(54) ЭЛЕКТРОМАГНИТНОЕ НЕСУЩЕЕ И НАПРАВЛЯЮЩЕЕ УСТРОЙСТВО ДЛЯ ПОДВЕСНЫХ ЭКИПАЖЕЙ
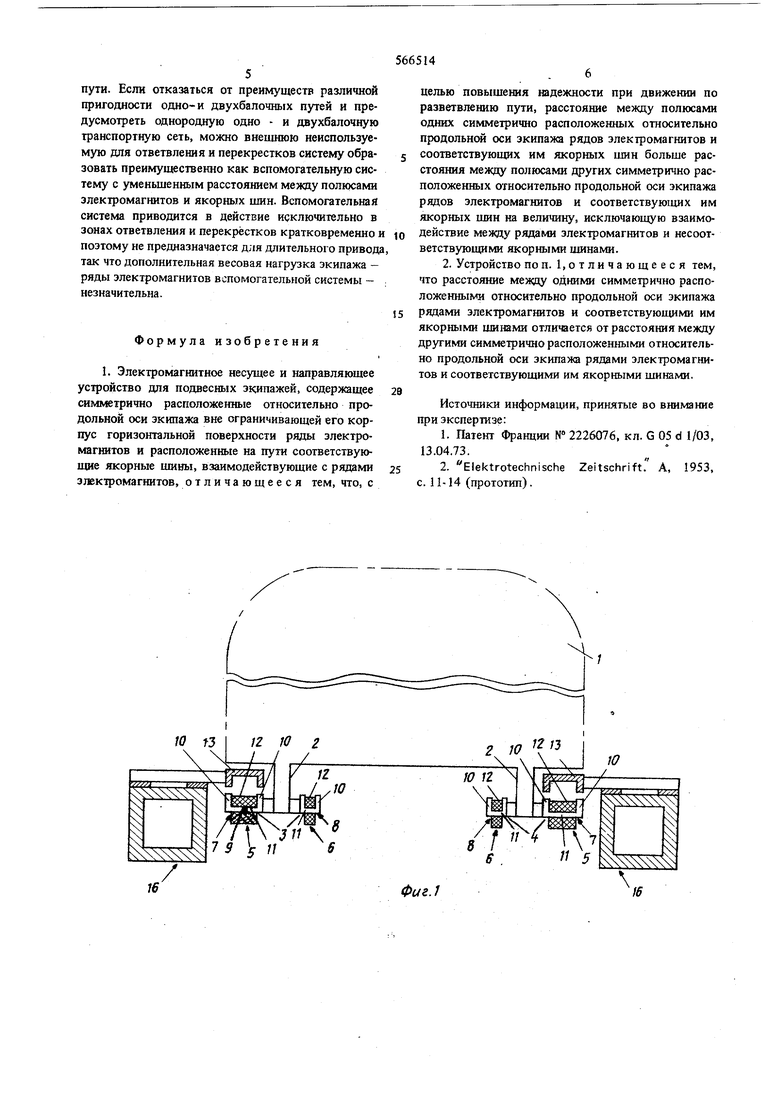
корпуса имеет выступающие кронштейны 2, на которых укреплены две магнитные системы 3 и 4. Каждая магнитная система 3 или 4 состоит из двух рядов 5 и 6 элекгрогчкпштов 7 и 8, расположенных вдень озновйой чзглл экипажа. Рядьг 5 и 6 электромагщ тов располагаются каждый справа и слева от кронштейш 2, причем оба внеиших ряда 5 электромагнитов принадлежат к главной системе, а оба внутренних ряда 0 - к вспомогательной системе. Электромагниты 7 и 8 имеют сердечник 9 U-образного профиля, полюсы 10 жоторого обращены вверх, а основная часть 11 несет обмотку 12 возбуждения. Электромагниты основнсж системы предназначены для длительней работы и имеют большее расстояние между полюсами 10 своих Сердечников и больщее поперечное сечение обмотки 12 возбуждения, чем электромагниты вспомогательной системы.
Подвесной -жкпаж взаимодействует с электромагнитами 7 своей главной системы с соответствующими якорными шинами 13-15 двухбалочного пути 16, в то время как вспомогательная система бездействует. Вспомогательная система включается только внутри закруглений или перекрестков пути на короткое время (там, где главная систе та должна быть прервана).
