(54) ДАТЧИК ПОЛОЖЕНИЯ РОТОРА ДЛЯ БЕСКОЛЛЕКТОРКОГО ЭЛЕКТРОДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА
| название | год | авторы | номер документа |
|---|---|---|---|
| Бесконтактный вращающийся трансформатор | 1972 |
|
SU501452A1 |
| Вентильный электродвигатель | 1977 |
|
SU675544A1 |
| Дифференциальный индукционный датчик углового положения и частоты вращения | 1990 |
|
SU1796891A1 |
| Датчик положения ротора для вентильного электродвигателя | 1978 |
|
SU788291A1 |
| ИНДУКТИВНЫЙ ДАТЧИК ПОЛОЖЕНИЯ РОТОРА БЕСКОЛЛЕКТОРНОГО ДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА | 2000 |
|
RU2176846C1 |
| Двухфазный двоичный датчик угла | 1978 |
|
SU758411A1 |
| Индукционный редуктосин | 1990 |
|
SU1830597A1 |
| Многополюсный вращающийся трансформатор | 1982 |
|
SU1065978A1 |
| Вентильный электродвигатель | 1981 |
|
SU1053231A1 |
| ДВУХФАЗНЫЙ НЕРЕВЕРСИВНЫЙ ВЕНТИЛЬНО-ИНДУКТОРНЫЙ ДВИГАТЕЛЬ | 2004 |
|
RU2266604C1 |
Изобретение относится к электрическим машинам малой мощности и может быть использовано в бесколлекторных электродвигателях с электронной коммутацией.
Известны индукционные датчики по ложе шш ротора, содержащие плоский кольцеобразный статор с обмотками и безобмоточный явпополюсный ротор. Первичная обмотка датчика расположена равномерно по окружности статора, а вторичные обмотки выполнены в виде секций, соединенных между собой по дифференциальной схеме 1 .
Известен также индукционный датчик положения ротора, например индукционный микросин, который содержит зубчатьш статор с обмоткой возбуждения и выходными обмотками и явнополюсный безобмоточный ротор. Каркасные катущки обмоток уложены на зубцах статора, по две на каждом зубце. Первые катушки чередующейся полярности соединены последовательно и создают обмотку возбуждения. Вторые катушки соединены последовательно-встречно и образуют однофазную или двухфазную сигнальную обмотку 2. На выходе микросина получается напряжение, меняющееся от угла поворота по закону, близкому к трапеции.
изменением сов.
Данное устройство наиболее о.низкое к из;юпетенпю по технической схшкости и рч п :зсмой задаче.
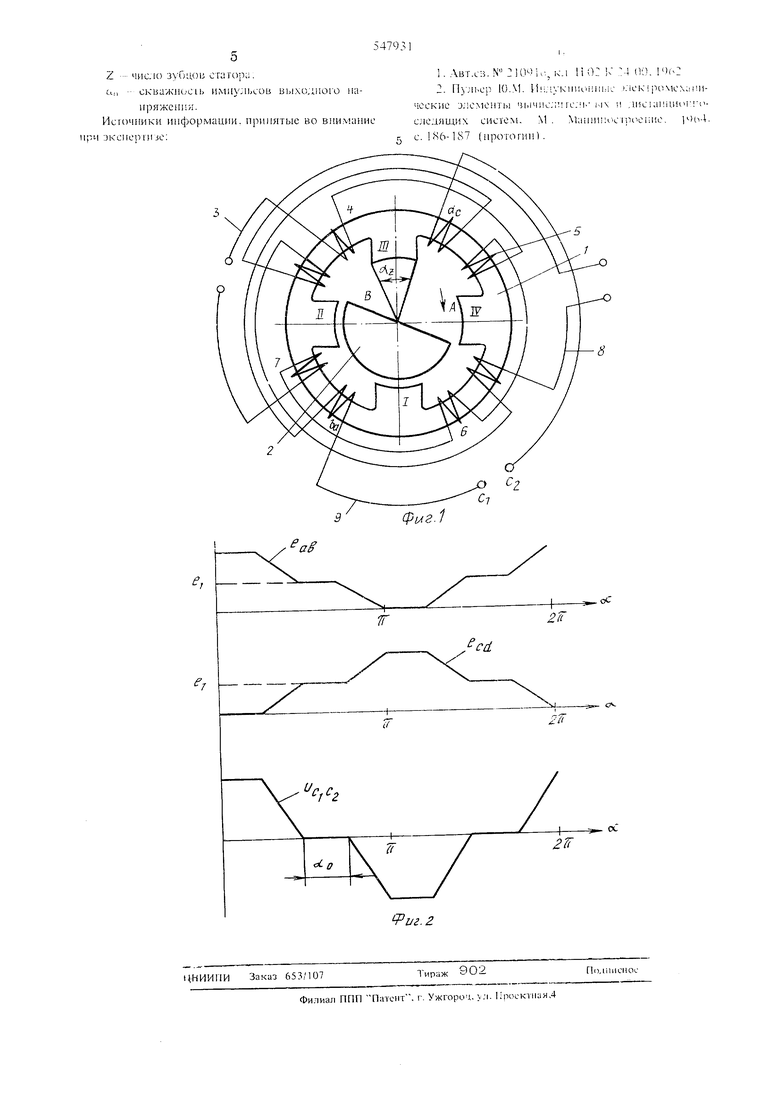
Недостатком известных инцук11ион)п,х датчиков положет5я poroji: беС):оллекгорных электродвигателей является нс:11рерывн:-)Й хапакт к/ивой выходного сигнала п ззв5;сил;ости от угла ио;;орота ротора. Ког7да такой датч1,к ущ авлчс: ; лскт;1ОНгП)Г1; (в частности.. тнрнстор|1ым) коммутатооом. при переходе сигнала через нуль, тиристор успевает погаснуть, т.е. происходит соой Б ,иок)1ом процессе. Вь ражается это в том. что ток з обмотке двигателя не меняет своего :аправлеш к, Б то время как полярность нолюса ротора иоя обмоткой уже изменилась. В г;езу.- ьтате в двигателе возникает момент противополо-к-;ого знака, т.е.- по cyujecTBv. тормозной момент, что прнво;д1т к снижен :;) скорости, повыи епию потребляемой моил-оел: л понижению КПД всего устр01;ства.
