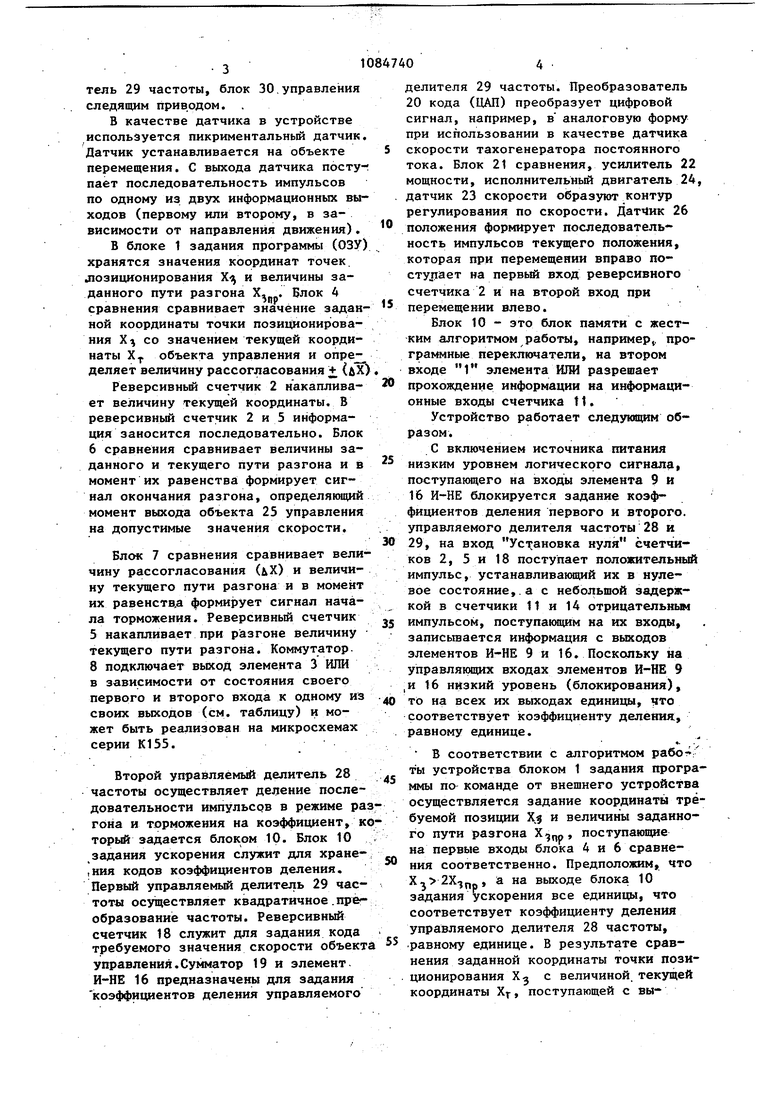
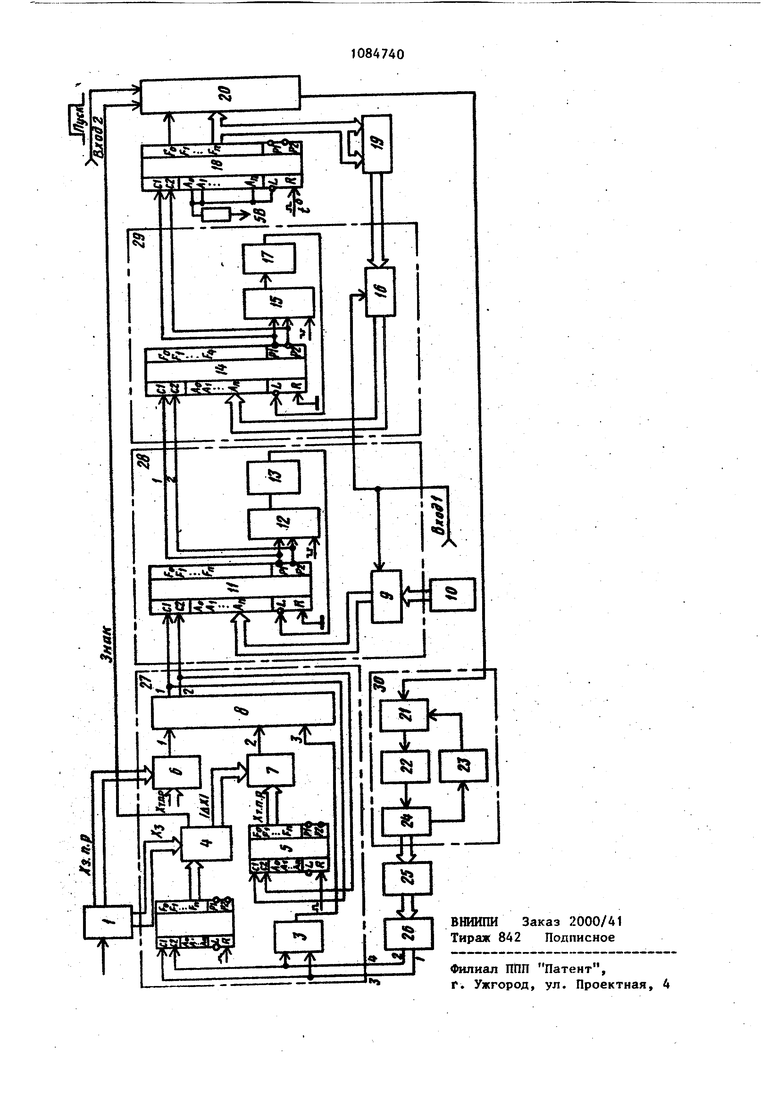
Изобретение относится к цифровым позиционным устройствам управления и может быть использовано в различных системах автоматического управления, применяемых в самых различных областях промьшленности. Известна цифровая система управления, содержащая последовательно соединенные задающее устройство, сравнивающее устройство (сумматор), регистр управления, преобразователь код-напряжение, корректирующее устройство , усилительно-преобразователь ное устройство, исполнительный двига тель, механически связанный через редуктор с кодовым датчиком, выход которого подключен к входу ср;авнивающего устройства и блока синхронизации l Недостатком данной системы управления является возможность перерегулирования, так как к исполнительному двигателю прикладывается напряжение зависящее от величины рассогласовани Наиболее близким к предлагаемому является устройство,для торможения позиционного привода, содержащее последовательно соединенные блок задания прогрггммы, регулятор положения (первый блок сравнения), управляемый делитель частоты,счётчик,блок управления следящим приводом (второй блок сравнения, датчик скорости, уси литель мощности, исполнительный дайгатель), датчик пути, выходом подклк ченный к входу регулятора положения 2 . Недостатками известного устройств являются узкий класс решаемых задач и сложность технической реализации. Это обусловлено тем, что; момент начала торможения определяется моментом равенства оставщегося пути перемещения заранее определенному зна чению пути торможения,а поэтому такие устройства могут быть использованы только для управления объектами, величина перемещения которых больще удвоенного пути разгона и которые исключают возможность возникновения перерегулирования, для точного воспроизведения заданной зависимости фазовых координат системы необходимо задать N точек переключения,предварительно рассчитав код координаты каждой точки; для перехода к новой зависимости фазовых координат системы необходимо заново рассчитать коды координат каждой точки переключения. Цель изобретения - повьщ1ение точности устройства. Указанная цель достигается тем, что в устройство для цифрового позиционного управления, содержащее блок задания программы, датчик положения, подключенный выходами к первому входу регулятора положения, первый выход KOTopo.ro через преобразователь кода соединен с входом блока управления ,следящим приводом, и первый управляемый делитель частоты, введены второй .