Изобретение относится к электро технике и .измерительной технике и может быть использовано в устройствах измерения перемещений поворотных столов станков, измерительных машин и приборов. В современном машиностроении и приборостроении для определения точного угла поворота столов станков, магоин и приборов используются датчики угла поворота вала с печатными обмотками. Известен датчик угла поворота, со держащий дисковые стйтор и ротор с печатными рабочими обмотками, вклкгчающими две синусно-косииусные обмот ки на статоре, и одну иа роторе, выполненными из последовательно соединенных радиапьных проводников, имеющих вид зигзага с равномерным шагом В двух соседних проводниках таких обмоток ток протекает в противополож ных направлениях ij , Недостатком датчика является погрешность, которая возникает при перекосах во взаимном положении обмоток ротора и статора. Обмотки питания могут изготовляться в индуктосиие печатными. Наиболее близким к изобретению по технической сущности и достигаемому результату является индуктосии с рабочими обмоУками, вьтолненными из последова.тельно соединеиных радиальных проводников с шагом 1 рад и обмотками питания, состоявшими из последовательно соединеиных концеитрических печатных проводников с иииимальным наружным и максимальным внутренним радиусами расположения проводников в обмотке R и R, с об- мотками питания и рабочей на роторе включенными параллельно. В этом датчике концентрические проводники соединены последовательно таким образом что ток в соседних проводниках протекает в одном и том же направлении и обмотки питания не имеют вида зигзага периодического или с переменным шагом 2J. Недостатком известного датчика является погрешность, которая возникает при перекосах во взаимном расположении обмоток ротора и статора. Эти перекосы, которые выражаются в радиальном биении обмоток относительно оси вращения ротора и торцовых перекосах обмоток относительно плоскости, перпендикулярной оси 6 вращения, возникает при изготовлениииндуктосина и его установке в корпусе или оборудовании. В том случае, когда присутствуют отдельно либо радиальные, лиОо торцовые перекосы обмоток, погрешности датчика незначительны. Однако, когда торцовые и осевые биения присутствуют одновременно, что всегда имеет место в реальном датчике, погрепшости датчика резко возрастают. Максимальные величины переменной и постоянной составляющих погрешности определяются соответственно .. Vdr 2R, -{e,S,, conet Р - число па.р полюсоп ппдукН тосина ( Р -); Т - шаг периода зигзага обмоток, рад) ; средний радиус обмотки, г мм; f 1 ,г эксцентриситетгеометрического центра обмоток соответственно статора и ротора относительно осн вращения ротора, ь{м; о, ,0 - максимальные перекосы обмоток соответственно статора и ротора относительно плоскостей, проведенных перпендикулярно оси вращения, измеренные на расстоянш RC от оси вращения, мм. Например, в индуктосине с параметрами Р 360; Rgp 60 мм; Е 8) §2 0,02 мм максимэ-пьная переменная составляющая погрешности, вызванная перекосами, составляет 18 угл. с, а полный размах погрешности 16 угл. с. Целью изобретения является уменьшение погрешности, возникающей прк радиальных и торцовых перекосах обмоток ротора и статора. Поставленная цель достигается тем, что в индуктосине,содержащем рабочие обмотки, выполненные из послед овательно соединенных радиальных проводников с шагом Т рад., и состоящие из последовательно соединенных концентрических печатных проводников обмотки питания с минимальным наруж3n
ньгм и максимальным внутренним радиусами RU и Rg, концентрические проводники обмоток питания соединены зигзагами с шагом зигзага Т,
вы2( бранным из условия
,,Рн, (2)
обмотка питания ротора и рабочая об:мотка выполнены секционированными с равным числом секций и каждая секция рабочей обмотки ротора соединена параллельно с диаметрально противо.положно; расположенной секцией обмотки питания ротора.
При этом шаг jKrsara провод1шков обмотки питания может быть равен TjCRg + Кц)/2.
