1
Изобретение относится к области автоматики и измерительной техники.
Известны индукционные датчики положения, типа индуктосин, содержащие tti - фазный ротор, и - фазный статор и печатные обмотки, нанесенные на основания - подложки ротора и статора 1 .
Однако эти датчики в ряде случаев не удовлетворяют точности измерения.
Наиболее близким техническим решением является многофазный индукционный датчик, содержащий m - фазный ротор П - фазный статор и печатные обмотки, нанесенные на основания - подложки ротора и статора, в которых с целью повыщения точности применяют специальные схемы, содержащие фазовращающий контур на RC - цепочках, подключенных параллельно фазам двухфазной выходной обмотки датчика, причем нагрузка подключена к средним точкам RCцепочек .
Однако такие датчики недостаточно уменьшают систематическую погрешность от вьющих гармоник, а также отличаются достаточной слолшостью при регулировке и при подборе RC - цепей.
Для повышения точности датчика фазные обмотки ротора смещены в пространстве относительно друг друга на величину Т/in а фазные обмотки статора смешены в пространстве относительно друг друга на величину Т / Т1 , где Т -шаг обмотки индукционного датчика, равный двойному полюсному делению.
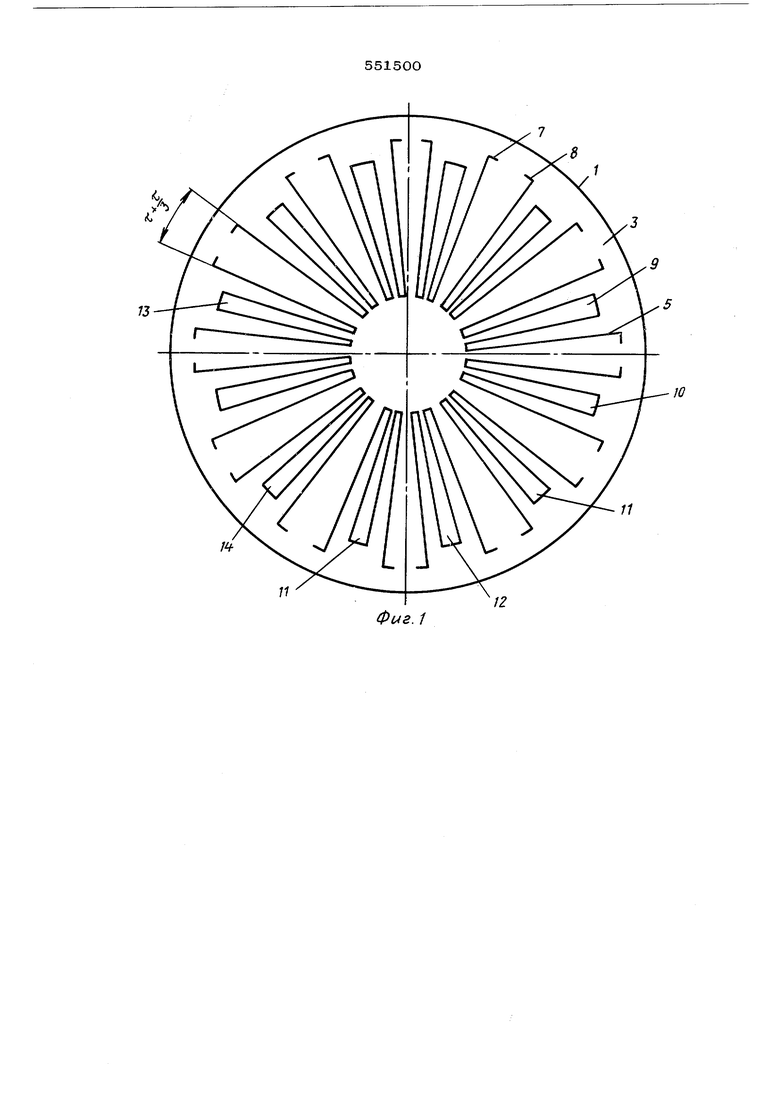
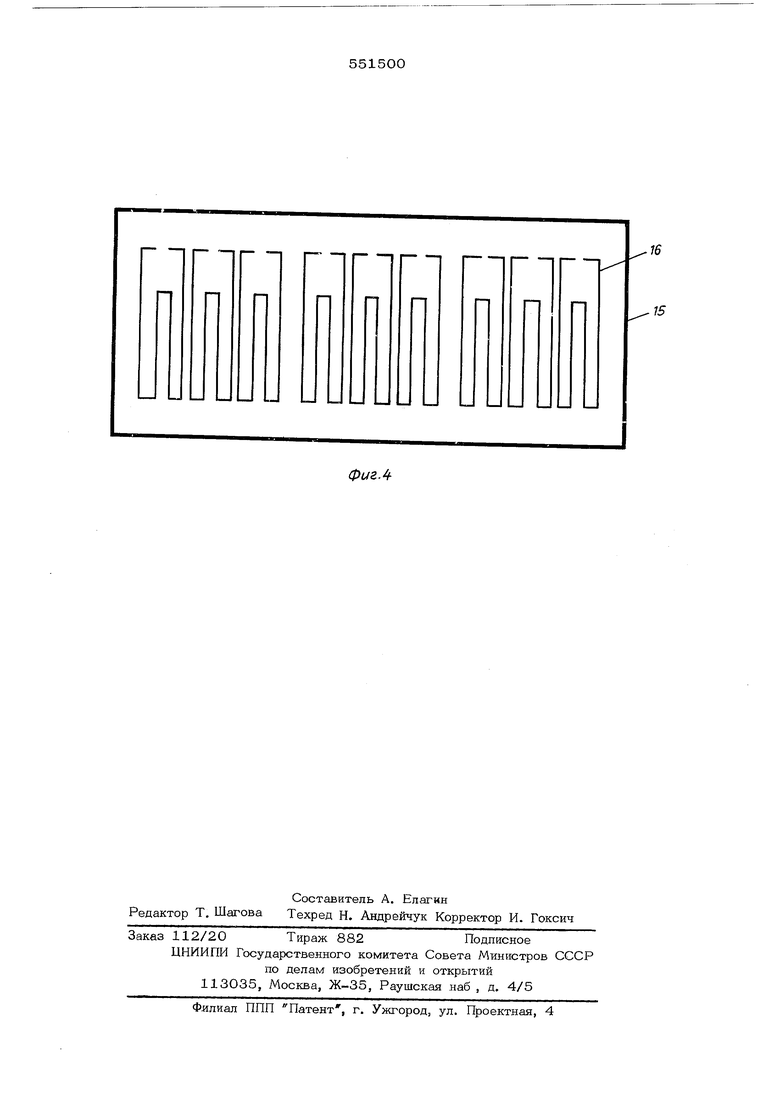
На фиг. 1 дана скема обмотки трехфазного секционированного статора; на фиг. 2 схема обмотки двухфазного несекционированного ротора поворотного торцового индуктосина; на фиг. 3 - схема обмотки двухфазной несекционированной линейки; на фиг. 4 - схема обмотки трехфазного бегунка линейного индуктосина.