управляемьп делитель частоты, реверсивньп{ счетчик, блок задания ускорения и сумматор, подключенный выходами к первым входам первого управ немого делителя частоты, вторые входы которого соединены с вькодами второго управляемого делителя частоты, подключенного первыми входами к вторым выходам регулятора положения, вторыми входами - к выходам,блока задания ускорения, третьими входами к первому входу устройства, входы сумматора соединены с выходами реверсивного счетчика, первый и второй выходы блока задания программы соединены с вторым и третьим входами регулятора положения соответственно, а вход блока задания программы - со вторым входом устройства, третий ВХОД которого подключен ко второму входу преобразователя кода, третьи входы которого соединены с выходами реверсивного счетчика. На чертеже представлена блок-схема предлагаемого устройства. Устройстро включает блок 1 задания программы, реверсивный счетчик 2, элемент ИЛИ 3, блок 4 сравнения, реверсивный счетчик 5, блок 6 сравнения, блок 7 сравнения, коммутатор 8, элемент И-НЕ 9, блок 10 задания ускорен 1я, реверсивный счетчик 11, элемент ИЛИ 12, элемент 13 задержки, реверсивный счетчик 14, элемент ИЛИ 15, элемент И-НЕ 16, элемент 17 задержки, реверсивный счетчик 18, сумматор 19, преобразователь 20 кода, блок 21 сравненияу усилитель 22 мощности, датчик 23 скорости, исполнительный двигатель 24, объект 25 управления, датчик 26 положения, регулятор 27 положения, второй управляемый делитель 28 частоты, первьп1 управляемый дели-. тель 29 частоты, блок 30.управления следящим приводом. В качестве датчика в устройстве используется пикриментальный датчик Датчик устанавливается на объекте перемещения. С выхода датчика постуг пает последовательность импульсов по одному из двух информационных выходов (первому или второму, в зависимости от направления движения). В блоке 1 задания программы (ОЗУ хранятся значения координат точек, лозиционирования Х и величины заданного пути разгона Х.„. Блок 4 сравнения сравнивает значение задан ной координаты точки позиционирования Х со значением текущей координаты Х объекта управления и определяет величину рассогласования (йХ Реверсивный счетчик 2 накапливает величину текущей координаты. В реверсивный счетчик 2 и 5 информация заносится последовательно. Блок 6 сравнения сравнивает величины заданного и текущего пути разгона и в момент их равенства формирует сигнал окончания разгона, определяющий момент выхода объекта 25 управления на допустимые значения скорости. Блок 7 сравнения сравнивает вели чину рассогласования (лХ) и величину текущего пути разгона и в момент их равенства формирует сигнал начала торможения. Реверсивный счетчик 5 накапливает при разгоне величину текущего пути разгона. Коммутатор. 