взаимодействии с соответствующими, жестко закрепленными рядами электромагнитов, якорными шинами 11-14, причем для прямого пути включаются ряды электромагнитов 7 и 5, а для бокового ответвления 6 и 8, и каждый другой ряд электромагнитов выключается при входе в ответвление.
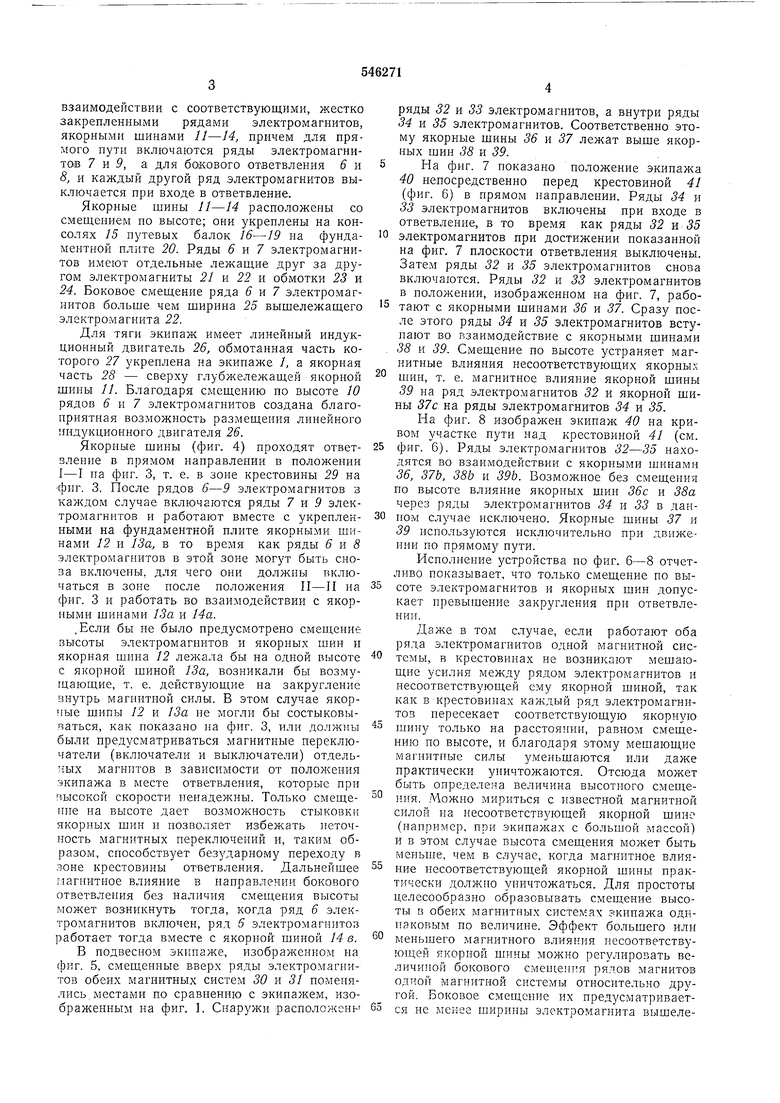
Якорные шины //-14 расположены со смешением но высоте; они укреплены на консолях 15 путевых балок 16-19 на фундаментной нлнте 20. Ряды 6 w. 7 электромагнитов имеют отдельные лежашие друг за другом электромагниты 21 и 22 и обмотки 23 и 24. Боковое смешение ряда 5 и 7 электромагнитов больше чем ширина 25 вышележаш,его электромагнита 22.
Для тяги экипаж имеет линейный индукционный двигатель 26, обмотанная часть которого 27 укреплена на экипаже /, а якорная часть 28 - сверху глубжележашей якорной шииы //. Благодаря смещению но высоте 10 рядов 6 и 7 электромагнитов создана благоприятная возможность размещения линейного индукционного двигателя 26.