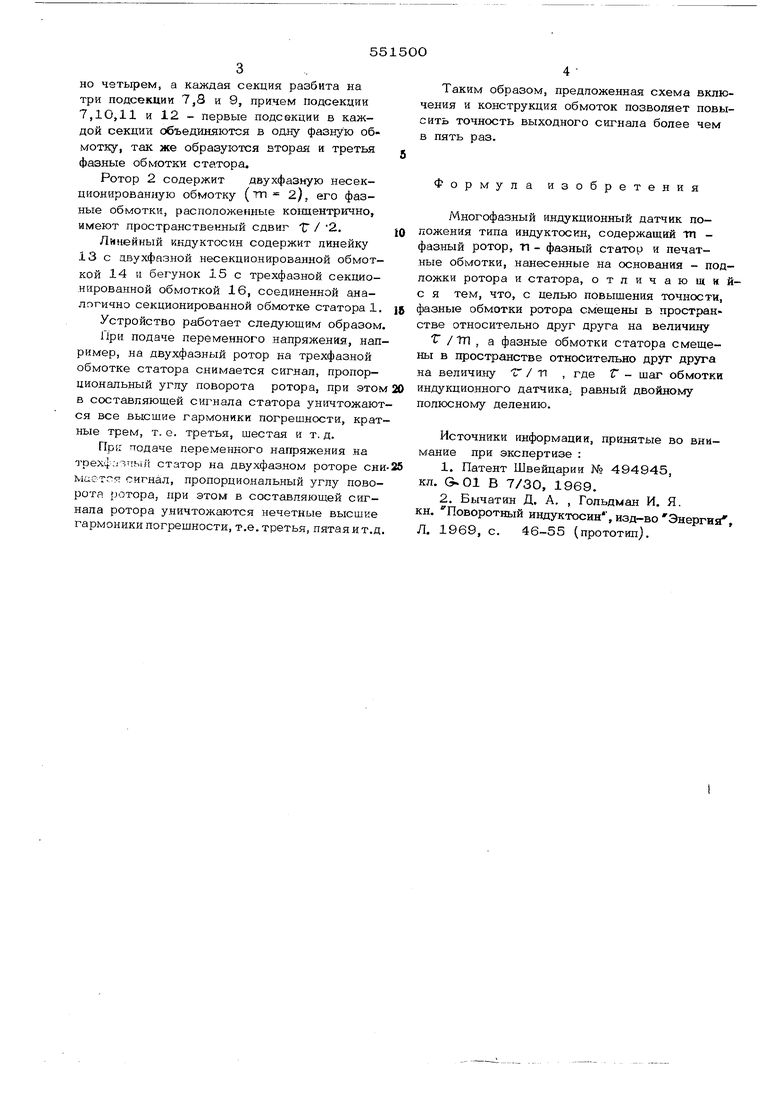
Поворотный торцовой индуктосин содержит статор 1 и ротор 2. На основании-подложке 3 статора и подложке 4 ротора нанесены соответственно печатные обмотки 5 и 6.
Статор 1 выполнен трехфазным секционированным (П З), число секций его равно четырем, а каждая секция разбита на три подсекции 7,8 и 9, причем подсекции 7,10,11 и 12 - первые подсекции в каждой секции объединяются в одну фазную обмотку, так же образуются вторая н третья фазные обмотки статора.
Ротор 2 содержит двухфазную несекционированную обмотку (тп 2), его фазные обмотки, расположенные ко1шентрично, имеют пространственный сдвиг Г / 2.
Линейный индуктосин содержит линейку 13 с двухфазной несекционированной обмоткой 14 я бегунок 15 с трехфазной секционированной обмоткой 16, соединенной аналогично секционированной обмотке статора.
Устройство работает следующим образом.
При подаче переменного напряжения, например, на двухфазный ротор на трехфазной обмотке статора снимается сигнал, пропорциональный углу поворота ротора, при этом в составляющей сигнала статора уничтожаются все высшие гармоники погрешности, кратные трем, т. е. третья, шестая и т. д.
Пря гтодаче переменного напряжения на 1рехф.гзпЬ1Й статор на двухфазном роторе сни маетгя сигнал, пропорциональный углу поворота ротора, при этом в составляющей сигнала ротора уничтожаются нечетные высшие гармоники погрешности, т.е. третья, пятая и т.д.
Таким образом, предложенная схема включения и конструкция обмоток позволяет повысить точность выходного сигнала более чем в пять раз.
Формула изобретения
Многофазный индукционный датчик положения типа индуктосин, содержащий tn фазный ротор, п - фазный статор и печатные обмотки, нанесенные на основания - подложки ротора и статора, отличающнс я тем, что, с целью повышения точности, фазные обмотки ротора смещены в пространстве относительно друг друга на величину
Т / in , а фазные обмотки статора смещены в пространстве относительно друг друга на величи.ну сГ / п , где Г - шаг обмотки индукционного датчика; равный двойному полюсному делению.
Источники информации, принятые во внимание при экспертизе :
1.Патент Швейцарии № 494945, кл. G«01 В 7/30, 1969.
