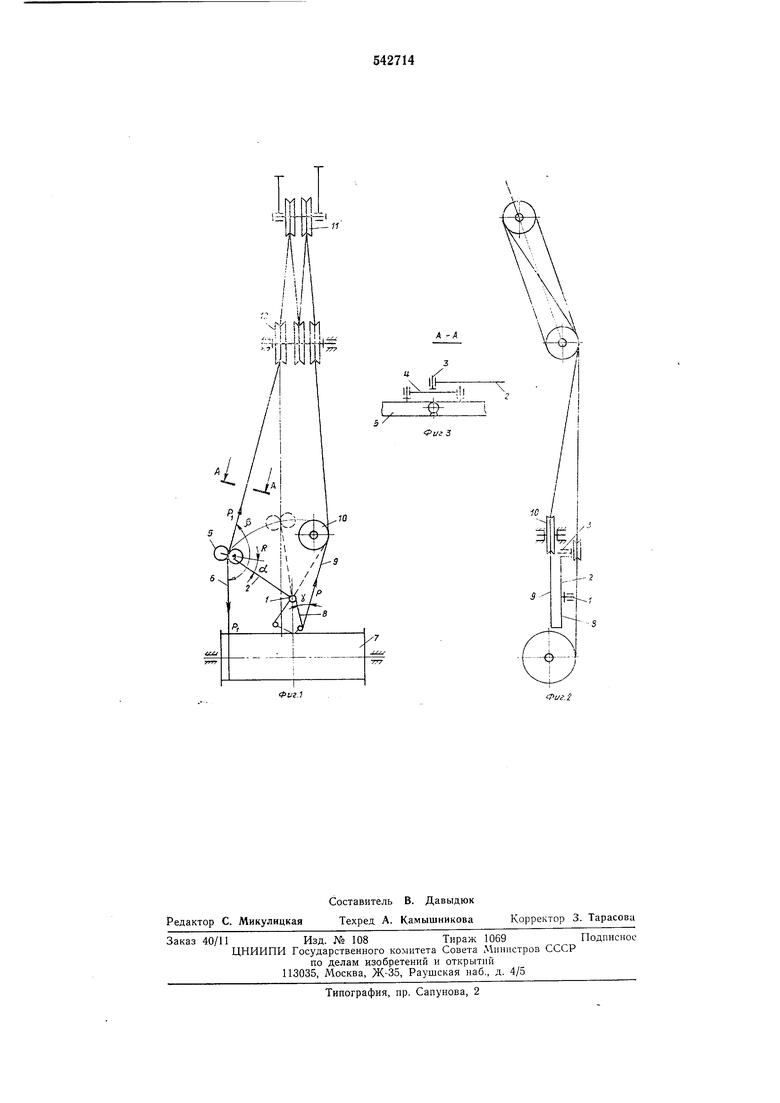
На фиг. 1 показан схематично предлагаемый канатоукладчик, вид сверху; на фиг. 2 - то же, вид сбоку; на фиг. 3 - разрез по А-А на фиг. 1.
Канатоукладчик содержит двуилечий рычаг, закрепленный поворотно на оси 1. На
большем плече 2 рычага установлена на оси 3 обойма 4, несущая ролики 5, посредством которых плечо взаимодействует с подвижной ветвью 6 каната полиспаста, идущей «а барабан 7. На коице меньшего плеча 8 рычага закреплена неподвижная ветвь 9 каната полиспаста, огибающая неподвижный блок 10. Ось 1 двуплечего рычага предпочтительно размещать в поперечной плоскости симметрии барабана. Длины плеч рычага связаны между собой следующим соотнощением:
л P-sinj
/ R-sina
где L и I - длины соответственно большего
и меньш его плеч рычага; К - равнодействующая усилий в подвижной ветви каната, возникающая прн перегибе его на роликах рычага;
Р - усилие в неподвижной ветви каната;а - угол между равнодействующей
Я и большим плечом рычага; Y -угол между усилием Р и меньщим плечом рычага.