8 подключает выход элемента 3 ИЛИ в зависимости от состояния своего первого и второго входа к одному из своих выходов (см. таблицу) и может быть реализован на микросхемах серии К155. Второй управляемый делитель 28 частоты осуществляет деление последовательности импульсов в режиме ра гона и торможения на коэффициент, к торый задается блоком 10. Блок 10 задания ускорения служит для хране,ния кодов козффициентов деления. Первый управляемый делитель 29 частоты осуществляет квадратичное. пртвобразование частоты. Реверсивный счетчик 18 служит для задания кода требуемого значения скорости объект управления.Сумматор 19 и элемент. И-НЕ 16 предназначень для задания коэффициентов деления управляемого делителя 29 частоты. Преобразователь 20 кода (ЦАП) преобразует цифровой сигнал, например, в аналоговую форму при использовании в качестве датчика скорости тахогенератора постоянного тока. Блок 21 сравнения, усилитель 22 мощности, исполнительный двигатель 24, датчик 23 скорости образуют контур регулирования по скорости. Датчик 26 положения формирует последовательность импульсов текущего положения, которая при перемещении вправо посту тает на первый вход реверсивного счетчика 2 и на второй вход при перемещении влево. Блок 10 - это блок памяти с жестким алгоритмом работы, например,, программные переключатели, на втором входе 1 элемента ИЛИ разрешает прохождение информации на информационные входы счетчика 11. Устройство работает следукицим образом. С включением источника питания низким уровнем логического сигнала, поступающего на входы элемента 9 и 16 И-НЕ блокируется задание коэффициентов деления первого и второго, управляемого делителя частоты 28 и 29, на вход Уст:ановка нуля счетчиков 2, 5 и 18 поступает положительный импульс, устанавливающий их в нулевое состояние,.а с небольщой задержкой в счетчики 11 и 14 отрицательным импульсом, поступакицим на их входы, записывается информация с выходов элементов И-НЕ 9 и 16. Поскольку на управлякицих входах элементов И-НЕ 9 и 16 низкий уровень (блокирования), то на всех их выходах единицы, что соответствует коэффициенту деления, равному единице. В соответствии с алгоритмом ты устройства блоком 1 задания программы по команде от внешнего устройства осуществляется задание координаты требуемой позиции Х. и величины заданного пути разгона , поступающие на первые входы блока 4 и 6 сравнения соответственно. Предположим, что Х,2Хзг,р и на вькоде блока 10 задания ускорения все единицы, что соответствует коэффициенту деления управляемого делителя 28 частоты, .