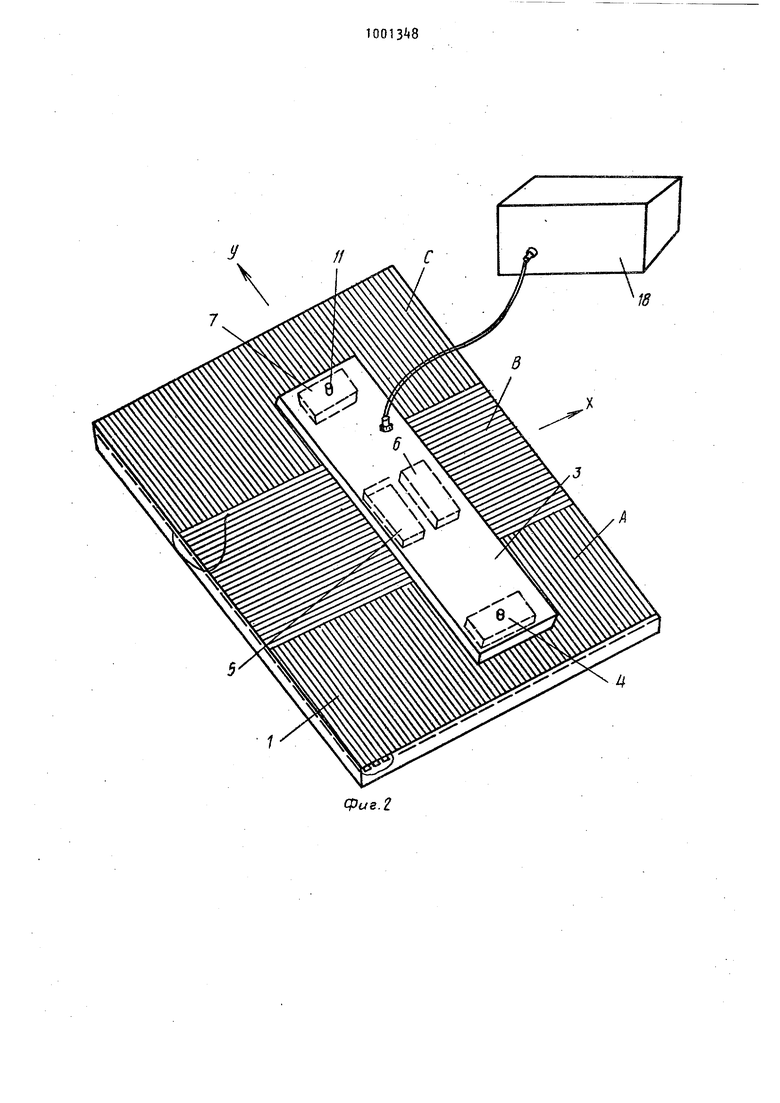
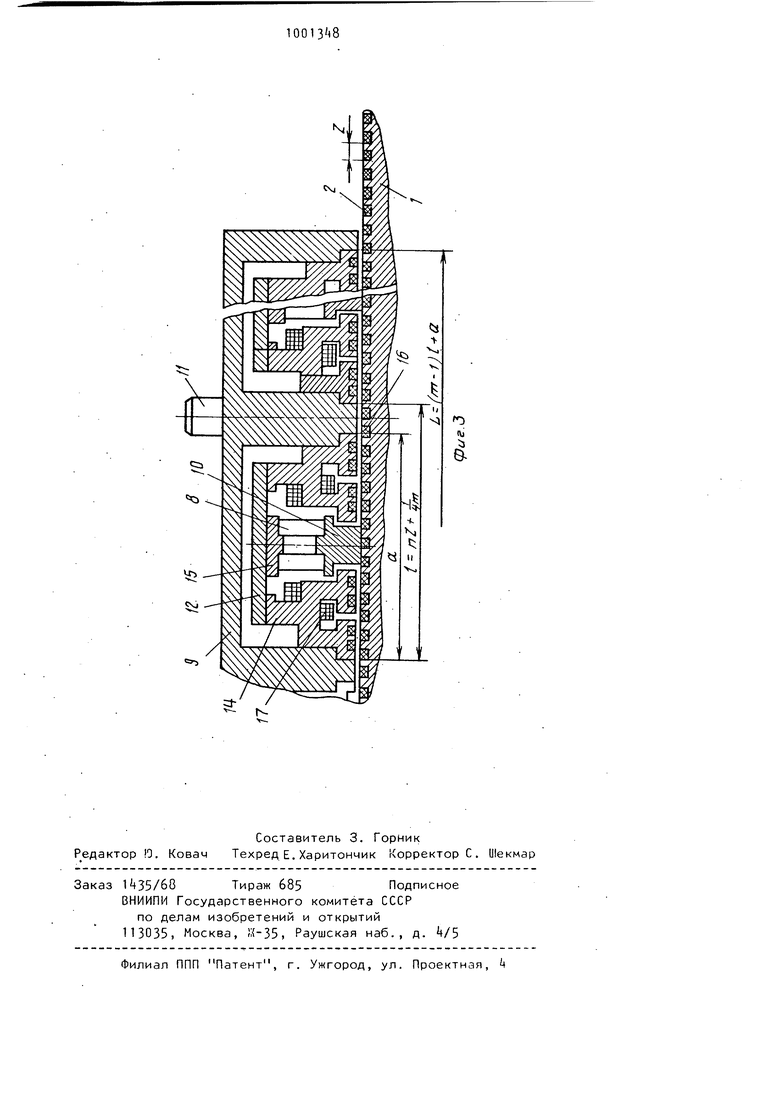
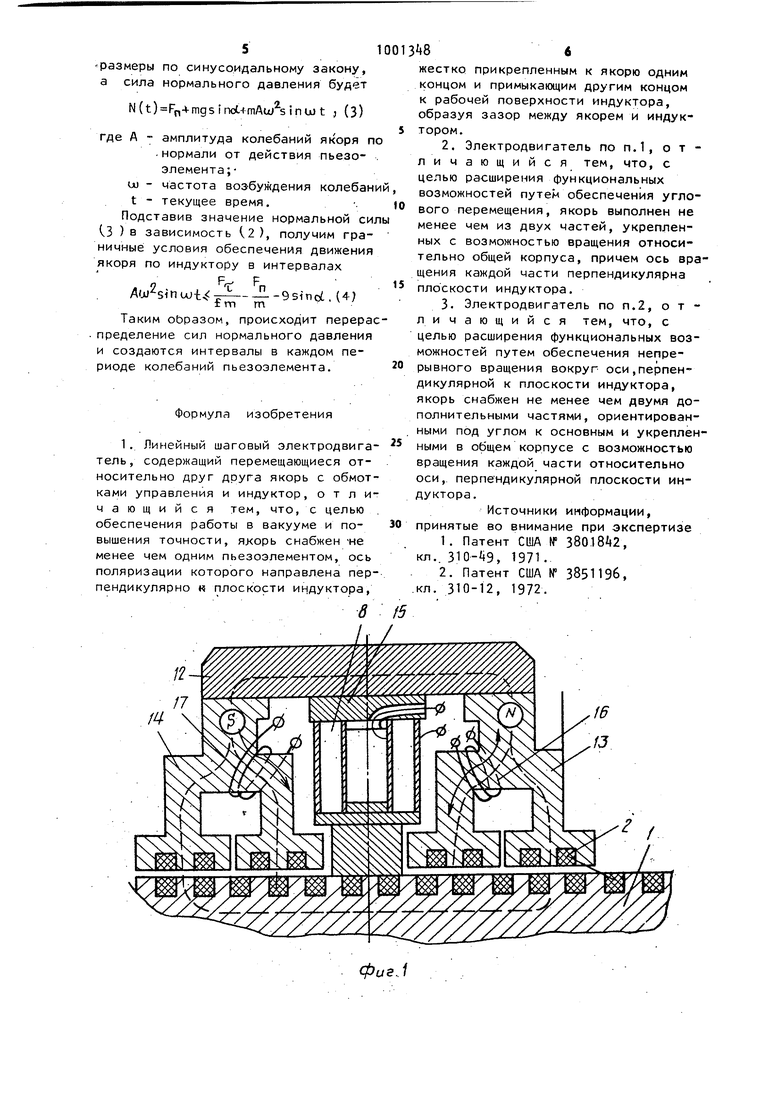
Изобретение относится к электрическим машинам, а именно к линейным шаговым двигателям, и может быть использовано в устройствах для перемещения исполнительных механизмов в плоскости с последующим позиционированием в заданном положении в различ ных газовых, радиоактивных и вакуумных средах. Известны шаговые электродвигатели для перемещения и позиционирования исполнительных механизмов, содержащие перемещающиеся относительно друг друга якорь с обмотками управления и безобмоточный зубчатый индуктор. Для перемещения якоря относительно индуктора и создания рабо чего зазора используются воздушные опоры t Наиболее близким к предлагаемому по. технической сущности является линейный шаговый электродвигатель, содержащий перемещающееся относитель но друг друга якорь с обмотками упра ления и индуктор. Здесь -также используются воздушные опоры 23К недостаткам известных двигателей следует отнести невозможность их работы в вакууме, а также ограниченные функциональные возможности по реализуемым траекториям движения. Цель изобретения - обеспечение работы двигателя в вакууме и повышение точности. Указанная цель достигается тем, что якорь снабжен не менее чем одним пьезоэлементом, ось поляризации которого направлена перпендикулярно к плоскости индуктора, жестко прикреп-, ленным к якорю одним концом и примыкающим другим концом к рабочей поверхности индуктора, образуя зазор между якорем и индуктором. Якорь выполнен не менее чем из двух частей, укрепленных с возможностью вращения относительно общего корпуса, причем ось вращения каждой части перпендикулярна плоскости индуктора. Якорь снабжен не менее чем двумя дополнительными частями, ориентированными под углом к основным и укрепленными в общем корпусе с возможностью вращения каждой части относительно оси, перпендикулярной плоскос ти индуктора. На фиг. 1 изображена пара магнитных полюсов с пьезоэлементом; на