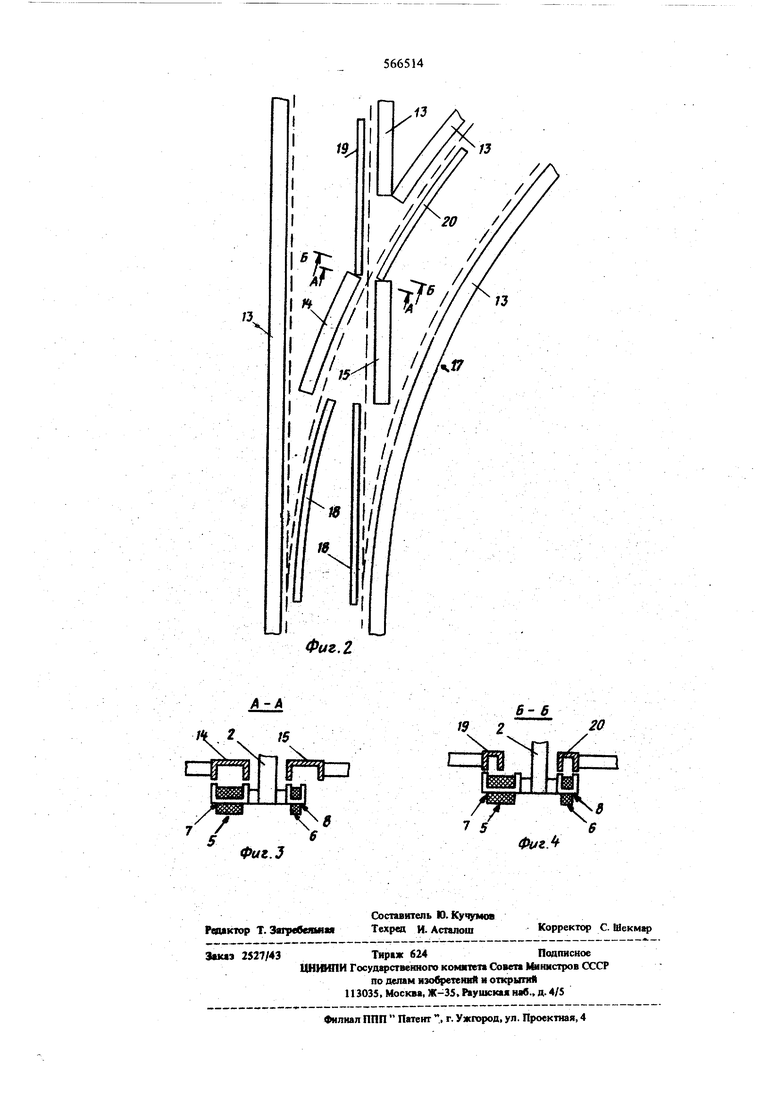
На фиг. 2 показан момент прохождения якорных щин в зоне ответвления 17 пути. Изображенные широкими якорные шины принадлежат главной системе и азваимодействуют с широкими электромагнитами 7 подвесного зкипажа , узкие шины 18-20 принадлежат вспомогательной системе и согласованы с сердешикаля узких электромагнитов 8.
При прохождении ответвления 17 .в прямом направлении одна из двух магнитных систем 3 и 4 подвесного экипажа Г проходит через четьфе места изменения направления якорных шин, в несущая функция передается от злектромагнитов главной системы на магниты вспомогательной системы и обратно. Если зкипаж въезжает в ответвление, то при прямом направлении главная система остается включеннсщ m левой стороне зкипажа, в то время как при криволи1Мном направлении главтя система правой стороны зкипажа не проходит никаких мест изменения направления яксфкой шины. Соответственно этому смет несущей функции при прямом направлении от одной системы к другой и наоборот происходит на правой стороне экипажа, а при направлении по кривой - на стороне Экипажа.
На фиг. 2 видно, что неиэбежньсе ш каждом ответвлении пересечезшя якорных ишн имеют точки встречи четырех якорных шин 14-15,19-20 обеих систем. Независимо от того, в каком направлении проходят такие места пересечения якорных шии,, происходит чередование якорных шин и вместе с этим переддт несущей функций от одной системы к другой. Непосредственно перед месте пересечения якорных ишн действуюнея систег а 11р1Й лижается к
соответствующей лругому направлению движения якорной шине той же системы и попадает в недействующую систему, которая уже должна быть возбуждена, так как непосредственно через нее предстоит передача йесущей функции (см. фиг. 3).
Входящий в кривую пути подвесной зкипаж 1 проходит левой магнитной системой 3 место пересечения якорнь Х шин, в ; котором происходит передача несущей функции от электромагнитов 7 электромагниту В. Перед пересечением электромагнит 7 находится в контакте с якорной шиной 14, а возбужденный электромагнит 8 вспомогательной системы отходит от якорной шины 15 главной системы, которая имеет несущую функцию только при прямом направлении.
На фиг. 4 показано, что теперь уже не несущие, но еще возбузеденные электромагниты одной системы непосредственно за местом пересечения якорных цюн находятся под якорной шиной для другого направжния движения щ)угой системы. Несущая функция переходит на электромагнит 8 вспомогательной системы, который входит в контакт с якорной шиной 20 вспомогательной системы. Над еще во ужденными электромагнитами 7 главной системы еще находится ударная шина 19, предвазначеиная для прямого пути вспомогательной системы.