равному единице. В результате сравнения заданной координаты точки позиционирования Х с величиной, текущей координаты XT, поступающей с выхода реверсивного счетчика 2, на выходе блока 4 сравнения появится код величины разности, знйк которой опре деляет направление перемещения объек та 25 управления и поступает на первйй вход преобразователя 20 кода. Абсолютная величина разности (лХ) поступает на первый вход блока 7 сравнения, на второй вход которого поступает величина текущего значения пути разгона X v , равного в нулевой момент времени нулю. В результате их сравнения на выходе блока 7 сравнения появится низкий уровень сигнала управления коммутатором 8. В блбке 6 сравнения сравниваются величины заданного текущего пути разгона. В результате на выходе блока 6 сравнения появится ни кий уровень. Таким образом, на входе коммутатора 8 устанавливается код 00, собтветствующий подключению выхода элемента ИЛИ 3 к своему перво му выходу, что соответствует режиму разгона. Поступающая 1 от внешнего устройства на вход элементов И-НЕ 9 и 16 снижает блокировку, а положительный уровень, поступающий на второй вход преобразователя 20 кода осуществляет задание первой сту пени скорости объекта 25 управления (высокий уровень на втором входе преобразователя хранится до момента поступления первого импульса на счет вход счетчика 18) Г В реэультате на выходе блока 21 сравнения появляется разностный сигнал, приводящий в движение объект 25 управления в соответствии с определенным блоком 4 сравнения направлением перемещения. Датчик 26 положения в зависимости от действительного направления перемещения объекта 25 управления формирует последовательность импульсов походному из своих выходов например по первому. Импульсы от дат чика положения поступают на вход Прямой счет счетчика 2, увеличива от его содержание и через элемент ИЛИ 3, первый выход коммутатора поступают на вход Прямой счет счетчика 11. Так как в счетчике 11 записаны все единицы, то первый импульс на его счетном входе форми ует на выходе Прямой перенос Р 1 отрицательный импульс, который поступает на вход Прямой счет счетчика 14 и с небольшой задержкой осуществляет запись коэффициента дапения, хранящегося в блоке 10 задания ускорения. Поскольку в счетчике 14 записаны все единицы, то первый импульс на-его входе Прямой счёт проходит на выход Прямой перенос Р1, который поступает на входПрямой счет счетчика 18 и устанавливает в нем число равное единице (код О ... 