(54) ПРИВОД ДЛЯ МИКРОПЕРЕМЕШЕНИЙ
| название | год | авторы | номер документа |
|---|---|---|---|
| Шпиндельная головка для обработки пазов | 1981 |
|
SU956177A1 |
| Гидростатическая опора | 1985 |
|
SU1291745A1 |
| Радиальная гидростатическая опора шпиндельного узла | 1984 |
|
SU1175610A1 |
| Устройство для адаптивнойпОдНАСТРОйКи СиСТЕМы Спид | 1979 |
|
SU831508A1 |
| Регулятор давления для замкнутой гидростатической опоры | 1979 |
|
SU1059555A1 |
| Шпиндельный узел | 1981 |
|
SU966330A1 |
| Шпиндель многоцелевого станка | 1980 |
|
SU944861A1 |
| Устройство для автоматического управления толщиной смазочного слоя в незамкнутой гидростатической опоре | 1973 |
|
SU752067A1 |
| Гидростатическая опора | 1991 |
|
SU1784772A1 |
| ГИДРОСТАТИЧЕСКИЙ ПОДШИПНИК | 2001 |
|
RU2208723C2 |
Изобретение касается объемных гидроприводов, в частности гидростатических опор, и может найти применение, например, в станкостроении в качестве шпиндельного подшипника станка, одновременно выполняющего функцию подшипника и привода радиальных микроперемещений для планетарного или осциллирующего фрезерования пазов, для шлифования отверстий малого диаметра с планетарным движением инструмента.
Известны гидростатические опоры, содержащие каналы для подачи рабочей жидкости в зазор между подвижной и непоцвижной деталями.
Недостатком таких опор является отсутствие возможности управления положением подвижной детали относительно корпуса опоры.
Известен также привод для микроперемеш ний, вьтолненный в виде гидростатического подшипника, на входе в противоположные несущие карманы которого установлены управляемые гидравлические сопротивления, вьтолненные в виде двухкаскадного мембранного усилителя, в котором установлены
две мембраны, образующие с одной стороны с соплами второго каскада два управляемых гидравлических сопротивления, связанных на входе с источником давления, и на вьходе с двумя противоположными несущими карманами, а с другой стороны - две полости управления первого каскада усилителя.
Полости управления первого каскада усилителя связаны на входе с источником даЕз- Ленин через дросселирующие отверстия, а на выходе - с устройством типа сопло-заслонка, заслонка которого связана с якорем электромеханического преобразователя. При колебании заслонки вал в подшипнике получает осциллируюш;ее движение. Этот привод наиболее близок к предложенному по технической сущности.
Недостатком этого привода является отсутствие возможности получения планетарного движения.
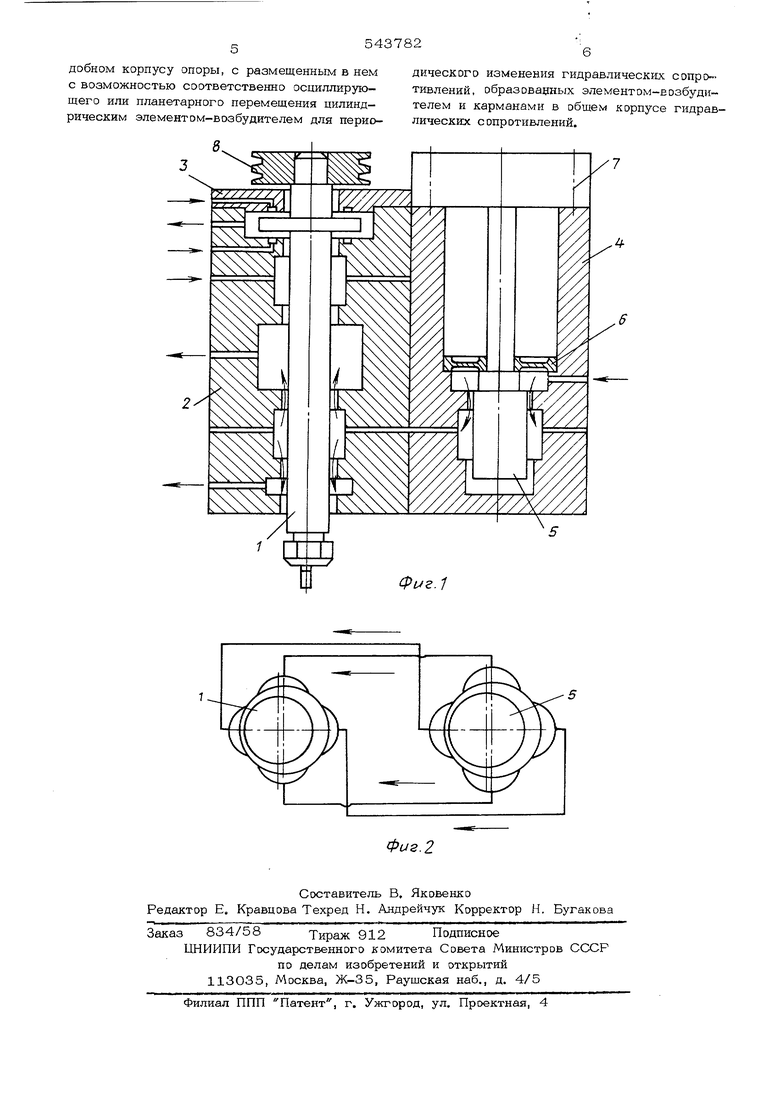
Целью изобретения является получение радиальных перемещений подвижного выходного элемента с помощью одного и того же привода для микроперемешений. Это достигается тем, что в предложенном приводе корпус опоры и подвижный выходной элемент выполнены цилиндрическими, а управляемые гидравлические сопротив ления объединены в общем корпусе, геометрически подобном корпусу опоры. В корпусе управляемых гидравлических сопротивлений размещен с возможностью соответственно о циллирующего или планетарного перемещения цилиндрический элемент-возбудитель для периодического изменения гидравлических сопротивлений, образованных элeмeнтovI-вoз будителем и карманами в общем корпусе гид равлических сопротивлений. На фиг. 1 показан привод для микропере мешений, поперечный разрез; на фиг, 2 схема соединения карманов опоры с карманами гидравлических сопротивлений. Подвижный выходной элемент 1 выполнен цилиндрическим и расположен в двух упорньх и двух радиальных гидростатических подшипник.