1
Изобретение относится к транспорной технике на магнитной подвеске.
Известно электромагнитное несущее и направляющее устройство для подзесных .экипажей, содержащее закрепленные на экипаже симметрично расположенные относительно его продольный оси вне ограничивающей корпус горизонтальной поверхности ряды электромагнитов и взаимодействующие с последними .расположенные на пути соответствующие якорные шины 1.
Конструкция этого устройства не предусматривает возможности прохождения разветвления пути.
Цель изобретения - расширение функциональных возможностей - обеспечение использования устройства на разветвлениях пути.
Цель достигается тем, что в описанном устройстве каждый ряд электромагнитов состоит из двух рядом расположенных групп электромагнитов
С целью уменьшения веса пары сменых электромагнитов различных групп могут быть выполнены с общей обмоткой возбуждения.
С целью повышения боковой стабилзации упомянутые пары смежных электромагнитов могут быть поочередно
сдвинуты в разные стороны относительно оси ряда.
В зоне передачи несущей и направляющей функций от электромагнитов одной группы к электромагнитам смежной группы якорнывшины, взаимодействующие с первой из упомянутых групп электромагнитов, могут быть выполнены отклоняющимися вверх из зоны взаимодействия, я якорные шины, вза-. имодействующие во второй из упомянутых групп электромагнитов - отклоняющимися вниз, в зону взаимодействи.я.
В зонах, где электромагниты смежных групп расположены на заданном расстоянии от соответствующих якорных шин, последние могут быть снабжены обмотками возбуждения намагничивающей силы, противоположной намагничивающей силе электромагнитов экипс1жа.
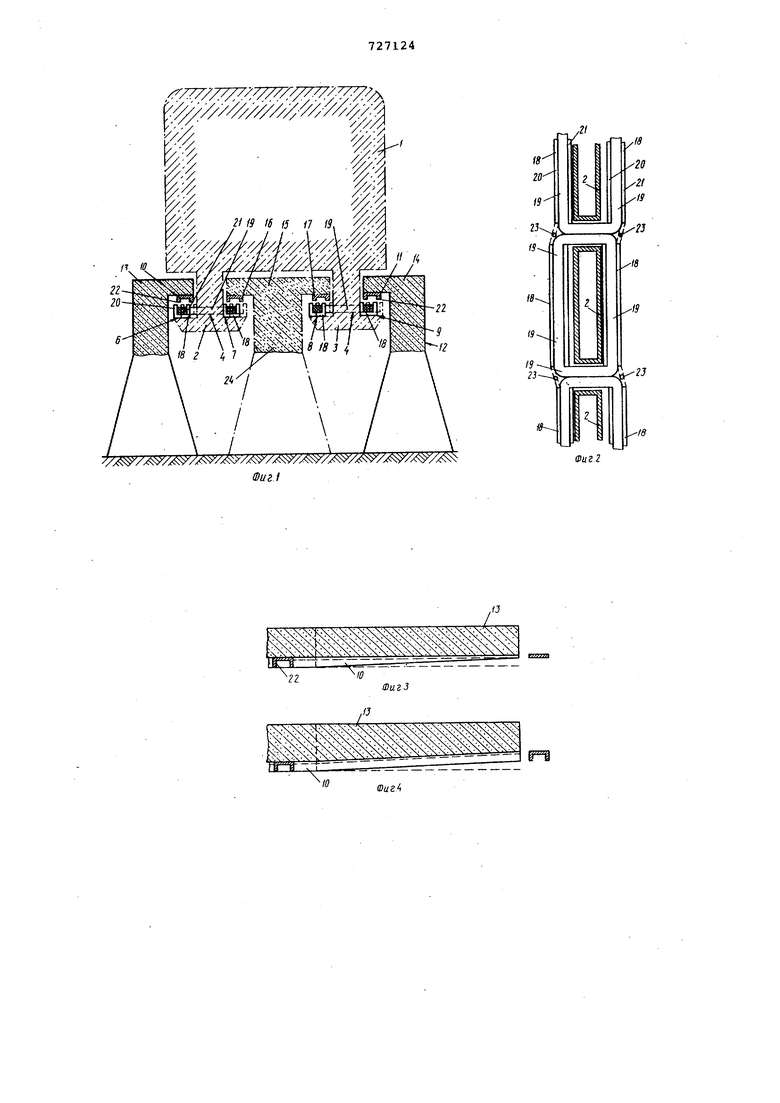
На фиг. 1 представлен экипаж на магнитной подвеске с двумя внешними путевыми балками, поперечное сечение; на фиг. 2 - ряд электромагнитов, вид всверху на фиг. 3 - концевой участок якорной шины с уменьшакяцимися в концу шины боковыми плечами; на фиг. 4 - концевой участок
якорной шины с уменьшающейся к концу путевой балкой; на фиг. 5 - разветвление пути, вид сверху, путь с двумя внешними путевыми балками; на фиг. 6 - то же, путь с одной централной путевой балкой; на фиг. 7 - экипаж на магнитной подвеске в зоне входа в разветвление, поперечное сечение; на фиг. 8 - расположение обмоток возбуждения якорных шин, поперечное сечениз, на базовом плече; на фиг. 9 - то же, на боковых плечах.