2.Бычатин Д. А. , Гольдман И. Я.
кн. Поворотный индуктосин, изд-во Энергия Л. 1969, с. 46-55 (прототип}.
Фиг. 1
Фиг. 2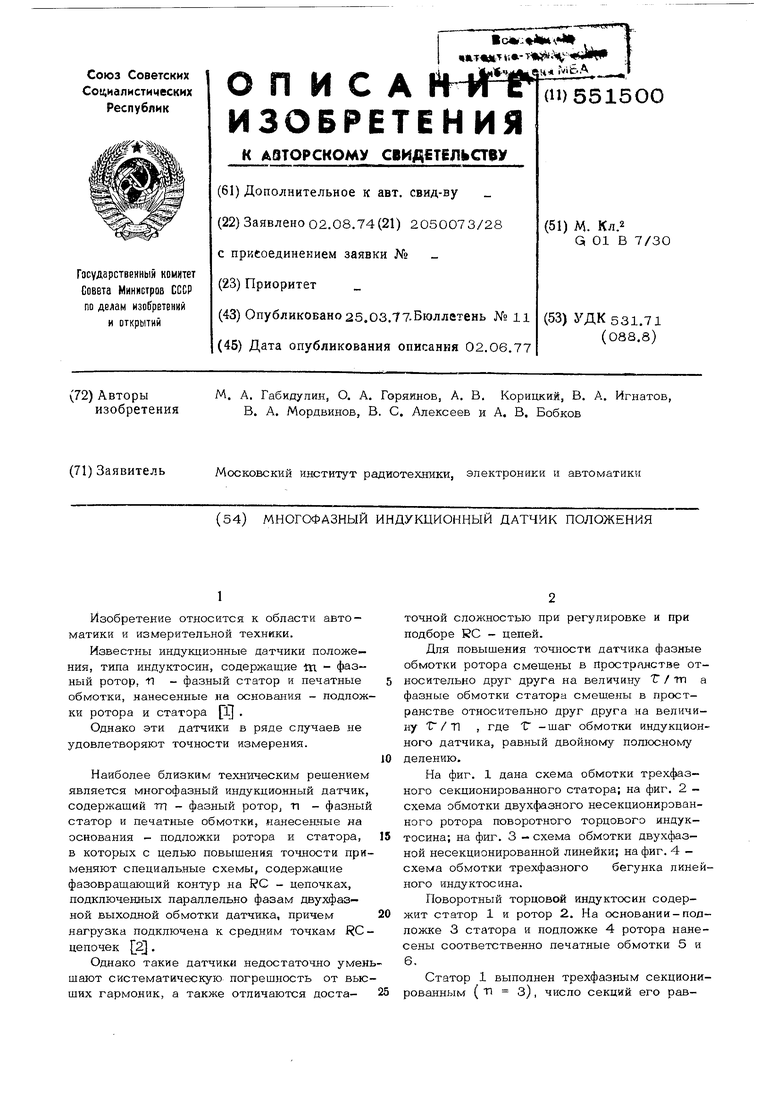
| название | год | авторы | номер документа |
|---|---|---|---|
| Датчик перемещений - индуктокор | 1976 |
|
SU817739A1 |
| Линейный индуктосин | 1975 |
|
SU581483A1 |
| Датчик углового положения | 1979 |
|
SU887921A1 |
| Фазовый датчик линейных перемещений | 2017 |
|
RU2658131C1 |
| Бесконтактный индуктосин | 1977 |
|
SU658672A1 |
| Линейной индуктосин | 1974 |
|
SU516082A1 |
| Датчик положения - многоотсчетныйиНдуКТОКОР | 1977 |
|
SU817892A1 |
| СПОСОБ ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ ВРАЩЕНИЯ ТРЕХФАЗНОЙ МАШИНЫ | 2013 |
|
RU2557071C2 |
| Индукционный датчик перемещений | 1983 |
|
SU1114876A1 |
| Индуктосин | 1983 |
|
SU1136266A1 |
/ .;j
Фиг.З
фигЛ