фиг. 2 - трехкоординатный шаговый электродвигатель, скомпонованный из четьфех одинаковых частей якоря, общий вид; на фиг. 3 - поворотный элемент одной части якоря, разрез. Линейный шаговый электродвигатель (фиг.1) содержит индуктор 1, выполненный в виде плиты из магнитомягкого материала. Вся поверхность плиты (АИг.2) разделена на три области А, В и С, отличающиеся друг от друга направлением нарезки зубцов. В средней части направление нарезки зу цов совпадает с направлением перемещения по координате X, а по краям в областях А и С зубцы нарезаны под углом к средней части и совпадают с направлением перемещения по координате У. Пазы всех зубцов заполнены эпоксиднь1м компаундом 2. Над поверхностью безобмоточного зубчатого индуктора 1 расположен якорь, который состоит из немагнитопроводящего корпуса 3 (фиг.2) и четы рех частей k-1 якоря, скрепленных с возможностью вращения относительно общего корпуса 3, причем ось вращени каждой части перпендикулярна плоскос ти индуктора 1. Каждая часть 4-7 яко ря представляет из себя конструкцию однокоординатного линейного шагового электродвигателя, собранного из m пар магнитных полюсов с пьезоэлементами 8 в немагнитопроводящем корпусе 9, поочередно сдвинутых на расстояние (z+-:)h относительно равноtnмерно нарезанных зубцов индуктора (где 2 - целое число зубцов; m - чис ло магнитных полюсов;h - шаг зубцового деления).На поверхность индукто ра якорь опирается только опорами 10, прикрепленными к одному концу пьезоэлемента 8, а между поверхностями ма нитных полюсов якоря и индуктора образован равномерный зазор по величин несколько больше величины размаха ко лебаний пьезоэлемента 8. Пьезоэлемен ты 8 установлены так, что их ось поляризации направлена перпендикулярно к плоскости индуктора 1. Корпус каждой части k-1 якоря соединен с общим корпусом 3 цилиндрической осью 11.