Подвесной экипаж 1, изображенный на фиг. 1 контуром, имеет на своей нижней стороне две проходящие вдоль экипажа Т-образные опорные рамы 2 и 3, несущие соответственно ряды электромагнитов 4 и 5, состоящие соответственно из двух групп упрг1Вляемых электромагнитов б и 7 или
:8 и 9 таким образом, что магнитный контакт с якорной шиной может произвольно устанавливаться с правой или с левой стороны. Экипаж 1 магнитно подвешен к якорным шинам 10 и 11 пути 12 {см. фиг. 1), которые проходят в зоне влияния обеих внешних групп электромагнитов 6 и 9 рядов
:электромагнитов 4 и 5. Каждая шина смонтирована на нижней поверхности
;боковых путевых балок 13 и 14. Одинаково допустимо устройство пути на путевой балке 15, несущей на нижней стороне две якорных шины 17 и 17, находящиеся в магнитном контакте с обеими внутренними группами электромагнитов 7 и 8 рядов электромагнитов 4 и 5.
Каждый электромагнит на подвесном экипаже 1 имеет продольный сердечник 18 V-образного профиля, внутреннее пространство которого заполнено одной стороной катушки возбуждения 1 боковые плечи которого выполнены как сердечники полюсов 20 и 21, загнутые наверх к якорным шинам 10 и 11 пути 12. Вторая сторона, каждой катушки возбуждения 19 заполняет (см. фиг. 2) внутреннее пространство сердечника соседнего электромагнита, принадлежащего к другой группе электромагнитов ряда. Поэтому обмо.тка катушки возбуждения 19 постоянно возбуждает пару электромагнитов соседних групп, так что для управления безразлично, какая из обеих групп электромагнитов, ряда придан а якорной шине. Благодаря этому изменение направления пути может быть предусмотрено в любом месте транспортной сети.
Электромагниты 6 и 7 создают возможность для каждой группы электромагнитов наряду с управляемой несущей силой создавать и управляе 1ую направляющую силу, так как все расположенные слева электромагниты одной группы и все расположенные справа электромагниты управляемы отдельн
Профиль якорных шин 10, 11, 1Ь и 17 пути 12 также имеет V-образную фому и согласован в своих размерах с профилем сердечника 18 электромагнита. Якорные шины своим базовым плечом монтируются на путевых балках 13-15, причем их боковые плечи 22 выступают вниз навстречу полюсам 20 и 21 сердечников 18 электромагнитов Плоскость образованной таким образом магнитной цепи под якорной шиной располагается перпендикулярно продольной оси шины и электромагнита. Воздушный зазор между якорной шиной и сердечником электромагнита, который должен сохряняться постоянным, фиксируется с помощью большого числа измерительных щупов 23, причем разность между действительным и требуемым расстоянием используется для регулирования электромагнитов .
Обычно обе якорные шины в зависимости от конструкции пути находятся в контакте в внутренними 7 и В или внешними 6 и 9 группами электромагнитов рядов 4 и 5. Изменение направления пути 12 обусловливает места изменения направления якорных шин, т.е. места, в которых несущая функция передается от заканчивающейся, приданной одной группе электромагнитов, якорной шины на начинающуюся, приданную другой группе электромагнитов, якорную шину. Начало и конец обеих якорных шин 10, 16, 11 и 17 могут точно прилегать один к другому. Если электромагниты 6 и 9 достигают концов приданных им якорных шин 10 и 11 и продолжают отходить от них, то воздуждаемое ими влияние через эти якорные шины уменьшается вследствие увеличивающегося магнитного сопротивления. Однако возбуждаемые той же самой катушкой возбуждении 19 электромагниты 7 и 8 одновременно достигают начала других якорных шин 16 и 17 и входят в возрастающей степени в магнитный контакт с.ними, так что общее усилие, возбуждаемое магнитами пар 6 и 7 или 8 и 9 во время прохождения места изменения направления якорной шины остается в основном постоянным.
