Изобретение относится к области автоматики и вычислительной техники и предназначено для иснользовання в системах числового программного управления производственными машинами, в частности роботами-маиипуляторами.
Известно устройство для позиционного программного управления, содержаш,ее блок ввода, соединепный через дешифратор и распределитель с декадами счетчика, датчик импульсов, выход которого подключен к счет)1ому входу счетчика, и схему равноз-начпости, связанную с блоком управления приводом 1.
Иедостатком этого устройства является отсутствие автоматического выбора точки снижения скорости в зависимости от величины неремещеиия исполаительного органа.
Наиболее близким техн-ическнм решением к данному изобретению является устройство для позициоииого программного управления, содержащее последовательно соединенные регистр заданной координаты, блок сравнения коордииат, задатчик импул1 сов, блок управ.чеиия приводом, а также счетчик текущей координаты, выход которого соединен с одним из входов блока сравнения координат, и реверсивный счетчик, выход которого соединен с одним из входов задатчика импульсов 2. В этом устройстве определение начала торможения осуществляется путем занесения в /(-и
разряд счетчика текущей координаты фиксированного числа импульсов от специального геиератора и сравнения пр.и этом содержимого этого счетчика с регистром задаииой координаты.
Недостатком такого устройства является то, что в счетчик текущей коордипаты заводятся фи ксированное число дополнительных
импульсов, в результате чего участок торможения также фиксирован, что возможно лнщь при позиционировании на одной определенной скорости. В ряде случаев, иаприл1ер при ун)аплении механизмами тина промыщлепных
роботов, скорость перемеи1.еиия при позиционировании должна иметь различные значения, для чего необходимо наличие специального генератора фиксированного числа импульсов, что усложняет устройство.
Цель изобретения - упрощение устройства - достигается тем, что устройство содержит множитель числа импульсов и коммутатор, первый вход которого подключен к выходу задатчика импульсов, второй вход - к
выходу блока сравнения координат, первый выход коммутатора подключен к первому входу реверсивного счетчика и через умножитель числа импульсов к первому входу счетчика текущей координаты, второй выход коммутатора подключен ко второму входу счетчика текущей координаты, а третий выход - ко второму входу реверсивного счетчика.
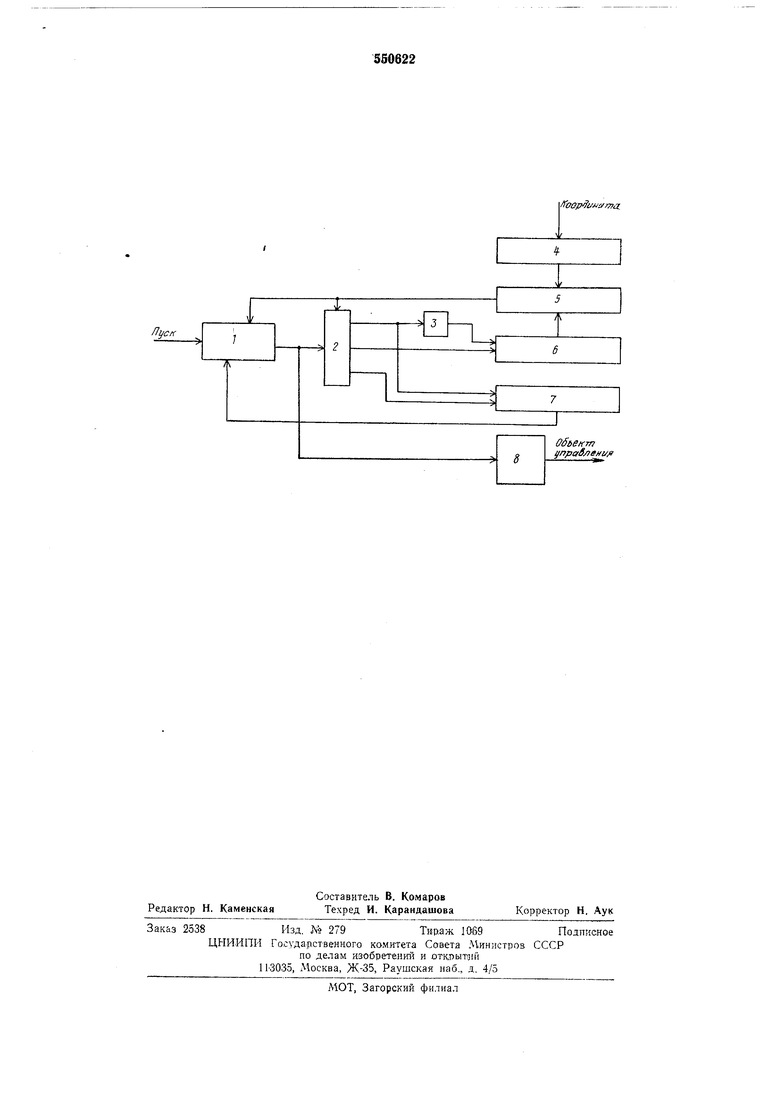
На чертеже представлена блок-схема предлагаемого устройства.