ах, выполненных в корпусе 2 и крышке 3. Управляемые гидравлические сопротивления объединены в общем корпусе 4 геометрически подобном корпусу 2 Корпус 4 расположен на корпусе 2 ляемые гидравлические сопротивления образованы отверстием в корпусе 4, в котором выполнены кармань, соединенные с соответствутащими карманами нижнего радиального подшипника выходного элемента и шейкой элемента-возбудителя 5, который, подвешен на упругой мембране 6 в корпусе 4. Мембрана 6 позволяет совершать концам элемента-возбудителя 5 качательное или вращател ное движение. Верхний конец злемента-возбудителя о соединен приводом 7, установленном на кор пусе 4, Привод 7 может быть, нагфкмер, м ханическим, электромагнитным, он служит для задания закона перемеиЕез1ИЯ элементавозбудителя 5 в отверстии корпуса 4. На верхний конец элемента 1 насажен шкив 6 для сообщения ему вращения относи тельно оси, а нижний конец служит, например, для крепления режущего инструмента. Смазка от источника давления подается к упорным и верхнему радиальному подшипникам через дросселирующие отверстия в корпусе 2, к нижнему радиальному подшипнику выходного элемента через управляемы гидравлические сопротивления, в которые поступает из полости под мембраной и дросселируется через щели между шейкой элемента-возбудителя 5 и отверстием в кор пусе 4, попадая в карманы, соединенные с соответствующими карманами подшипника вы ходного элемента 1. Из карманов подшипников смазка через щели между отверстиями в корпусе 2 и шейкой выходного элемен та 1 дросселируется на слив При смещении щейки элемента-возбудителя 5 в отверстии с карманами в корпусе 4 от нулевого положения, при котором шейка элемента-возбудителя в отверстии корпуса 4 расположена концентрично, щели - гидравлические сопротивления на входе в карманы изменяются, изменяя соотношение расходов смазки через гидравлические сопротивления и через соответствующие карманы гидростатического подшипника выходного элемента 1, Давление смазки в карманах подшипника жестко центрирует выходной элемент 1 в отверстие корпуса 2. Выходной элемент 1 расположен с эксцентриситетом, направленным в сторону карманов с наименьшим расходом смазки. Величина этого эксцентриситета изменяется в пределах зазора в подшипнике выходного элемента и зависит от соотношения расходов смазки через карманы подшипника выходного элемента 1, а следовательно, от положения шейки элемента-возбудителя 5 в отверстии с карманами корпуса 4. Для сообщения вькходному элементу 1 планетарного движения необходимо заставить его вращаться относительно собственной оси с помощью шкива 8, что суммируется с обрашештем оси выходного элемента по орбите. Это обращение выходной элемент 1 получает при обращении по орбите верхнего конца элемента-возбудителя 5 с помощью привода 7. Радиус орбиты, по которой обращается выходной элемент 1, прямо пропорционален радиусу орбиты, по которой обращается верхний конец элементавозбудителя. Для сообщения выходному элементу 1 осциллирующего движения необходимо задать качательное движение верхнему концу элемента-возбудителя 5 с помощью привода 7. Величина перемещений выходного элемента 1 прямо пропорциональна величине качания верхнего конца элемента-возбудителя 5. Формула изобретения ПРИВОД для микроперемещений, выполнен ны.й в виде замкнутой гидростатической опоры, содержащей корпус с несущими карманами, размещенный в нем подвижный выходной элемент щэивода и управляемые гидравлические сопротивления, установленные на входе в карманы, отличающийся тем, что, с целью получе1шя осциллирующих и планетарных перемещений выходного элемента, корпус опоры и подвижный выходной элемент вьшолнены цилиндрическими, а управляемые гидравлические сопротивления объединены в общем корпусе, герметически подобном корпусу опоры, с размещенным в нем с возможностью соответственно осциллирующего или планетарного перемещения цилиндрическим элементом-возбудителем для периоФиг.1 дического изменения гидравлических сопро j тивлений, образовацных элементом-возбудителем и карманами в общем корпусе гидравлических сопротивлений.