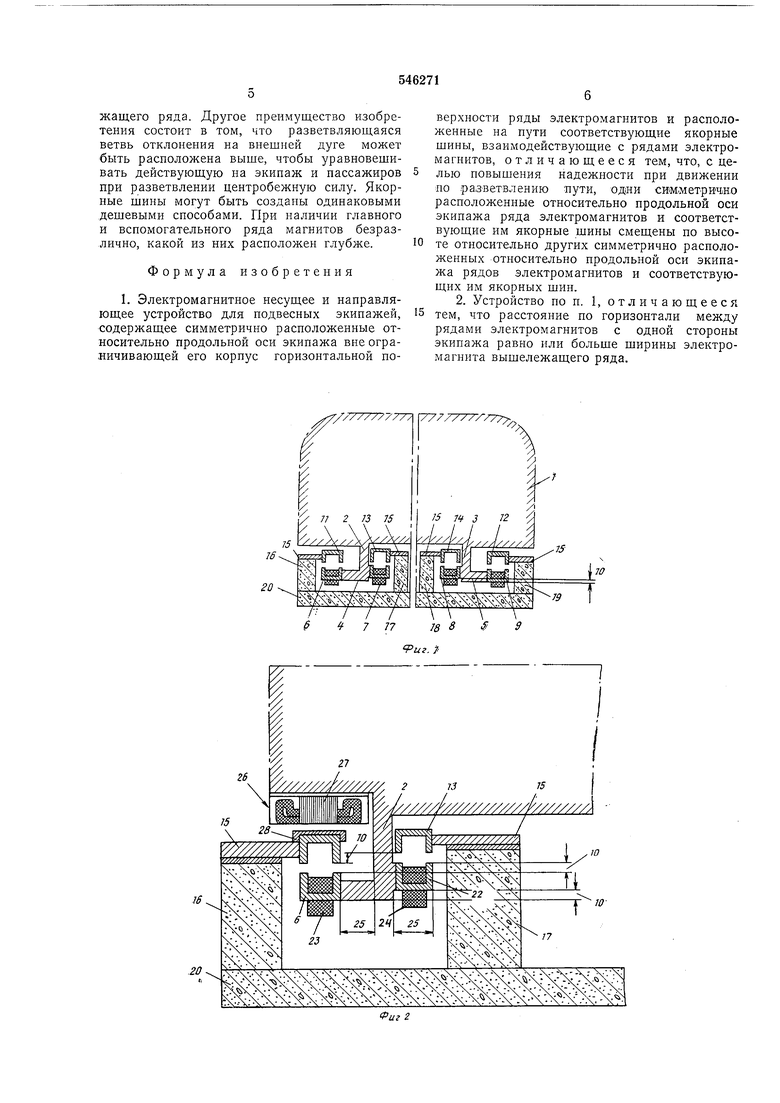
Якорные шины (фиг. 4) проходят ответвление в прямом направлении в положении I-I на фнг. 3, т. е. в зоне крестовины 29 на фиг. 3. После рядов 6-9 электромагнитов з каждом случае включаются ряды 7 и 9 электромагнитов и работают вместе с укрепленными на фундаментной нлите якорными шинами 12 и 13а, в то время как ряды & и S электромагнитов в этой зоне могут быть снова включены, для чего они должны включаться Б зоне после положения II-II на фиг. 3 и работать во взаимодействии с якорными шинами 13а и 14а.
.Если бы не было предусмотрено смен1,ение высоты электромагнитов и якорных шин и якорная шнна 12 лежала бы на одной высоте с якорной шиной 13а, возникали бы возмущающие, т. е. действующие на закругление внутрь магнитной силы. В этом случае якорные шипы 12 и 13а не могли бы состыковываться, как показано на фиг. 3, или должны были предусматриваться магнитные переключатели (включатели и выключатели) отдельных магнитов в зависимости от положения экипажа в месте ответвления, которые при высокой скорости ненадежны. Только смещение на высоте дает возможность стыковки якорных шин и позволяет избежать неточность магнитных переключений и, таким образом, способствует безлдарному переходу в зоне крестовины ответвления. Дальнейшее магнитное влияние в направлении бокового ответвлеиия без наличия смещения высоты может возникнуть тогда, когда ряд 6 электромагнитов включен, ряд 5 электромагнитов работает тогда вместе с якорной шиной 14 в.