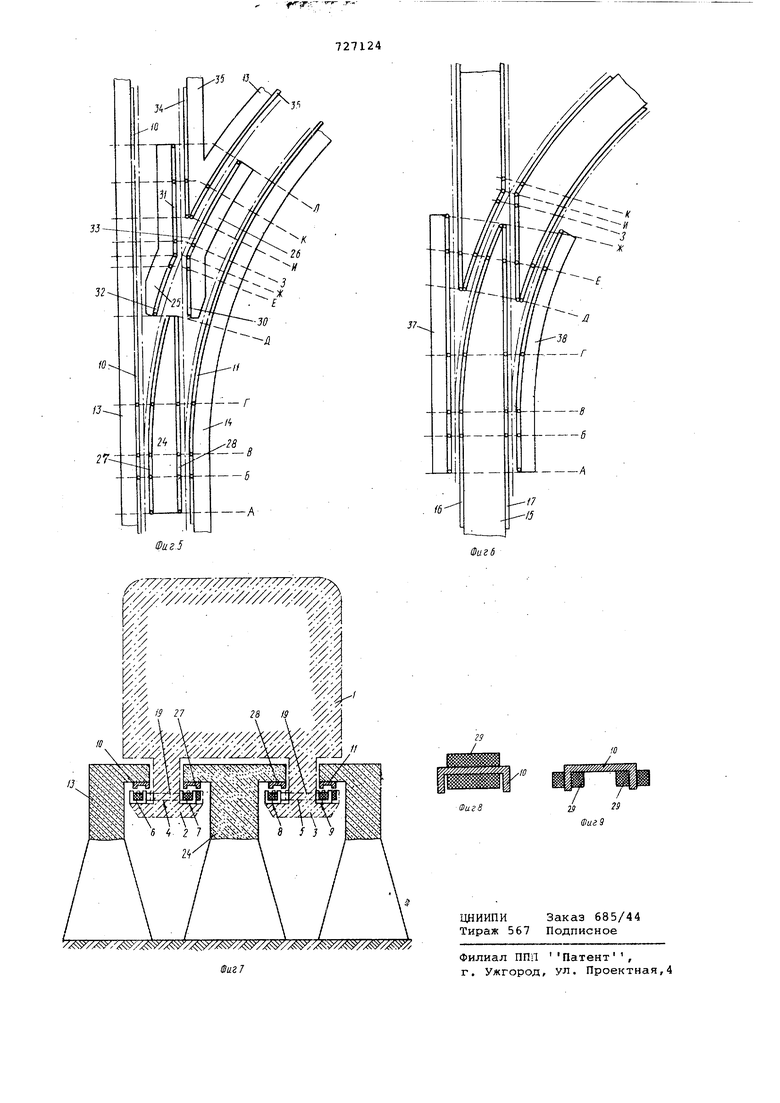
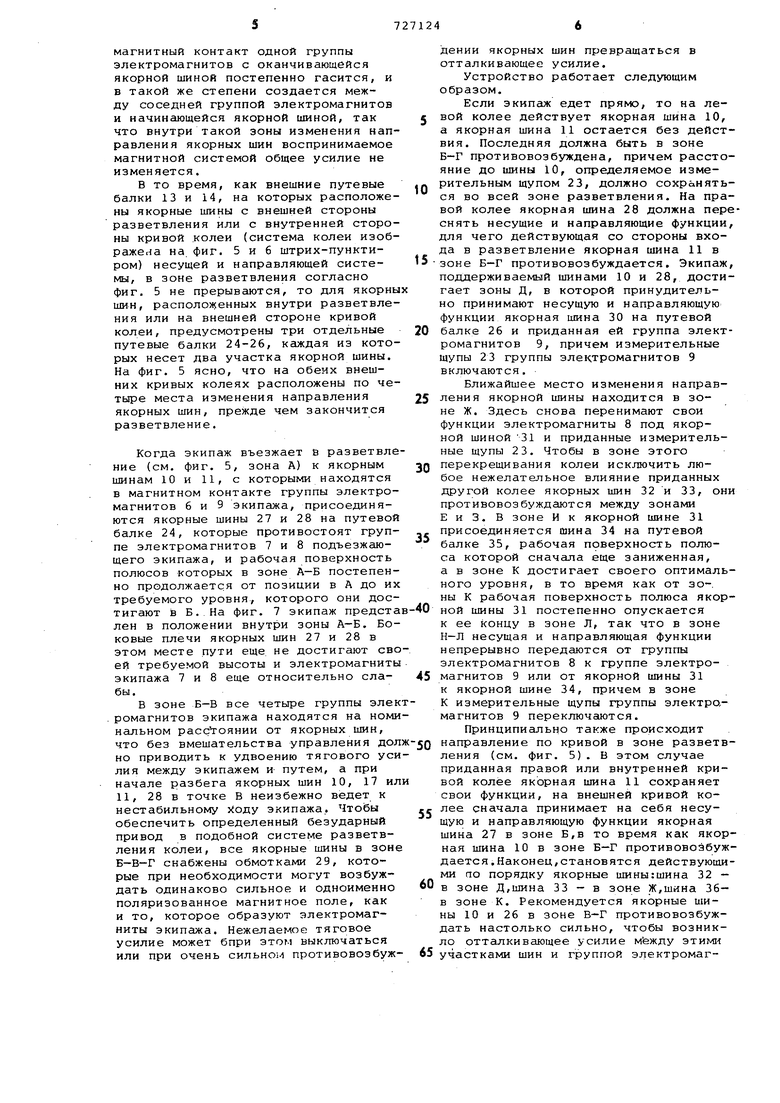
Переход несущей функции от одной якорной шины к другой происходит относительно медленно, так что обе якорные шины 10 и 16 или 11 и 17 на определенной длине перекрываются Действующая рабочая поверхность полюса якорной шины непрерывно отступает вверх, при этом, как показано на фиг. 3, высота боковых плеч якорной шины непрерывно уменьшается или, как показано на фиг. 4, якорная шина сохраняет свой профиль, однако целиком все более отходит от плоскости рабочей поверхности полюсов магнитов экипажа. Таким образом. магнитный контакт одной группы электромагнитов с оканчивающейся якорной шиной постепенно гасится, и в такой же степени создается между соседней группой электромагнитов и начинающейся якорной шиной, так что внутри такой зоны изменения нап равления якорных шин воспринимаемое магнитной системой общее усилие не изменяется. В то время, как внешние путевые балки 13 и 14, на которых расположе ны якорные шины с внешней стороны разветвления или с внутренней сторо ны кривой колеи (система колеи изоб ражена на фиг. 5 и 6 штрих-пунктиром) несущей и направляющей системы, в зоне разветвления согласно фиг. 5 не прерываются, то для якорны шин, расположенных внутри разветвле ния или на внешней стороне кривой колеи, предусмотрены три отдельные путевые балки 24-26, каждая из кото рых несет два участка якорной шины. На фиг. 5 ясно, что на обеих внешних кривых колеях расположены по че тыре места изменения направления якорных шин, прежде чем закончится разветвление. Когда экипаж въезжает S разветвле ние (см. фиг. 5, зона А) к якорным шинам 10 и 11, с которыми находятся в магнитном контакте группы электромагнитов 6 и 9 экипажа, присоединяются якорные шины 27 и 28 на путевой балке 24, которые противостоят группе электромагнитов 7 и 8 