Устройство содержит задатчик импульсов 1, коммутатор 2, умножитель числа имнульсов 3, регистр заданной координаты 4, блок сравнения координат 5, счетчик текущей координаты 6, реверсивный счетчик 7 и блок управления приводом 8.
Устройство работает следующим образом.
В регистр заданной координаты 4 заводится от программы величина заданной координаты исполнительиого механизма (на чертеже не показая). В счетчике текущей координаты 6 хранится текущая координата этого механизма. По сигналу «пуск задатчик импульсов начинает вырабатывать импульсы, работая последовательно в трех режимах. В режиме разгона частота импульсов плавно возрастает по определенному закону до установленной частоты. В режнме равномерного перемещения частота импульсов равна установлеп 1ой и не изменяется. В режиме торможения частота импульсов уменьщается по тому же закону, что и при разгоне.
Импульсы от задатчика импульсов 1 пода отся на блок управления приводом 8 и коммутатор 2, который обеспечивает коммутацию импульсов в соответствии с режимом работы задатчика импульсов 1. В режиме разгона импульсы от коммутатора подаются на вход умножителя импульсов 3 и па суммирующий вход реверсивного счетчика 7, а с выхода умножителя импульсов на счетчик текущей координаты 6. По окончании разгона в реверсивном счетчике 7 окажется число импульсов, соответствующее участку разгона, а в счетчике текущей координаты 6-велнчина, больП1ая действительной текунлей координаты на величину участка разгоиа, так как на блок управления приводом 8 было подаио количество импульсов, соответствующее участку разго.на, -а в счетчнК текущей координаты 6 удвоенное их количество.
По заверщеиии режима разгоиа коммутатор 2 выдает импульсы только по каналу, соответствующему режиму равномерного перемеи1ения, которые подаются иепосредственно на вход счетчика текущей координаты 6.
Поскольку содержимое счетчика текущей координаты 6 больще действительного значения текущей координаты на велнчину участка разгоиа, блок сравнения координат 5, выдает сигнал равенства координат в то время, когда остаток перемещения равен участку разгона. Этот включает режим торможения в задатчнке импульсов 1, а коммутатор 2 начинает выдавать импульсы но соответствуюп1,ему каналу. Импульсы по этому капалу поступают только иа вход вычитания реверсивного счетчика 7 и, когда их количество станет равным количеству импульсов, поступивших на этот счетчик в режиме разгона, счетчик окажется в состоянии иоль.
Сигнал о достиженин этого состояния прекращает работу задатчика импульсов 1 и дальнейщее поступление импульсов прекращается. При этом количество имиульсов, поступивших на блок управления приводом 8, будет равно количеству импульсов, поступивН1ИХ на счетчик текущей координаты 6, а содержимое этого счетчика соответствует действительному положению рабочего органа.
В нредлагаемом устройстве участок торможения автоматически формируется без специального генератора импульсов, что упрощает и удешевляет конструкцию устройства па 5%. Кроме того появляется возможность вести позиционирование на любой выбранной скорости, что увеличивает производительность
оборудования на 5%.
Формула и 3 о б р е т с и и я
Устройство для нозиционного программного унравлення, содержащее последовательно соединеиные регистр заданной координаты, блок сравнения координат, задатчнк нмпульсов, блок управления приводом, а также счетчик текущей координаты, выход которого соединен с одним из входов блока сравнения координат, и реверсивный счетчик, выход которого соединен с одним из входов задатчика импульсов, отличающееся тем, что, с целью упрощения устройства, оно содержит
умножитель числа импульсов и коммутатор, первый вход которого подключен к выходу задатчика импульсов, второй вход - к выходу блока сравнения координат, первый выход коммутатора подключен к нервому входу реверсивного счетчнка и через умножитель числа импульсов - к нервому входу счетчика текущей координаты, второй выход коммутатора подключен ко второму входу счетчнка текущей координаты, а третий выход - ко
второму входу реверсивного счетчнка.
Источники информации, принятые во внимание при экспертизе:
1. Авторское свидетельство СССР № 424 И 7, М. Кл.2 G 05В 19/18, 1972 г.
2. Авторское свидетельство СССР № 309352, М. Кл.2 G 05 В 19/18, 1969 г.
/ioi}f 4iffjy7 a.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для кинематического дробления стружки на токарных станках с числовым программным управлением | 1981 |
|
SU1004974A1 |
| Устройство для программного управления скоростью подачи | 1982 |
|
SU1067473A1 |
| ЛИНЕЙНО-КРУГОВОЙ ИНТЕРПОЛЯТОР | 1991 |
|
RU2010293C1 |
| Устройство для управления скоростными режимами перемоточного станка | 1984 |
|
SU1236037A1 |
| Устройство для контроля программ на координатографе | 1983 |
|
SU1149219A1 |
| Устройство для цифрового позиционного управления | 1982 |
|
SU1084740A1 |
| Устройство для программного счета изделий | 1983 |
|
SU1113824A1 |
| Цифровая система регулирования скорости центробежного аппарата | 1983 |
|
SU1176302A1 |
| Устройство для автоматического регулирования натяжения длинномерного материала при перемотке | 1985 |
|
SU1341138A1 |
| Устройство для управления механизмом сброса прутков на холодильник сортового стана | 1976 |
|
SU595027A1 |