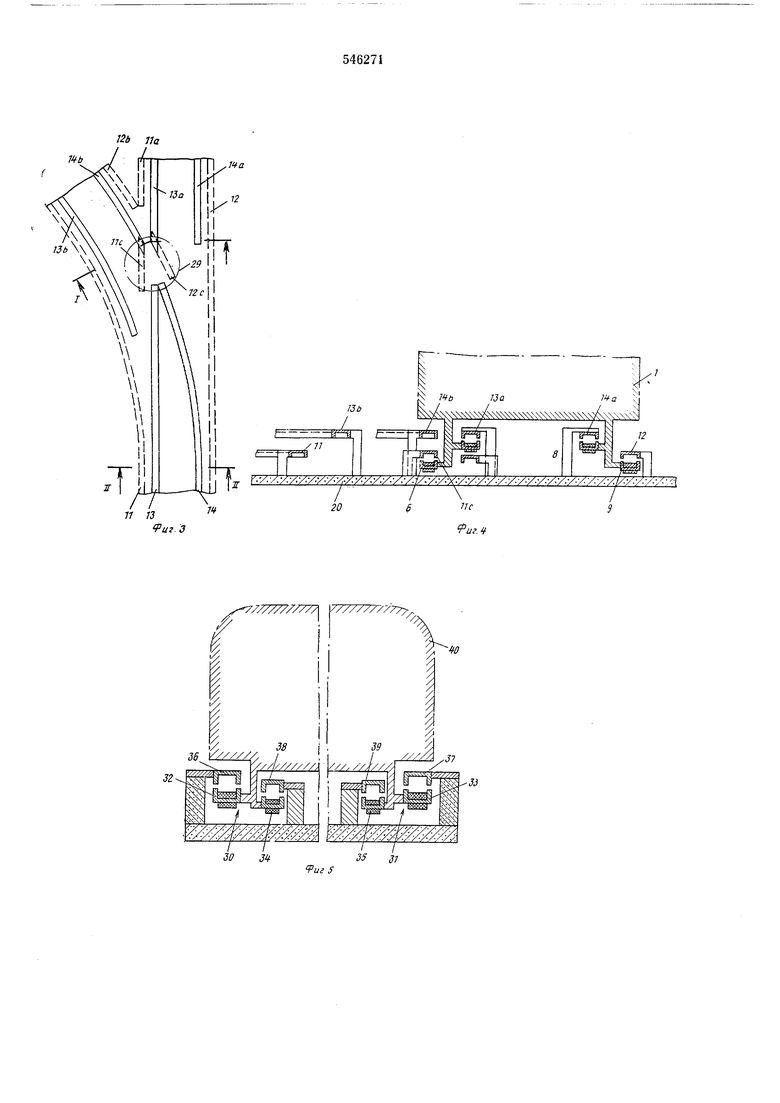
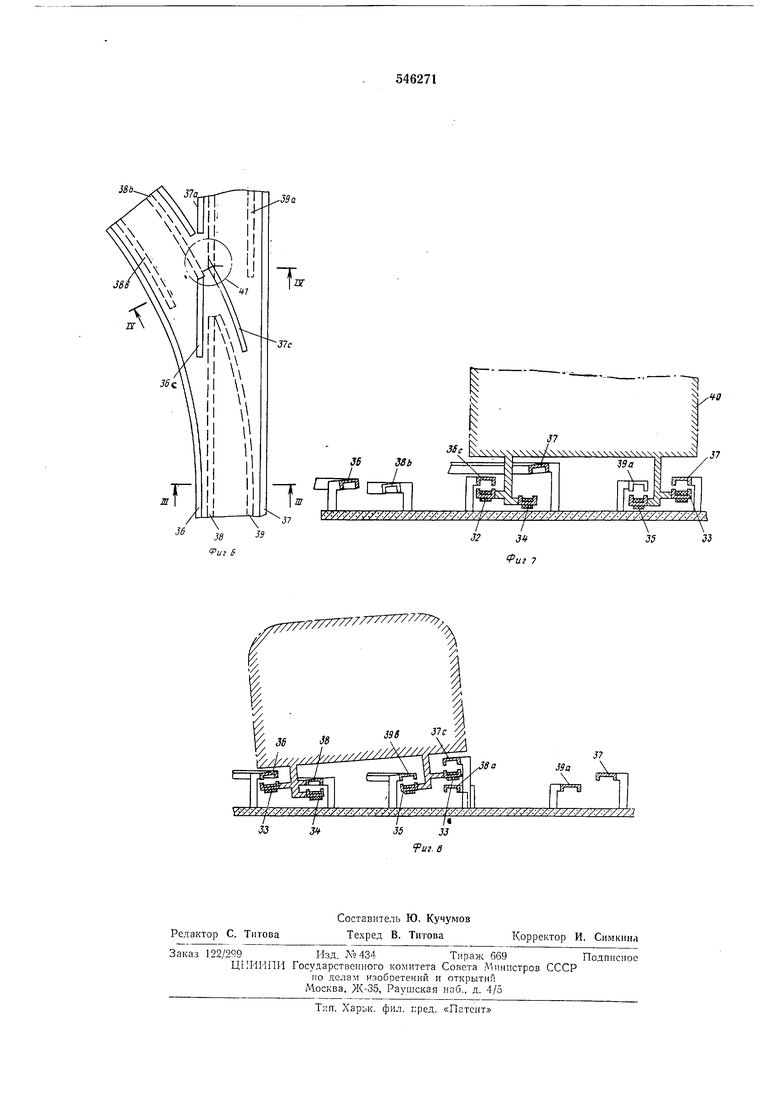
В подвесном экипаже, изображенном на фиг. 5, смещенные вверх ряды электромагнитов обеих магнитных систем 30 и 31 поменялись, местами по сравнению с экипажем, изображенным на фиг. . Снаружи расположенн
ряды 32 и 33 электромагнитов, а внутри ряды 34 и 35 электромагнитов. Соответственно этому якорные шины 36 и 37 лежат выше якорных шин 38 и 39.
SНа фиг. 7 показано положенне экинажа
40 непосредственно перед крестовиной 41 (фиг. 6) в прямом иаправлении. Ряды 34 и 33 электромагнитов включены при входе в ответвление, в то время как ряды 32 и 35
0 электромагнитов при достижении показанной на фиг. 7 плоскости ответвления выключены. Затем ряды 32 и 35 электромагнитов снова включаются. Ряды 32 и 33 электромагнитов в положении, изображенном на фиг. 7, рабо15 тают с якорными шинами 36 и 37. Сразу после этого ряды 34 и 35 электромагнитов вступают во взаимодействие с якорными шинами . 38 и 39. Смешение по высоте устраняет магнитные влияния несоответствующих якорных
шин, т. е. магнитиое влияние якорной шины 39 на ряд электромагнитов 32 и якорной шины 57с на ряды электромагнитов 34 и 35.
На фиг. 8 изображен экипаж 40 на кривом участке пути над крестовиной 41 (см.
5 фиг. 6). Ряды электромагнитов 32-35 находятся во взаимодействии с якорными шинами 36, 37Ь, ЗЗЬ и 39Ь. Возможное без смещения по высоте влияние якорных шин 36с и ЗЗа через ряды электромагнитов 34 и 33 в данном случае исключено. Якорные шины 37 и 39 используются исключительно при движеиии по прямому пути.
Исполнение устройства по фиг. 6-8 отчетливо показывает, что только смещение но высоте электромагнитов и якорных шин допускает превышение закругления при ответвлении.
