1
Изобретение относится к области электротехники и автоматики и может быть использовано для привода в позиционных автоматических системах управления станками с цифровым программным управлением, графопостроптелях, устройствах наведения.
Известно устройство, в котором используются ультразвуковые колебания пьезоэлементов, подключенных к источнику периодического напряжения, для приведения в движение магнитной ленты.
Наиболее близким по технической сущности к изобретению является двигатель, который содержит два идентичных жестко соединенных между собой блока с пьезоэлементамп и рабочим органом. Однако такой двигатель по своим функциональным воз.можностям приспособлен для работы только по одной координате, требует сложной системы управления работой подвижек и фиксаторов, при использоваНИИ в чертежных автоматах предусматривает связи между двигателями, работающими по осям X и Y, что усложйяет конструкцию и снижает точность ее работы в целом.
Целью изобретения является обеспечение работы двигателя одновременно по двум координатным осям.
Цель достигается тем, что каждый блок снабжен размещенными в направляющих пазах рабочим органом и держателями пьезоэлементов, расположенных попарно симметрично под углом к рабочему органу, одним концом жестко закрепленных в держателях, а другим прижатых к рабочему органу. При этом рабочие органы обоих блоков расположены в параллельных плоскостях и взаимно перпендикулярны.
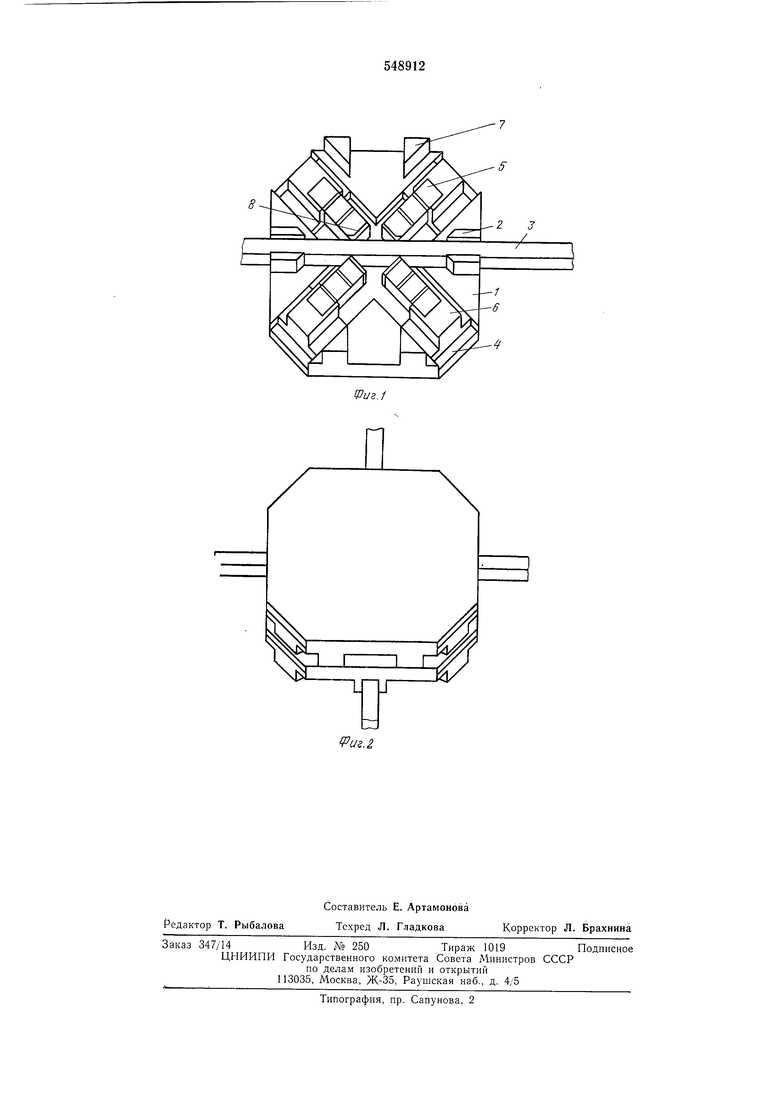
На фпг. 1 показан один из идентичных блоков двигателя; на фиг. 2 - общий вид двигателя.
Каждый блок двигателя состоит из основания 1 в виде шестигранной пластины с равными противоположными гранями и с направляющим пазом 2, в котором расположен рабочий орган 3, два взаимно перпендикулярных паза 4, в которых расположены четыре пьезоэлемента 5, попарно жестко закрепленных одним концом при помощи четырех держателей 6, а другим концом под углом упирающихся в рабочий орган 3. Основание 1 имеет четыре выступа 7 для стыковки блоков. Пьезоэлементы имеют наконечники 8, например стальные, предохраняющие их от износа.
Работа пьезоэлементов обоих блоков функционально связана с помощью с.хемы управления (на чертеже не показана).
Принцип действия блока заключается в следующем.
Для передвижения рабочего органа 3, например вправо, на левую пару пьезоэлемеитов 5
подается синусоидальное напряжение ультразвуковой частоты. Под действием напряжения пьезоэлемеиты 5 первой пары расширяются, захватывают рабочий орган 1 и проталкивают его вправо на один шаг. При приложении напряжеиия, противоположного по знаку, иьезоэлемеиты сжимаются и готовятся для следуюи;его шага. В это время пьезоэлементы второй пары под действием постоянного напряжения находятся в сжатом состоянии и не препятствуют продвижению рабочего органа 3 вправо.