0001), что соответствует первой ступени задания скорости. Код О ... 0001 поступает на третий вход преобразователя 20 кода и на первый, второй входы сумматора 19, выполнякяцего функцию умножения на два (ах 2). Результат умножения госредством элемента 16 И-НЕ инвертируется и поступает на информационные входы АО ... АН счетчика 14, и задержанным импульсом с выхода элемента 7 задержки записывается в счетчик 14. по мере перемещения объекта 25 управления последующие импульсы от 26 положения аналогичньп. об-; разом проходят через элемент ИЛИ 3, коммутатор 8 и счетчик 11 на вход Прямой счет счетчика 14. В момент прихода четвертого импульса на выходе переноса Pi счетчика 14 появляется второй импульс, который устанавливавает в счетчике 18 код О ... 00010, соответствующий второй ступени скорости перемещения объекта 25 управления и коду 1... 1011 на входах Ао.. Ап счетчика 14 и .с небольшой задержкой осуществляет параллельную запись в счетчике 14 кода 1 ... 1011. В этом случае импульс переноса на выходе Pj счетчика 14 появится в момент поступления девятого импульса на его счетный вход. Импульс переноса поступает на счетный вход Прямой счет счетчика 18 и устанавливает в нем число О ... 0011, соответствующее третьей ступени задания скорости объекта 25 управления. После умножения на 2 числа. О ... 0011 и его инвертирования на входы АО ... Ап счетчика 14 поступает число 1 ... 1001, которое заноснтся в счетчик 14 третьим импульсом с выхода переноса. Четвертая ступень задания скорости перемещения объекта 25 управления будет установлена в момент прихода 16-го импульса на счетный вход счетчика 14, патая - в момент прихода 25-го, шестая - в момент прихода 36-го, седьмая - в момент прихода 49-го и т.д.
В момент равенства величины текущего пути разгона -Х,« величине заданного значения пути разгона Х,„. на выходе блока 6 сравнения устанавливается высокий уровень который отключает третий вход коммутатора 8 от его выходов, что соответствует переходу объекта 25 управления на режим движения с -постоянной скорость Импульсы от датчика 26 положения про должают поступать на счетный вход счетчика 2 и в момент равенства оставшейся величины перемещения текущему пути разгона, на выходе блока 7 появляется высокий уровень, который подключает выход элемента ИЛИ 3 / ко второму выходу коммутатора 8. Начинается режим торможения, который проходит в обратной последовательности режиму разгола. Если же величина перемещения меньше либо равна удвоенному заданному пути разгона, то движение объекта 25 управления происходит без движения с постоянной скоростью по треугольному isaijpHy изменения скорости.