Даже в том случае, если работают оба ряда электромагнитов одной магнитной системы, в крестовинах не возникают мешающие усилия между рядом электромагнитов и несоответствующей ему якорной шиной, так как в крестовинах каждый ряд электромагнитов нересекает соответствующую якорную
5 шину только на расстоянии, равном смещению по высоте, и благодаря этому мешающие магнитные силы уменьшаются или даже практически уиичтожаются. Отсюда может быть определена величина высотиого CMenie0 ия. Д1ожно мириться с известной магнитной силой на несоответствующей якорной шине (например, при экипажах с большой массой) и в этом случае высота смещения может быть меньше, чем в случае, когда магнитное влияние несоответствующей якорной шины практически должна уничтожаться. Для простоты целесообразно образовывать смещение высоты в обеих магнитных системах зкинажа одинаковым но величиие. Эффект большего или
0 менынего магнитного влияния иесоответствуюндей якорной шины можно регулировать величиной бокового смен1ения рядов магнитов одной магнитной системы относительно другой. Боковое смещение их предусматривает5 ся не менее ширины электромагнита вышележащего ряда. Другое преимущество изобретения состоит в том, что разветвляющаяся ветвь отклонения на внешней дуге может быть расположена выще, чтобы уравновешивать действующую на экипаж и пассажиров при разветвлении центробежную силу. Якорные шины могут быть созданы одинаковыми дешевыми способами. При наличии главного и вспомогательного ряда магнитов безразлично, какой из них расположен глубже. Формула изобретения 1. Электромагнитное несущее и направляющее устройство для подвесных экипажей, содержащее симметрично расположенные относительно продольной оси экипажа вне ограничивающей его корпус горизонтальной поверхности ряды электромагнитов и расположенные на пути соответствующие якорные шины, взаимодействующие с рядами электромагнитов, отличающееся тем, что, с целью повышения надежности при движении по разветвлению пути, одни свмметричао расположенные относительно продольной оси экипажа ряда электромагнитов и соответствующие им якорные шины смещены по высоте относительно других симметрично расположенных относительно продольной оси экипажа рядов электромагнитов и соответствующих им якорных щин. 2. Устройство по п. 1, отличающееся тем, что расстояние по горизонтали между рядами электромагнитов с одной стороны экипажа равно или больше ширины электромагнита вышележащего ряда.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электромагнитное несущее и направляющее устройство для подвесных экипажей | 1973 |
|
SU727124A3 |
| Электромагнитное несущее и направляющее устройство для подвесных экипажей | 1975 |
|
SU566514A3 |
| ТРАНСПОРТНОЕ УСТРОЙСТВО НА ЭЛЕКТРОМАГНИТНОЙ ПОДВЕСКЕ | 1982 |
|
SU1108670A1 |
| Транспортная система на магнитной подвеске | 1987 |
|
SU1431221A1 |
| УСТРОЙСТВА ДЛЯ ОРИЕНТАЦИИ МАГНИТНЫХ ИЛИ НАМАГНИЧИВАЮЩИХСЯ ЧАСТИЦ, МАШИНА И СПОСОБ ИЗГОТОВЛЕНИЯ ОПТИЧЕСКИ ВАРЬИРУЕМЫХ ЭЛЕМЕНТОВ ИЗОБРАЖЕНИЯ | 2019 |
|
RU2752130C1 |
| Программный электронный затвор фотоаппарата | 1987 |
|
SU1465861A1 |
| ПОРШНЕВОЙ КОМПРЕССОР С ЭЛЕКТРОДИНАМИЧЕСКИМ ПРИВОДОМ | 1989 |
|
RU2005912C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКИМ ЗАМКОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2021 |
|
RU2780996C1 |
| АТТРАКЦИОН САВИНОВСКОГО В.Г. | 2004 |
|
RU2264838C1 |
| НЕСУЩИЙ ВИНТ | 2005 |
|
RU2296697C1 |
%
27
1Г
18 S S 9
/////, 2
15
13
/J//////J////////////// //////// yj ,30 34W