по ходовой посадке. Пара магнитных полюсов выполнена в виде прикрепленных к магнитопроводящей планке 12 двух магнитных полюсов 13 и 1 специальной формы и пьезоэлемента 8 с токоизолирующей прокладкой 15(,фиг.2 и 3 ). Торцы магнитов 13 и 1 обращены к зубцам индуктора 1. Mai- ниты 13 и охвачены фазными обмотками 16 и 17, концы которых выведены на блок 18 управления. Электроды пьезоэлементов 8 соединены с выходом генератора синусоидальных колебаний, расположенного в корпусе блока 18 управления. Устройство работает следующим образом. При коммутации фазных обмоток 16 и 17 создаются электромагнитные силы, направленные перпендикулярно нарезке зубцов индуктора 1, тангенциальная составляющая F которых стремится сдвинуть якорь по поверхности индуктора 1, а нормальная F - прижать к нему. Без газовой подушки на поверхностях соприкасающихся частей якоря и индуктора возникают большие силы трения от действия нормальной силы, состоящей из гравитационных сил т и сил притяжения магнитов РП +fN qpf(Fp-fmq sinoi). сила трения; коэффициент трения; сила нормального давления; сила магнитного притяжения, направленная по нормали к поверхности индуктора;масса движущихся частей; ускорение свободного падения;угол между плоскостью индуктора и горизонтом. Для движения якоря по индуктору необходимо, чтобы сдвигающая сила F jэлектромагнита была больше сил тренияF p fN(t).. Если подключить Электроды пьезоэлементов 8 к синусоидальному переменному напряжению , то пьезоэлемент начинает соответственно изменять свои 5 Размеры по синусоидальному закону, а сила нормального давления будет N(t)Fp4mgsinoL4mAuj sinut , (З) где А - амплитуда колебаний якоря п нормали от действия пьезоэлемента;U) - частота воз-буждения колебан t - текущее время. .. Подставив значение нормальной си ДЗ )в зависимость (2), получим граничные условия обеспечения движения якоря по индуктору в интервалах ДА1Пи;-{:..991-пЫ,(4 Таким оЬразом, происходит перера пределение сил нормального давления и создаются интервалы в каждом периоде колебаний пьезоэлемента. Формула изобретения 1. Линейный шаговый электродвигатель, содержащий перемещающиеся относительно друг друга якорь с обмотками управления и индуктор, отличающийся тем, что, с целью обеспечения работы в вакууме и повышения точности, якорь снабжен не менее чем одним пьезоэлементом, ось поляризации которого направлена перпендикулярно « плоскости индуктора.