Кроме того, шаг зигзага проводников обмотки питания может быть, переменным, равным Т| « R-, где Rj - радиус расположения концентрического проводника между двумя другими проводниками, смещенными между собой на Т .
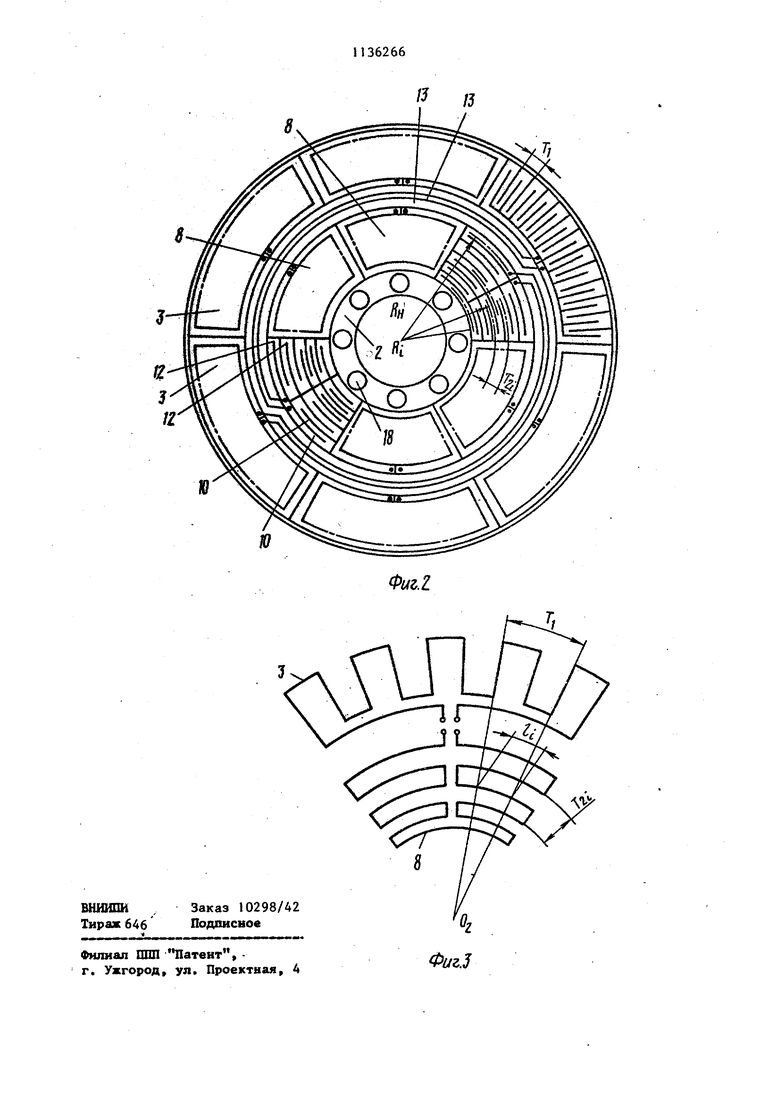
На фиг.1 изображен статор датчика; на фиг.2 - ротор; на фиг.З секции рабочей обмотки и обмотки питания ротора, выполненной с переменным шагом.
