Изобретение относится к электротехнике и автоматике и может быть использовано, в частности, в устройствах двухкоординатного прецизионного позицирования носителей информации ,
Целью изобретения является упрощение конструкции двигателя.
На фиг. 1 представлен предложенный двигатель, общий вид; на фиг. 2- то же, вид сверху.
Устройство содержит горизонтальное основание 1, установленное параллельно друг другу в направляющих пазах 2 и 3,два рабочих органа 4 и 5, пьезоэлементы 6-9, закрепленные одними концами в основании, другими концами прижатые к рабочим органам. Пьезоэлементы установлены попарно симметрично друг другу.
Рабочий орган 4 выполнен из двух частей, образующих клиновую пару, подвижный элемент 10 которой установлен в направляющем пазу II и взаимодействует с другим органом через стопор 2 его вертикального положения.
Стопор I2 может быть выполнен в виде пьезоэлемента, который с одной стороны жестко скреплен с подвижным элементом 10, а с другой расположен в вертикальном пазу 13.
Двухкоординатный пьезозлектричес- кий двигатель работает следующим образом.
Для продвижения рабочего органа 4 по горизонтальной координатной оси (например, влево) напряжение от источника питания подается на фиксирующий пьезоэлемент - стопор 12. При зтом последний за счет собственной деформации создает механический контакт с вертикальным пазом 13, объединяя рабочие органы 4 и 5 друг с другом. Совместное продвнжение рабочих органов осуществляется возбуждением пьезоэлементов 7 и 9 от источника переменного напряжения, в та таком случае другие пьезоэлементы 6 и 8 осуществляют подтормаживание.
Для продвижения подвижного элемента 10 по вертикальной координатной оси (например, вверх) фиксирующий пьезоэлемент - стопор 12 обесто
чивается, постоянное напряжение подается на пьезоэлементы 6 и 7, которые фиксируют рабочий орган 5, Затем возбуждают пьезоэлемент 9, что
приводит к продвижению рабочего органа 4 и его подвижного элемента 10, который вместе со стопором 12 поднимается вверх по вертикальному пазу 13, т.е. осуществляет движение по
вертикальной координатной оси.
Продвижение подвижного элемента 10 по двум координатным осям может производиться за счет разности скоростей движения рабочих органов одного
относительно другого.
Изменение скоростей движения рабочих органов относительно друг друга в зависимости от заданных координат производится регулировкой амплитуды
возбуждающего напряжения, подаваемого на пьезоэлементы.
Работа двухкоординатного двигателя не изменится, если систему стопор 12 - вертикальный паз 13 выполнить без использования пьезоэлемента.
Формула изобретения
1. Двухкоординатный пьезоэлектрический двигатель, содержа1ций горизонтальное основание, установленные в направляющих пазах два рабочих органа, пьезоэлементы, закрепленные
одними концами в основании, а другими концами прнжатые к рабочим органам, отличающийся тем, что, с целью упрощения конструкции, рабочие органы установлены параллельно друг другу, при 3TOVi один из этих органов выполнен из двух частей, образую1цих клиновую пару, подвижный элемент которой взаимодействует с другим органом через
стопор его вертикального положения, расположенный в вертикальном пазу, выполненном во втором органе, а пьезозлементы установлены попарно симметрично по обе стороны пары рабочих органов.
2. Двигатель по п. I, отличающийся тем, что стопор вы- полнен в виде пьезоэлемента.