Фиг..1 86 жестко прикрепленным к якорю одним концом и примыкающим другим концом к рабочей поверхности индуктора, образуя зазор между якорем и индуктором. 2.Электродвигатель по п.1, от личающийся тем, что, с целью расширения функциональных возможностей путем обеспечения углового перемещения, якорь выполнен не менее чем из двух частей, укрепленных с возможностью вращения относительно общей корпуса, причем ось вращения каждой части перпендикулярна плоскости индуктора. 3.Электродвигатель по п.2, отличающийся тем, что, с целью расширения функциональных возможностей путем обеспечения непрерывного вращения вокруг оси,перпендикулярной к плоскости индуктора, якорь снабжен не менее чем двумя дополнительными частями, ориентированными под углом к основным и укрепленными в общем корпусе с возможностью вращения каждой части относительно оси, перпендикулярной плоскости индуктора. Источники информации, принятые во внимание при экспертизе 1 . Патент США № 380l8ii2, кл.. 310-fi9, 1971 . 2. Патент США № 3851196, л. 310-12, 1972.
| название | год | авторы | номер документа |
|---|---|---|---|
| Двухкоординатный шаговый электродвигатель | 1977 |
|
SU657539A1 |
| Линейный шаговый электродвигатель | 1972 |
|
SU504278A1 |
| Многокоординатный шаговый электродвигатель | 1983 |
|
SU1119131A1 |
| ЛИНЕЙНЫЙ ШАГОВЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1990 |
|
RU2030079C1 |
| Многокоординатный шаговый электродвигатель | 1982 |
|
SU1080240A1 |
| Линейный шаговый электродвигатель | 1978 |
|
SU752656A1 |
| Двухкоординатный шаговый электродвигатель | 1975 |
|
SU577616A1 |
| Двухкоординатный шаговый электродвигатель | 1983 |
|
SU1201971A1 |
| Многофазный линейный шаговый двигатель | 1981 |
|
SU1001349A1 |
| Линейный электродвигатель | 1979 |
|
SU805474A1 |