- Датчик (фиг.1) содержит статор I и ротор 2. Они выполнены в виде дисков, на торцовых поверхностях котог рык укреплены рабочие печатные обмотки 3 - 5. Рабочая обмотка 3 ротора, расположенная на роторе 2, имеет вид периодического зигзага с шагом Т ра и состоит из одинаковых равномерно расположенных по окружности секций, гальванически не связанных мелоду со бой. Рабочие обмотки 4 и 5 статора состоят из чередующихся собой секций различных обмоток и являются синусно-косинусными (пространстве но смещенными на Т| /4). В пределах каждой рабочей обмотки статора секции соединены между собой с помощью проводного монтажа 6. Обмотки 7 питания статора и обмотка 8 питания ротора состоят из одинакового числа nj(n, 10) концентрических проводников 9 на статоре и проводников 10 на роторе, соединенных между соб.ой радиальными проводниками 1I на статоре и проводниками 12 на роторе таким образом, что обмлтки пита1шя имеют вид зигзага и ток в двух соседних концентрических проводниках
62664
каждой из обмоток питания течет, в противоположных направлениях (по часовой стрелке и против нее. Проводники 9 и 10 в обмотках 7 и 8 питания, имеют одинаковые радиусы R-, Rg и RH - радиусы окружностей первого и п,-го проводников, а Tjj шаг зигзага обмоток 7 и В, выбранный из условия (1). На роторе обмотка 8
Q питания состоит из одинаковых, равномерно расположенных по окружности сеций, гальванически не связанных между собой, число которых равно числу секций рабочей обмотки 3. -В
J каждой паре диаметрально противоположных секций рабочих обмоток 3 и 8 секции включены параллельно с помощью проводного монтажа 13 (на фиг.2 для простоты иллюстрации показано
Q соединение только двух пар секций. , остальные пары секций соединены ана логично 14 16 - выводы обмоток 4, 5 и 7; 17 и 18 - крепежные отверстия статора и ротора).
5 Датчик работает (в фазовом, например, режиме) следующим образом.
Обмотки 4 и 5 статора запитывают синусоидальными токами соответственно
4 -I eosut; 15 -Vinut,
(3)
где 1 - максимальное значение тока; W - круговая састота; ь - время, здесь и далее -обмотки питания именуются просто обмотками) .
Эти токи наводят в секциях обмотки 3 ротора суммарную ЭДС
/м 1 J. м
(f)
- (4.1 аГ 5, dt
;где М4 и My J - взаимные индук гивиости обмоток 4 и 3, 5 и 3 сэответ45 ственно.
Под действием Ej в секциях обмЬтки 8 ротора протекают токи
E,/Z,
(5)
8
где i. - полное суммарное сопротивление цепей, в которые объединены секции обмоток 3 и 8. Ток Зд наводит в обмотке 7 статора
ЭДС, являющуюся выходным сигналом
датчика
s f.
Х6)
5И
где М, - взаимная индуктивность
Обмоток 3 и 8.
Подстановка в последнее выражение (3} и (4) дает
,,,,4.W,,). (7)
В правильно сконструированном датчике при отсутствии перекосов обмоток Myg представляет собой величину постоянную, независящую от угла поворота ротора, а М и Mj при повороте ротора меняются по строго синусоидальным законам
pcf;
М
4Л
. Р(|)(8)
М,
где М - максимальное значение взаимной индуктивности; Р 2 /TI - число пар полюсов
обмотки 3;
- угол поворота ротора. Подставляя (З) и (8) в (7), получаем
,8AmW 54u P().
Таким образом, без учета погрешностей, вносимых перекосами, фаза выходного сигнала линейно изменяется при изменении (о . Измеряя фазу полученного сигнала (9), определяют величину угла поворота ротора.
Если же в предложенном индуктосине имеются перекосы обмоток, то взаимные индуктивности И4,д и Мд не строго синусоидальны, что привог дит к погрешности измерения.
Дня данного индуктосина максимальные величины постоянной и переменной погрешностей определяются соответственно
Ьр
г:(е,8,.бА),
«ср
fep
1ГТг (),
t
где N - число секций обмотки 3 (четное число). . При выводе формул (JO) предпола галось, что количество секций обмоток ротора четное, а количество секций каждой из синусно-косинусных обмоток статора в 2h раз (n-j 1,
62666
2 ...) больше N , т.е. равно 2n-N. Соотношения (10) сохраняются при любом четном числе секций синуснокосинусных обмоток статора и любом 5 четном или нечетном числе М V 2 секций обмоток ротора.
Также предполагалось, что шаг Т зигзага обмоток питания выполнен постоянным, равным Т. (Ка+Кц)/2.