Если же коэффициент деления управляемого делителя 28 частоты больше единицы, то это приводит к уменьшению ускорения объекта 25 управле.ния,
В предлагаемом устройстве пере.ход к новому соотношению фазовых
координат достигается посредством изменения коэффициента деления второго управляемого делителя частоты и величины заданного пути разгона, возможность перемещения на величину меньше, либо равную удвоенной величине заданного пути перемещения позволяет при возникновении перерегулирования отрабатывать его в ичину;
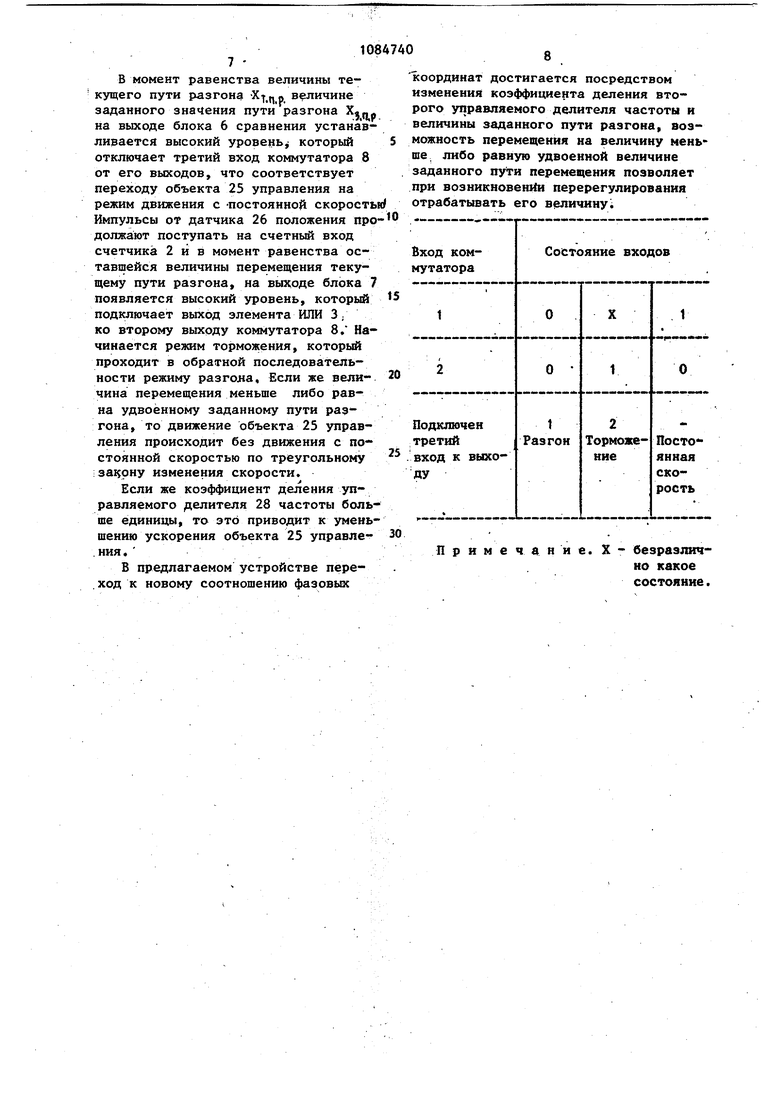
Вход комСостояние входов мутатора
Примечание. X безразлично какое состояние.
| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровое устройство для управления позиционным приводом | 1970 |
|
SU911459A1 |
| Программно-управляемый модуль | 1986 |
|
SU1327066A1 |
| Программно-управляемый модуль | 1986 |
|
SU1327060A1 |
| Программно-управляемый модуль | 1986 |
|
SU1403018A1 |
| Программно-управляемый модуль | 1986 |
|
SU1405028A1 |
| Модуль для программного управления электроприводом | 1987 |
|
SU1509832A1 |
| Система программного управления | 1979 |
|
SU817669A1 |
| Электропривод переменного тока | 1979 |
|
SU961087A1 |
| Устройство управления позиционированием | 1987 |
|
SU1462248A1 |
| Цифровая система управления | 1984 |
|
SU1234811A1 |
УСТРОЙСТВО для ЦИФРОВОГО ПОЗИЦИОННОГО УПРАВЛЕНИЯ, содержащее блок задания программы, датчик положения, подключенный выходами к первому входу регулятора положения, первый выход которого через преобразователь кода соединен с входом блока управления следящим приводом, и первый управляемый делитель частоты, о тличающееся тем, что, с целью повышения точности устройства, в него введены второй управляемый делитель частоты, реверсивный счетчик, .блок задания ускорения и сумматор, подключенный.выходами к первым входам первого управляемого делителя частоты, вторые входы которого соединены с выходами второго упраиляеМого делителя частоты, подключенного п врвыми входами ко вторым выходам регулятора положения, вторыми входами - к выходам блока задания ускорения, третьими входами - к первому вкоду устройства, входы сумматора соединены с вькодами реверсивного счётчика, первый и второй выходы блока задания программы соединены со вторым и третьим входами регулятора положе / ния соответственно, а вход блока задания программы - со вторым входом устС ройства, третий вход которого подключен ко второму входу преобразователя С кода, третьи входы которого соедине.ны с выходами реверсивного счетчика.