Благодаря такому исполнению злектромагиитеш и якорных щин обеих систем отсутствует/ заметное магнитное«взаимодействие между еще неснабженными или уже не снабжаемыми несушей функцией компонентами системы, встречаются в результате противовозбуждения соответствуюцщх якорных шин. Вследствие различных расстояний между полюсами (см. фиг. 3 справа: электромагнит 8 и шина 15 и фиг. 4 слева: электромагнит 7 и шина 19) значительиого магнитного взаимодействия не происходит, так как сопротивление нежелательной магиитнш цепи из-за промежуточного подключения по крайней мере одного значительного воздущного зазора достигает очень , большого значения. Поэтому можно отказаться от противовозбуждения якорных шин 14, 15, 19 и 20 в зоне перекрещивания якорных шин.
Обе системы экш1ажа могут наряду с несущей фуикшей использовать также и направлякщую функцию, в то время как мапмтные ряды лежандах друг за другом электромагнитов смещаются вправо и влево относительно соответствукяцей якорной цшны при монтаже на кронштейнах экипажа. Смеoj HHbie вправо и влево электромагниты управляются группами по отдельности. Таким образом, в зоне пересечения стало возможным отказаться от спещальных возбуждающих устройств для исключею1Я резких боковых и вертикальных ударов при пересечеши якорных пши. йзличная ширина выполнения обеих систем уменьшает любую нежелательную мапштную связь между ними так, что обе системы Moiyt возбуждаться при прохождении мес пересечения вйутри пересечения или отклонения
пути. Если отказаться от преимуществ различной пригодности одио-и двухбалочных путей и предусмотреть однородную одно - и двухбалочную транспортную сеть, можно внешнюю неиспользуемую для ответвления и перекрестков систему образовать преимущественно как вспомогательную систему с уменьшенным расстоянием между полюсами электромагнитов и якорных шин. Вспомогательная система приводится в действие исключительно в зонах ответвления и перекрестков кратковременно и поэтому не предназначается для длительного привода так что дополнительная весовая нагрузка экипажа - ряды электромагнитов вспомогательной системы - незначительна. Формула изобретения
1. Электромагнитное несущее и направляющее устройство для подвесных экипажей, содержащее симметрично расположенные относительно продольной оси экипажа вне ограничивающей его корпус горизонтальной поверхности ряды электромагнитов и расположенные на пути соответствующие якорные шины, взаимодействующие с рядами электромагнитов, отличающееся тем, что, с
целью повыщения надежности при движении по разветвлению пути, расстояние между полюсами одних симметрично расположенных относительно продольной оси экипажа рядов электромагнитов и соответствующих им якорных пшн больше расстояния между полюсами других симметрично расположенных относительно продольной оси экипажа рядов электромагнитов и соответствующих им якорных пшн на величину, исключающую взаимодействие между рядами электромагнитов и несоответствующими якорными шинами.
2. Устройство поп. 1,отличающееся тем, что расстояние между одними симметрично расположенными относительно продольной оси экипажа pядaJvlи электромагнитов и соответствующими им якорными шинами отлищется от расстояния между другими симметрично расположенными относительно продольной оси экипажа рядами электромагнитов и соответствующими им якорными шинами.
Источники информации, принятые во внимание при экспертизе:
1.Патент Франции № 2226076, кл. G 05 d 1/03, 13.04.73.
2. Elektrotechnische Zeitschrift. А, 1953, с. 11-14 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Электромагнитное несущее и направляющее устройство для подвесных экипажей | 1975 |
|
SU546271A3 |
| Электромагнитное несущее и направляющее устройство для подвесных экипажей | 1973 |
|
SU727124A3 |
| ПОДВЕСНАЯ МОНОРЕЛЬСОВАЯ ТРАНСПОРТНАЯ СИСТЕМА | 2002 |
|
RU2219082C1 |
| ТРАНСПОРТНОЕ УСТРОЙСТВО НА ЭЛЕКТРОМАГНИТНОЙ ПОДВЕСКЕ | 1982 |
|
SU1108670A1 |
| Транспортная система | 1980 |
|
SU912575A1 |
| Транспортная система на магнитной подвеске | 1987 |
|
SU1431221A1 |
| МНОГОПОЛЮСНЫЙ ЭЛЕКТРОМАГНИТНЫЙ КОММУТАЦИОННЫЙ МОДУЛЬ | 2000 |
|
RU2219616C2 |
| Буквопечатающий телеграфный аппарат | 1935 |
|
SU47333A1 |
| Устройство для изменения положения функционального элемента в лентопротяжном механизме магнитного аппарата | 1988 |
|
SU1835087A3 |
| СПОСОБ ЭЛЕКТРОПИТАНИЯ | 2015 |
|
RU2586895C1 |
Фиг./