0 Как показывают расчеты, лучшую компенсацию погрешности перекосов и эксцентриситета имеют датчики с переменным тагом Тл, равным , где RJ - радиус окружности проводника,
5 расположенного внутри зигзага. На фиг.З показана конструкция питающих обмоток с таким шагом, В этом случае любой из шагов равен длине дуги 1 , отсекаемой от проводника,
0 расположенного внутри рассматриваемого шага, двумя прямыми, проведенными под углом Т из геометрического центра Ол обмоток.
Сравнение (1) и (10) показьшает,
5 что.погрешность предложенного датчика, вызываемая перекосами и эксцентриситетом, как постоянная, так и переменная приблизительно в 0,32 N раза меньше, чем погрешность известQ ного устройства. Увеличивая .число N секций, на которые делятся обмотки ротора, эту погрешность можно снизить до любой заданной величины. Так, в датчике, имекнцем те же параметры, что и в приведенном примере (р 360, MH,€,f 2 1 2 0,02 мм) при
А Р««х CPmax iO. Угл. с,
var const 0 то есть погрешность уменьшилась в
20 раз по сравнению с известным устройством.
Путем увеличения числа Я секций, на которые разделены обмотки ротора,
5 величина погрешности перекосов может быть уменьшена до любой заданной величины.
Другим преимуществом датчика является упрощение его изготовления и
0 применения, так как он допускает значительно большие эксцентриситет и перекосы обмоток относительно базовых поверхностей как при изготовлении обмоток, так и при установке
5 статора и ротора в оборудовании или корпусе датчика.
| название | год | авторы | номер документа |
|---|---|---|---|
| Датчик перемещений | 1978 |
|
SU817893A1 |
| Датчик перемещений - индуктокор | 1976 |
|
SU817739A1 |
| Датчик перемещения - "индуктокор | 1978 |
|
SU817894A1 |
| Датчик положения - многоотсчетныйиНдуКТОКОР | 1977 |
|
SU817892A1 |
| Бесконтактный индуктосин | 1977 |
|
SU658672A1 |
| Преобразователь угла поворота вала в код | 1984 |
|
SU1179537A1 |
| Многофазный индукционный датчик положения | 1974 |
|
SU551500A1 |
| Синусно-косинусный датчик угла | 1976 |
|
SU652658A1 |
| Устройство для двухканальной дистанционнойпЕРЕдАчи углА | 1979 |
|
SU851672A1 |
| Индуктосин | 1976 |
|
SU610256A1 |

1.ИНДУКТОСИН, содержащий ротор и статор в ввде дисков с рабочими- обмотками, выполненными в виде последовательно соединенных радиальных проводников, установленных с шагом Т рад,, и обмотками питания из последовательно соединенных концентрических печатных проводников, распо ложенных с радиусом установки наруягного проводника Ец и внутреннего проводника Rg, отличающийс я тем, что, с уелью уменьшения погрешности, концентрические проводники обмоток питания соединены зигзагами с шагом зигзага Т,; , опреденяе в4м выражением i , обмотка питания ротора и рабочая обмотка выполнены секционированными с равным числом секций и каждая секция рабочей обмотки ротора соединена параллельно с диаметрально противоположно расположенной секцией обмотки питания ротора. 2. Ьдуктоснн по п. I, о т л и чающийся тем, .что шаг зигзага проводников обмотки питания равен Т(Нр+Нц)/2. 3.Индуктосин по п. I, о т л и чающийс я тем. что шаг зигзага проводников обмотки питания переменный и равен , где RJ - радиус расположения концентрического проводника между двумя другими проводниками, смещенными между собой иа Т, .I
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| СИСТЕМА МОНИТОРИНГА СОСТОЯНИЯ И РАБОТОСПОСОБНОСТИ ПОЛЬЗОВАТЕЛЯ ЭКЗОСКЕЛЕТА | 2022 |
|
RU2799835C1 |
| 336-123, | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Бесконтактный индуктосин | 1977 |
|
SU658672A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