подъезжающего экипажа, и рабочая поверхность полюсов которых в зоне А-Б постепенно продолжается от позиции в А до их требуемого уровня, которого они достигают в Б. На фиг. 7 экипаж предста лен в положении внутри зоны А-Б. Боковые плечи якорных шин 27 и 28 в этом месте пути еще не достигают св ей требуемой высоты и электромагниты экипажа 7 и 8 еще относительно слабы. В зоне Б-В все четыре группы эле ромагнитов экипажа находятся на номи нальном расстоянии от якорных шин, что без вмешательства управления дол но приводить к удвоению тягового уси лия между экипажем и путем, а при начале разбега якорных шин 10, 17 ил 11, 28 в точке В неизбежно ведет к нестабильному ходу экипажа. Чтобы обеспечить определенный безударный привод в подобной системе разветвления колеи, все якорные шины в зон Б-В-Г снабжены обмотками 29, которые при необходимости могут возбуждать одинаково сильное и одноименно поляризованное магнитное поле, как и то, которое образуют электромагниты экипажа. Нежелаемое тяговое усилие может бпри этом выключаться или при очень сильном противовозбуж дении якорных шин превращаться в отталкивающее усилие. Устройство работает следующим образом. Если экипаж едет прямо, то на левой колее действует якорная шина 10, а якорная шина 11 остается без действия. Последняя должна быть в зоне Б-Г противовозбуждена, причем расстояние до шины 10, определяемое измерительным щупом 23, должно сохраняться во всей зоне разветвления. На правой колее якорная шина 28 должна переснять несущие и направляющие функции, для чего действующая со стороны входа в разветвление якорная шина 11 в зоне Б-Г противовозбуждается. Экипаж, поддерживаемый шинами 10 и 28, достигает зоны Д, в которой принудительно принимают несущую и направляющую функции якорная шина 30 на путевой балке 26 и приданная ей группа электромагнитов 9, причем измерительные