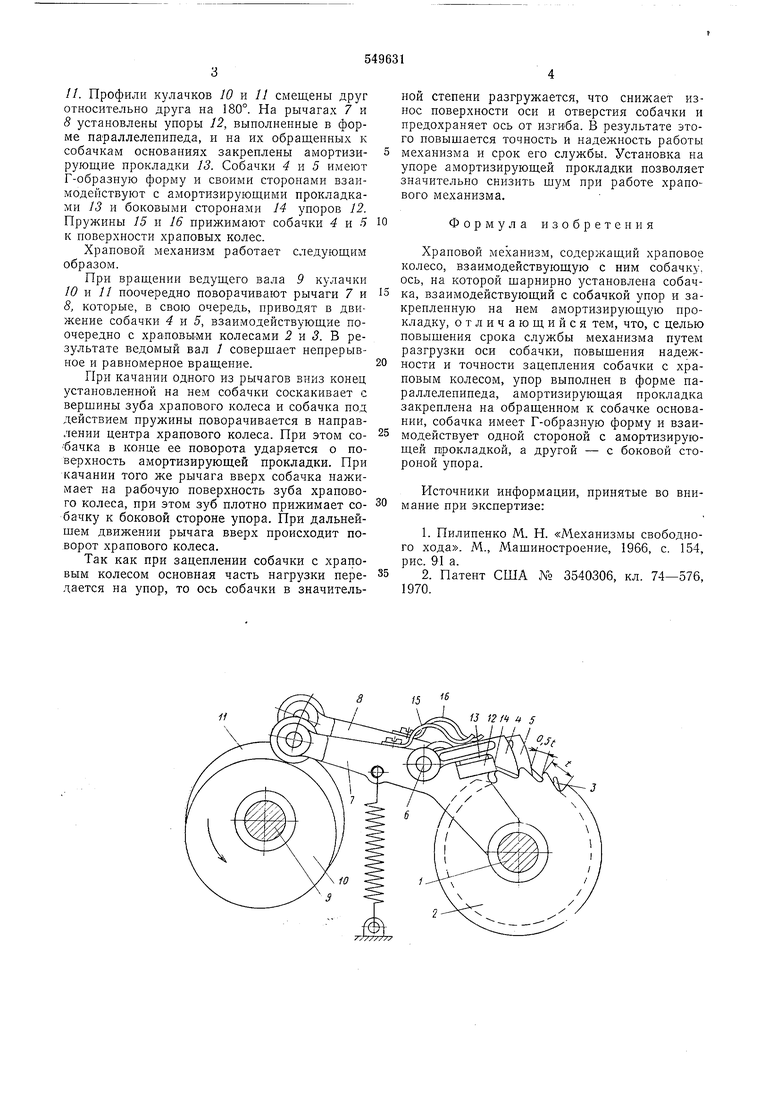
//. Профили кулачков 10 и // смещены друг относительно друга на 180°. На рычагах 7 и 8 установлены уиоры 12, выполненные в форме параллелепипеда, и на их обращенных к собачкам основаниях закреплены амортизирующие прокладки 13. Собачки 4 и 5 имеют Г-образиую форму и своими сторонами взаимодействуют с амортизирующими прокладками 13 и боковыми сторонами 14 упоров 12. Пружины 15 и 16 прижимают собачки 4 и 5 к поверхности храповых колес.
Храповой механизм работает следующим образом.
При вращении ведущего вала 9 кулачки /( и 11 поочередно поворачивают рычаги 7 и 8, которые, в свою очередь, приводят в движение собачки и 5, взаимодействующие поочередно с храловЫМИ колесами 2 и 5. В результате ведомый вал 1 совершает непрерывное и равномерное вращение.
При качании одного из рычагов вниз конец установленной на нем собачки соскакивает с вершины зуба храпового колеса и собачка под действием пружины поворачивается в направлении центра храпового колеса. При этом собачка в конце ее поворота ударяется о поверхность амортизирующей прокладки. При качании того же рычага вверх собачка нажимает на рабочую поверхность зуба храпового колеса, при этом зуб плотно прижимает собачку к боковой стороне упора. При дальнейшем движении рычага вверх происходит поворот храпового колеса.
Так как при зацеплении собачки с храповым колесом основная часть нагрузки передается иа упор, то ось собачки в значительиои степени разгружается, что снижает изиос поверхности оси и отверстия собачки и предохраняет ось от изгиба. В результате этого повышается точность и надежность работы механизма и срок его службы. Установка на упоре амортизирующей прокладки позволяет значительно снизить шум при работе храпового механизма.
Формула изобретения
Храповой механизм, содержащий храповое колесо, взаимодействующую с ним собачку, ось, на которой шарнирно установлена собачка, взаимодействующий с собачкой упор и закрепленную на нем амортизирующую прокладку, отличающийся тем, что, с целью повышения срока службы механизма путем разгрузки оси собачки, повышения надежности и точности зацепления собачки с храповым колесом, упор выполнен в форме параллелепипеда, амортизирующая прокладка закреплена на обращенном к собачке основании, собачка имеет Г-образную форму и взаимодействует одной стороной с амортизирующей прокладкой, а другой - с боковой стороной упора.
Источники информации, принятые во внимание при экспертизе:
1.Пилипенко М. П. «Механизмы свободного хода. М., Машиностроение, 1966, с. 154, рис. 91 а.
2.Патент США № 3540306, кл. 74-576, 1970.
| название | год | авторы | номер документа |
|---|---|---|---|
| РЕВЕРСИВНЫЙ ПРИВОД | 1991 |
|
RU2064620C1 |
| Устройство смены рисунка по утку к бесчелночному ткацкому станку | 1983 |
|
SU1170015A1 |
| Устройство для гибки деталей | 1985 |
|
SU1360849A2 |
| Ручная лебедка | 1989 |
|
SU1698178A1 |
| Устройство для контактной точечной сварки | 1977 |
|
SU715253A1 |
| ГИДРАВЛИЧЕСКИЙ ГАЙКОВЕРТ | 2014 |
|
RU2572918C1 |
| Аварийное тормозное устройство | 1986 |
|
SU1342787A1 |
| Аварийно-запирающееся втягивающее устройство для ремня безопасности транспортного средства | 1984 |
|
SU1426445A3 |
| Храповой механизм | 1971 |
|
SU533785A1 |
| Станок для насекания рашпилей прямой и полукруглой формы | 1972 |
|
SU443731A1 |