Для исключения полоблых явлений кривая зависимости .дно1о сигнала датчика о: v-jMa поворота должна рерьгвие - Г характер, т.е. содержать участк;; i; нулевым 31;аче;-лем. иоеле которых знак с-ггна.ла менялся 5ь; ла нпоп вогюложньн ;. ii ючепие дли гс.Мм..С1и i;.ici)oui iiipiu:iup x,- iciiacr 1К)гасиуп.. чю (i()cciiciii)i::c i иорма.ц.нук kOMMyiaiuiK) и uuiibiiiiciinc лкргстических характсрп.лик лиигшсля. IL;.;b iriiidji.MOUl |iacl 11ИрС 1Ис (|iy ПК ЦИОНЦЛ1i;i,i i;(Vi iu/KiK4-:.4i ;,а1чика положения poiopu oecisiM ii.is. )1 п - амсгродимгаголя за clci получения .Л1011 ipip кривой выходного напряжения. J 10 Л .iciit иС ся iLM. 410 секции обмоток статоn.i uiiijiic. - ожс11 на ярме между бубнами аатора, iiri) чллои,; iic, дуги кажюго зубца ; о :.;р.1 1;. раинон / гтГх ); .. г. Лои,1/ ; iiiiMM iiviKicnoii i,i 11 jioiiipa: Or) -- зал нпы11 У ол }. чао1ка прорывания 1 Ь ход1И л ;. ,: 1,Ла : Z , 1 iluoi; скпора. 11а (j)iti . I в качсоие примера ноказана ICOH -,|р(кн.ия индчкшюниого датчика ноложении ротоJXI 1л;. v,::K,vi,4;-/ич)иого Jдeк 1родви| а на .))|1 . 2 ;, S. 11 ))(( oi угла iioiUMioia poiopa i; .Нч1|,| сс;.лк|;| н с .ммариое на|;|1яжеп1 с iia ;|. .1 :i м :1Пмо|1чН лаг-1И1ча. ...,, .,ii,;;;-ii-- л;. ноло/кепця |iOii pa (фш 11 .),.:ii/Kii i i:;uiop i; чогыр1.мч iyeiiaMH ii piuop .. ДНИ-,I ;i iioco:.;. Jlvia статора ftj. со лакляе i и/1 ii;. : :1:1; л ;;Ч1И1. I радусов. ,4Vi a Huл:()С,1 pi)i.;;.; i--;:-:.i - ,-i:)-|i ;;ri; Пых люикл ii, I л, - нпл11)1;.;; .;;:I iмЛ 1. обмш. ilxHHi; . ,,..,. Л;11ЧИКа Л;/К.,1 iiLl л.пора и ме/к ;. п|;.1ВЫл ромсж т1;,1л OOMOIKU i;v4G ж.юмии л Locunii из ceKiuiii 4 чсре дующейся 11(..1ярно: ги, cov-ли ионных после л/ч;; (ел-н ;, каждая ; ЛН iiaJH-Hi.ix -.OMOU,, 1 9 ДВУХ секций, .-,,|х ил iii)ouii;oi iv:i(VAfibi ежзубцовых 1Р1меж | к;;х и соелинеши.х до днффе юнциалмю:. ..хсме. ()бм1мк1|8 и сд1;инугы в iipocipaHci ве lui 9() ,ов. Индукционный датчик положения роюра бес олклч .)дек 1 родвигатедл раОоысг следило niM v.OiiJ ,;.М. .)ом1лкаЗ подключается к сети неременного . liji) MOM li секциях обмокж X м У иидукти - - ), lacroii) iHnaiii., i;poHopij,hoiiajn. но ле i pi4JojiHMociH ддя нотока зубца статора. (ill над- :.а -длходе (чбхкчкн Н и;н1 9 равен разности )Л( .мвух ceKiuiii, состаи.мяюших обмогку. При вращении роюра датчика ировош1мости .