щупы 23 группы электромагнитов 9 включаются. Ближайшее место изменения направления якорной шины находится в зоне Ж. Здесь снова перенимают свои функции электромагниты 8 под якорной шиной 31 и приданные измерительные щупы 23. Чтобы в зоне этого перекрещивания колеи исключить любое нежелательное влияние приданных другой колее якорных шин 32 и 33, они противовозбуждаются между зонами Е и 3. В зоне И к якорной шине 31 присоединяется шина 34 на путевой балке 35, рабочая поверхность полюса которой сначала еще заниженная, а в зоне К достигает своего оптимального уровня, в то время как от зо-. ны К рабочая поверхность полюса якорной шины 31 постепенно опускается к ее концу в зоне Л, так что в зоне Н-л несущая и направляющая функции непрерывно передаются от группы электромагнитов 8 к группе электромагнитов 9 или от якорной шины 31 к якорной шине 34, причем в зоне К измерительные щупы группы электромагнитов 9 переключаются. Принципиально также происходит направление по кривой в зоне разветвления (см. фиг. 5). В этом случае приданная правой или внутренней кривой колее якорная шина 11 сохраняет свои функции, на внешней кривой колее сначала принимает на себя несущую и направляющую функции якорная шина 27 в зоне Б,в то время как якорная шина 10 в зоне В-Г противовоэбуждается.Наконец,становятея действующими ао порядку якорные шины:шина 32 - в зоне Д,шина 33 - в зоне Ж,шина 36в зоне К. Рекомендуется якорные шины 10 и 26 в зоне В-Г противовозбуждать настолько сильно, чтобы возникло отталкивающее усилие между этими участками шин и группой электромагнитов 6 и 8, так как оно имеет npoTSiвОдействующие центробежным силам экипажа составляющие, которые уменьшают возбужденное группами электромагнитов 7 и 9 направляющее усилие. Переключение измерительных щупов ряда электромагнитов 4 соответствует достижению зон Б, Д, Ж и К.