/
BI
t3
Фиг.2
Редактор A. Шандор
Составитель Е. Лазарев
Техред Л.Сердюкова Корректор Г. Решетник
Заказ 1978/54 Тираж 661Подписное
ВНИШИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4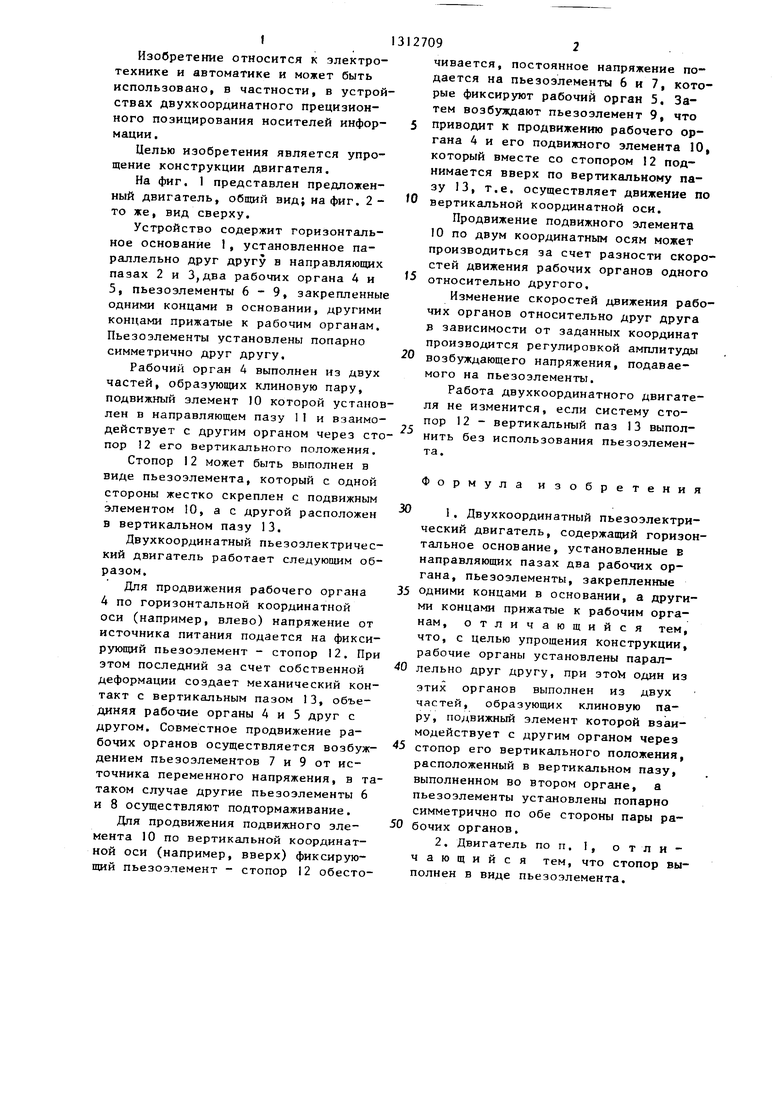
| название | год | авторы | номер документа |
|---|---|---|---|
| Линейный реверсивный вибродвигатель | 2018 |
|
RU2684395C1 |
| Ультразвуковой шаговый двигатель | 1975 |
|
SU548912A1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ЗЕРКАЛЬНЫЙ ИНДИКАТОР | 1970 |
|
SU271035A1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКОЕ УСТРОЙСТВО ПЕРЕМЕЩЕНИЯ | 1990 |
|
RU2050037C1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ШАГОВЫЙ ДВИГАТЕЛЬ | 1996 |
|
RU2167489C2 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ЛИНЕЙНЫЙ ШАГОВЫЙ ДВИГАТЕЛЬ | 1996 |
|
RU2181522C2 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ДВИГАТЕЛЬ | 2004 |
|
RU2286001C2 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ШАГОВЫЙ ДВИГАТЕЛЬ | 1996 |
|
RU2153219C2 |
| Двухкоординатный линейный электрический привод | 1980 |
|
SU936264A1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ДВИГАТЕЛЬ | 1995 |
|
RU2122275C1 |
Изобретение относится к электротехнике и может быть использовано в устройствах ;позицирования - носителей информации и других объектов. Изобретение позволяет упростить конструкцию двухкоординатных пьезоэлектрических двигателей. Двигатель содержит два рабочих органа 4 и 5 и пьезоэлементы 6, 8, 9. Рабочий орган 4 выполнен из двух частей, образующих клиновую пару. Подвижный элемент 10 жестко связан со стопором 20, который перемещается в вертикальном пазу 13. Подвижный элемент 10 перемещается вверх при перемеще- НИИ рабочего органа 4 влево. 1 з.п. ф-лы, 2 ил. ю Ю С оо to о со Фиг.1
| Лавриненко В | |||
| В., Карташев И | |||
| А,, Вишневский B.C | |||
| Пьезоэлектрические двигатели | |||
| - М.: Энергия, 1980, с | |||
| Зубчатое колесо со сменным зубчатым ободом | 1922 |
|
SU43A1 |
| Ультразвуковой шаговый двигатель | 1975 |
|
SU548912A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