ютока зубцов стаюра меняются or минимального .J.O максималыюго значеиип в соответствии с чем меняется н 5ыход11ой сигнал. Если 1Ю13Орачив;пь ротор, например, из ноложеняя, показанного на фмг. I, по часовой стрелке, то )ДСд1Ндуктированная в секциях аЬ и cd, изменяется от угла тюворота ротора так, как зто показано на фиг. 2. На первом участке поворота полюс ротора перекрывает .зубцы и 11, что обеспечивает максимальиую проводимость потока и соответственно максимально., .ачение ЭЛС EI . индуктирова1Л1О1; ;; секции аЬ. Далее полюс с зубца Г . 1Г,Д1 JTO.M нроводимость нотока и сигнал умешлпи :;.:. Затем, при прохождении края полюса Л мсжд зубц,ам)1 Г и II, проводимость практически не меняется, поскольку зубец 11 все енте лерекрьи по/носом ротора. Соответственно )ЛС (е, ) на лом участке будет постоянной. При дальнейшем повороте ротора край полюса А сбегает с зубца II. чю 1)бусловливает дальиейпюе угленьшение проводимости вплоть до нуля. Уве.гичение проводимости вновь пачипается нри подходе края полюса В к зубцу Г , причем на участке между зубцами Г и II получается картина, аналогичная онисанной. с той ... разницей, что );;ный ноток замыкас;ся че|)ез зубец I Кривая ЭЛС ec(j имеет ют же вид. iio со сдвигом на . 180 градусов. В| |чт|тая из Sab кривую ecQ. нг.лучим ;,змене1)Ия ubiходно1о си1Л1ала U oi угла поворота ротора. jioii кривой (см.фи. 2) л11.1 участка с нхлевы.м Л налом. Величина а,, с)11)е.аеляегся соотноиление.ч; меж.1.4 |1азмерами иолюсно) . .уги ротора (о,-,) и .вым .л.елением статора ( При проектировании датчика угловая ве.шчина ду| и каждо о зубца статора должна вынолняться соответствующей углу Q , определенному как разность между У1ДОМ HOJHOca fjoiopa и )BOi о .(сления стаюра с заданным г.юх о . i .с /, , ь: к х -Ко)7 |де Z чис.ю зубцов статора. При работе датчика с :злек;ро.иЛ1га1елсм оосспечивается сщгжеиие нотреблясмо мощности н повышение КПЛ, но сравнении. с изнесттнлми инд.укционны.ми да пик а ми. Форм у да и 3 о б р е т опия Датчик положет1ия ротора я)тя бесколлекторного злектродвигагеля тюстоянного тока, содержаашй зубчатый статор с обмоткой возбуждения и выходны.ми обмотками, каждая из 1соторых выполнена в виде секций, соединенных между собой но дифференциальной схеме, и безобмоточны ротор, о т л ичающийся тем, что, с цельто расширения функциональных возможностей за счет иолучения имнульсной формы кривой ВЫХОДН01-0 напряжения, казанные обмотт и расположень на ярме статора между его зуоцами, т(ричем угловая величина дуги каждого зубп.а статора вт;1нолнена равной. / рТГ-ч где а„ - угловая величина дуги зубца статора; ttp - угловая ве; ичина дуги полюса ротора;