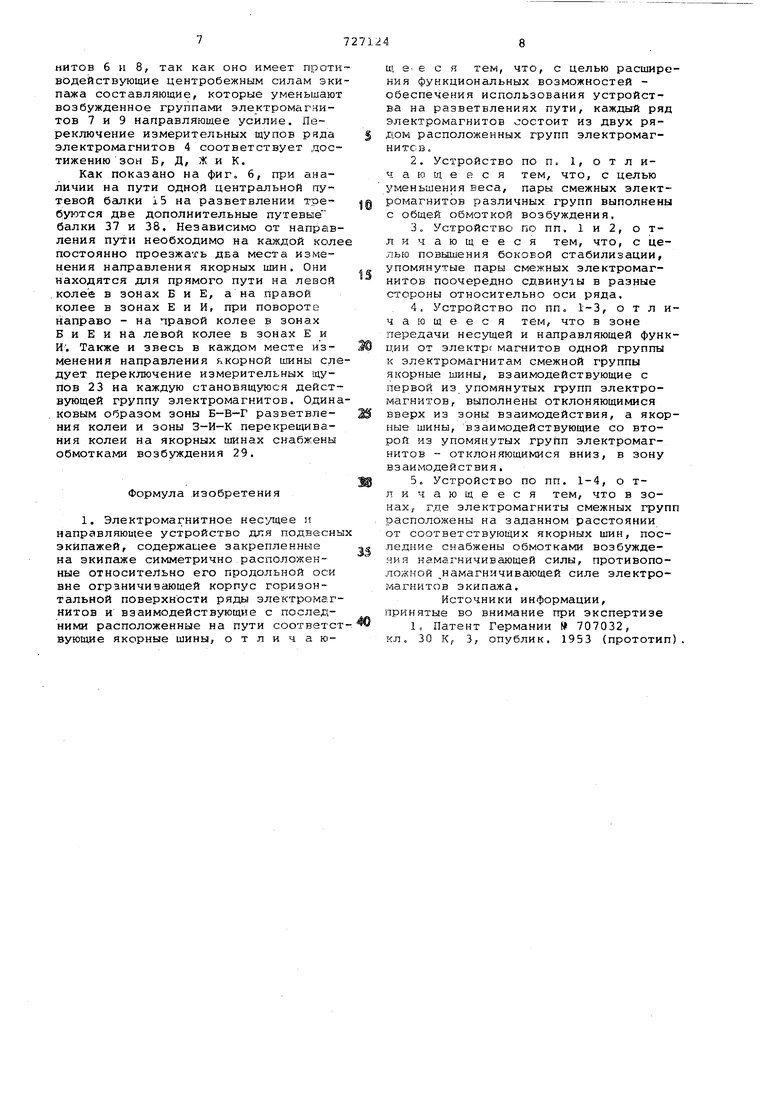
Как показано на фиг. 6, при аналичии на пути одной центральной путевой балки 15 на разветвлении требуются две дополнительные путевые балки 37 и 38. Независимо от направления пути необходимо на каждой коле постоянно проезжать два места изменения направления якорных шин. Они находятся для прямого пути на левей колее в зонах Б и Е, а на правой колее в зонах Е и И, при повороте Направо - на правой колее в зонах Б и Е и на левой колее в зонах Е и И; Также и звесь в каждом месте изменения направления вчкорной пины следует переключение измерительных щупов 23 на каждую становящуюся действующей группу электромагнитов. Одинаковым образом зоны Б-В-Г разветвления колеи и зоны 3-И-К перекрещивания колеи на якорных шинах снабжены обмотками возбуждения 29.
Формула изобретения
1. Электромагнитное несущее и направляющее устройство для подвесных экипажей, содержащее закрепленные на экипс1же симметрично .расположенные относительно его продольной оси вне ограничивающей корпус горизонтальной поверхности ряды электромагнитов и взаимодействующие с последними расположенные на пути соответствующие якорные шины, о т л и ч а ющ е- е с я тем, что, с целью расширения функциональных возможностей обеспечения использования устройства на разветвлениях пути, каждый ряд электромагнитов состоит из двух рядом расположенных групп электромагнитов .
2.Устройство по п. 1, отличающееся тем, что, с целью уменьшения веса, пары смежных электромагнитов различных групп выполнены с общей обмоткой возбуждения.
3.Устройство по пп. 1 и 2, отличающееся тем, что, с целью повышения боковой стабилизации, упомянутые пары смежных электромагнитов поочередно сдвинуиы в разные стороны относительно оси ряда,
4.Устройство по пп. 1-3, отличающееся тем, что в зоне передачи несущей и направляющей функции от электрс магнитов одной группы
к электромагнитам смежной группы якорные шины, взаимодействующие с первой из упомянутых групп электромагнитов, выполнены отклоняющимися вверх из зоны взаимодействия, а якорные шины, взаимодействующие со второй из упомянутых групп электромагнитов - отклоняющимися вниз, в зону взаимодействия.
5.Устройство по пп. 1-4, о тличающееся тем, что в зонах, где электромагниты смежных груп расположены на заданном расстоянии
от соответствующих якорных шин, последние снабжены обмотками возбуждения намагничивающей силы, противоположной намагничивающей силе электромагнитов экипажа.