При этом длину L большего плеча 2 следует выбирать больше половины длины барабана 7. Плечи 2 и 8 рычага по отношению друг к другу расположены так, что когда подвижная ветвь 6 каната идет па барабан перпендикулярно без перегиба «а роликах 5 (т. е. 0), нлечо 8 должно совпадать с направлением неподвижной ветви 9 каната, т. е. угол 0 (на фиг. 1 это полол енпе показано пунктиром).
Канатоукладчик работает следующим образом.
Неподвижная ветвь 9 каната огибает неподвижный отводной блок 10, проходит через систему блоков 11 и с отклоняющего блока 12, пройдя между направляющими роликами 5, .наматывается на барабан 7. Неподвижная ветвь каната нагружена усилием Р, под действием которого рычаг поворачивается вокруг оси 1. Ролики 5 воздействуют на нагруженную усилием Р подвижную ветвь 6 каната и изгибают ее до тех пор, пока момент от равнодействующей R на рычаге не уравновесит момент от усилия Р, а подвижная ветвь не окажется перпендикулярной к образуюп ей
бараба.на. Усилие PI больше усилия Р на величину, необходимую для преодоления силы трения в блоках полиспаста. Во время намоткн подвижная ветвь каната воздействует на направляющие ролики 5 и отклоняет плечо 2 в сторону намотки каната. При этом угол изгиба Р подвижной ветви меняется, что влечет за собой изменение значения равнодействующей R и, следовательно, изменение ее момента. Одновременно с поворотом плеча 2 поворачивается и плечо 8, что влечет за собой изменение момента от усилия Р. Изменения моментов пропорциональны, так что они постоянно взаимно уравновешиваются. Колебания каната гасятся в направляющих роликах 5. Осевой шарнир 3 позволяет обойме 4 свободно устанавливаться по канату. В момент, когда подвижная ветвь каната направляется на барабан по нормали к его образующей без изгиба на канатонаправляющих роликах, продольная ось меньшего плеча 8 устанавливается параллельно оси неподвижной ветви 9 каната. Усилие Р при этом нересекает ось 1 рычага и момент оказывается равным нулю.
Формула изобретения
Канатоукладчик, содержащий двуплечий рычаг, на одном из плеч которого смонтированы ролики, охватывающие подвижную ветвь каната, наматываемого на барабан, отличающийся тем, что, с целью упрощения конбтрукции канатоукладчика, другое плечо рычага соединено с неподвижной ветвью каната, а длины плеч рычага связаны между собой следующим соотношением:
P-siai
Slna
е L и / - длины плеч рычага;
Р - усилие в неподвижной ветви каната;
R - равнодействующая усилий в подвижной ветви каната, идущей на барабан;
Y - угол между усилием Р и плечом рычага;
а - угол между равнодействующей R н плечом рычага.
| название | год | авторы | номер документа |
|---|---|---|---|
| КАНАТОУКЛАДЧИК ДЛЯ ЛЕБЕДОК | 2001 |
|
RU2209176C2 |
| Крановый захват-кантователь | 1978 |
|
SU779270A1 |
| Устройство для натяжения ленты конвейера | 1987 |
|
SU1512880A1 |
| КАНАТОУКЛАДЧИК ДЛЯ ЛЕБЕДОК (ВАРИАНТЫ) | 1994 |
|
RU2083451C1 |
| КАНАТОУКЛАДЧИК ДЛЯ ЛЕБЕДОК | 1996 |
|
RU2099277C1 |
| ДИФЕРЕНЦИАЛЬНАЯ ЛЕБЕДКА С ФРИКЦИОННЫМ БАРАБАНОМ | 1933 |
|
SU39368A1 |
| БЕЗОПАСНЫЙ КАНАТНЫЙ ПОЛИСПАСТ | 2004 |
|
RU2266860C1 |
| Грузоподъемное устройство | 1973 |
|
SU527371A1 |
| Канатоукладчик | 1976 |
|
SU596537A1 |
| Натяжное устройство тяговых органов конвейеров | 1989 |
|
SU1712272A1 |