Для продвижения рабочего органа 3 влево синусоидальное напряжение иодается на иравую пару пьезоэлемеитов, а левая находится в сжатом состояиии под действием иостояииого наиряжеиия. Таким образом, рабочий орган 3 может иеремеишться по одной оси в любом направлении.
Если рабочий орган закрепить неподвижно, то ио иему пачИиает двигаться сам блок.
При соединении двух блоков в едниое иелое таким образом, чтобы рабочий орган одиого блока был наи.равлен вдоль оси X, а другого- вдоль оси Y, иолучается двухкоординатиый двигатель, сиособный совершать работу одиовремеиио по двум коордииатам.
Если же рабочие органы двигателей закрепить в нодшинииках, а последние в иаправляюш,их пазах таким образом, чтобы рабочие органы не передвигались вдоль своей оси, а свободно перемешались иа подшипниках поперек нее, то двигатель будет иредставлять собой активный двухкоординатный механизм, способпый по командам блока управления совершать сложные движения. В случае ирикренлеиия к нему, например, чертежного механизма иолучается чертежный автомат, способный работать с высокой точностью.
Управление скоростью движения ио осям осушествляется схемой управления.
Формула изобретения
Ультразвуковой шаговый двигатель, содержаш,ий два идентичных жестко соединенных между собой блока с пьезоэлементами и рабочим органом, о т л и ч а ю ш и и с я тем, что, с целью обеспечения работы двигателя одиовременио ио двум коордииатным осям, каждый блок снабжен размешенными в паиравляюш,их пазах рабочим органом и держателями иьезоэлемеитов, расиоложеиных иопарно симметрично под углом к рабочему органу, одним
концом жестко закрепленных в держателях, а другим прижатых к рабочему органу, при этом рабочие органы обоих блоков расположены в параллельных плоскостях и взаимно перпендикулярны.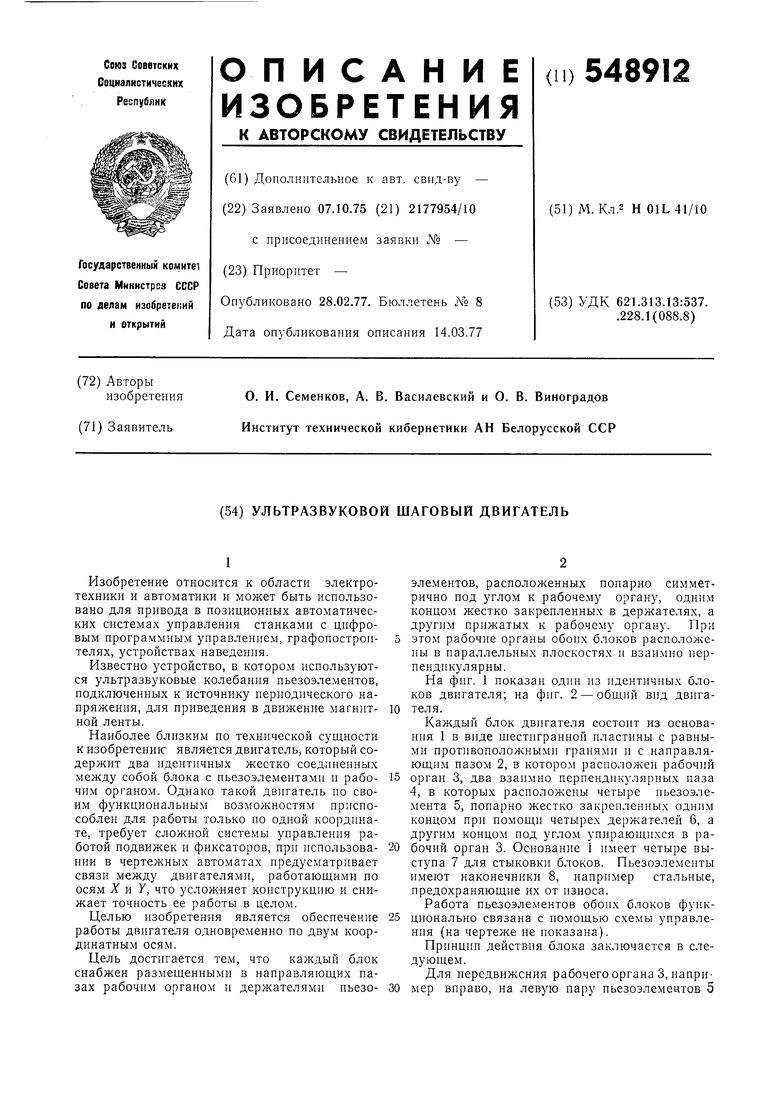
| название | год | авторы | номер документа |
|---|---|---|---|
| Ультразвуковой линейный шаговый двигатель | 1974 |
|
SU502426A1 |
| Линейный реверсивный вибродвигатель | 2018 |
|
RU2684395C1 |
| Способ управления линейным шаговым двигателем | 1976 |
|
SU613472A1 |
| Пьезоэлектрический двигатель | 1980 |
|
SU1023457A1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ДВИГАТЕЛЬ | 2004 |
|
RU2286001C2 |
| Двухкоординатный пьезоэлектрический двигатель | 1983 |
|
SU1312709A1 |
| Ультразвуковой шаговый двигатель | 1974 |
|
SU511647A1 |
| Кважинный акустический приемник | 1973 |
|
SU510681A1 |
| Линейный шаговый электродвигатель | 1981 |
|
SU1001348A1 |
| Привод запоминающего устройства | 1980 |
|
SU972583A1 |