Источники информации, принятые во внимание при экспертизе
1, Патент Германии I 707032, кл. 30 К, 3, опублик, 1953 (прототип
4 y :i //ff //(/,
Фиг
21
П
Фиг2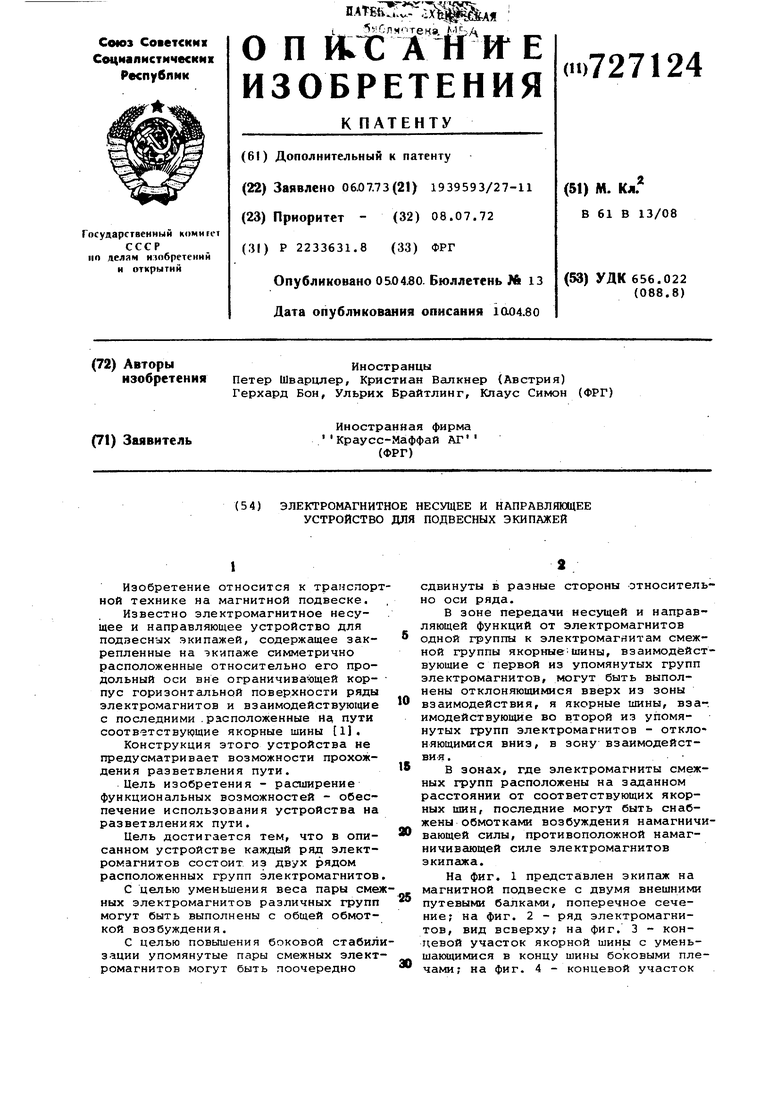
| название | год | авторы | номер документа |
|---|---|---|---|
| Электромагнитное несущее и направляющее устройство для подвесных экипажей | 1975 |
|
SU566514A3 |
| Электромагнитное несущее и направляющее устройство для подвесных экипажей | 1975 |
|
SU546271A3 |
| СТЕНД ДЛЯ ИССЛЕДОВАНИЯ ТРАНСПОРТНЫХ СРЕДСТВ С ЭЛЕКТРОМАГНИТНЫМ ПОДВЕСОМ | 1984 |
|
SU1362241A1 |
| ТРАНСПОРТНОЕ УСТРОЙСТВО НА ЭЛЕКТРОМАГНИТНОЙ ПОДВЕСКЕ | 1982 |
|
SU1108670A1 |
| Путевое устройство для транспортного средства с электродинамической подвеской и линейным синхронным двигателем | 1978 |
|
SU941231A1 |
| Транспортное устройство с электродинамической подвеской и линейным синхронным двигателем | 1977 |
|
SU906122A1 |
| Устройство для изменения положения функционального элемента в лентопротяжном механизме магнитного аппарата | 1988 |
|
SU1835087A3 |
| Транспортная система на магнитной подвеске | 1987 |
|
SU1431221A1 |
| ЛИНЕЙНЫЙ СИНХРОННЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1986 |
|
SU1371370A1 |
| УСТРОЙСТВО ЭЛЕКТРОМАГНИТНОЙ ПОДВЕСКИ И ТЯГИ ЭКИПАЖА ТРАНСПОРТНОГО СРЕДСТВА | 1982 |
|
SU1145585A1 |