1
Изобретение относится к автоматике и вычислительной технике и может быть использовано в системах автоматического измерения линейных перемещений и положений, в частности в станках с числовым программным управлением.
Известны измерительные преобразователи линейных перемещений (линейные индуктоснны) 1|, содержащие неподвижную часть-- линейку и подвижную - бегунок, на которых расположены двухфазные обмотки. При этом обмотку бегунка выполняют секцнонированной, а секторы, принадлежащие различным фазам, чередуются. Такое выполнение конструкции линейного индуктоснна делает его обмотки чувствительными к неплоскости линейки, что снижает точность устройства.
Известен линейный индуктосин (2, содержащий линейку, на которой расположены несдвинутые по пространственному шагу плоские несекционированные двухфазные обмоткн, бегунок, на котором расположены с угловым скосом по отношению к проводникам обмоток линейки, многослойные секционированные двухфазные обмотки. В частности двухфазная и секционированная в каждом слое обмотка бегунка выполнена двухслойной с транспозицией каждой фазы из слоятв слой. Такое строенне обмоткн позволяет уменьшить чувствительность датчика к случайным погрешностям расположения проводников обмотки линейки и неплоскости токопроводящих слоев бегунка. Однако нз-эа конечной толщины слоев и изоляционных прослоек между слоями эффект снижения погрешности от не плоскостности и неточности выполнения относительно невысок и требования к неплоскостности и погрешностям линейки остаются достаточно жесткими.
Цель изобретения - повышение точнгк-ти индуктосина.
Это достигается тем, что крайние слои обмоток бегунка включены в одну фазу, а средние в другую; причем слон каждой из фаз вымолие ны идентично и расположены друг над другом.
На фиг. 1 представлена схема конструкции линейного индуктосина; на фиг. 2 схематично показано расположение слоев для двухфазной четырехслойной обмотки бегунка и схема соединений секций и слоев между собой.
Линейный индуктоснн (см. фиг. I) содержит неподвнжнуЮ линейку I, на которой расположены не сдвинутые по пространственному шагу с плоские несекционированные двухфазные обмотки, выполненные в виде -плоских провод НИКОВ, соединенных между собой в лобових
частях перемычками. На бегунке 2, соединенном с подвижной частью контролируемого объекта (на чертеже не показан), расположены с угловым скосом а по отношению к проводникам обмоток линейки многослойные (на фиг. 1 показан один слой) секционированные двухфазные обмоткн, состоящие из проводников, аналогичных линейке. Сдвиг каждой фазы относительно другой соответствует г/4 или 90 электрических градусов.
Секции внутри каждой фазы, смещенные на t/2, внутри слоя соединены между собой последовательно - встречно для компенсации паразитных ЭДС индуктируемых в лобовых частях обмоток (см. фиг. 2) .Однако все секции имеют одинаковые пространственные фазы по отношению к обмоткам линейки и принадлежат одной фазе. Число проводников в каждой секции должно быть нечетным, а число секций в каждом слое четным.
Обмотка бегунка выполняется четырехслойной, причем первый и четвертый сл«М1 не имеют взаимного пространственного сдвига, соединены последовательно и образуют первую фазу: второй и третий слои также не имеют взаимного пространственного сдвига, но сдвинуты по отношению к первому и четвертому слоям на 90 электрических градусов, соединены последовательно и образуют вторую фазу.
Линейный индуктосин работает следующим образом.
На двухфазную обмотку бегунка 2 подается двухфазное напряжение возбуждения; двухфазная обмотка линейки I подключается к фильтру обратной йоследовательности (на чертеже не показан).
При этом в обмотках бегунка 2 протекают токи, условно показанные на чертеже фиг. 2 стрелками для одного направления тока возбуждения.
Эти токн вызывают появление ЭДС ной индукции в проводннках линейки 1, фаза этих ЭДС определяется положением проводников бегунка 2.
С выхода фильтра обратной последовательности снимается сигнал, фаза которого пропорциональна линейному перемещению бегунка 2 относительно линейки 1.
Благодаря тому, что обмотки бегунка 2 имеют скос о, расположенные без сдвига обмотки линейки 1 образуют по отношению к каждой из обмоток бегунка двухфазную систему. Помимо упрощения конструкции, скос обеспечивает более высокую синусоидальность кривых взаимоиндукции между обмотками бегунка и линейки.
В предлагаемой конструкции средние значения зазора между линейкой и бегунком для каждой фазы равны, неплоскостность линейки практически не влияет на точность преобразования линейного положения в электрический сигнал. Разнотолщинность слоев обмоток бегунка, изоляционных промежутков и неточность расположения слоев друг относительно друга приводит к малой несимметрии двухфазной системы бегунка, которая компенсируется фильтром обратной последовательности, поэтому нет необходимости налагать жесткие требования на точность взаимного расположения обмоток бегунка.
Формула изобретения
Линейный индуктосин, содержащий линейку, на которой расположены плоские двухфазные обмотки, бегунок, с размещенными на нем многослойными секционированными двухфазными обмотками, расположенными с угловым смещением по отношению к проводникам обмоток линейки, отличающийся тем, что, с целью повышения точности индуктосина, крайниеслои обмоток бегунка включены в одну фазу, а средние - в другую, а группы слоев каждой из фаз выполнены идентично и расположены друг над другом.
Источники информации, принятые во внимание при экспертизе: : „ „
1. Авторское свидетельство СССР № 392539 кл. G 08 С 9/04, 05. 03. 71.
2. Патент США № 3441.888, кл. 336-123, 29. 04. 69. 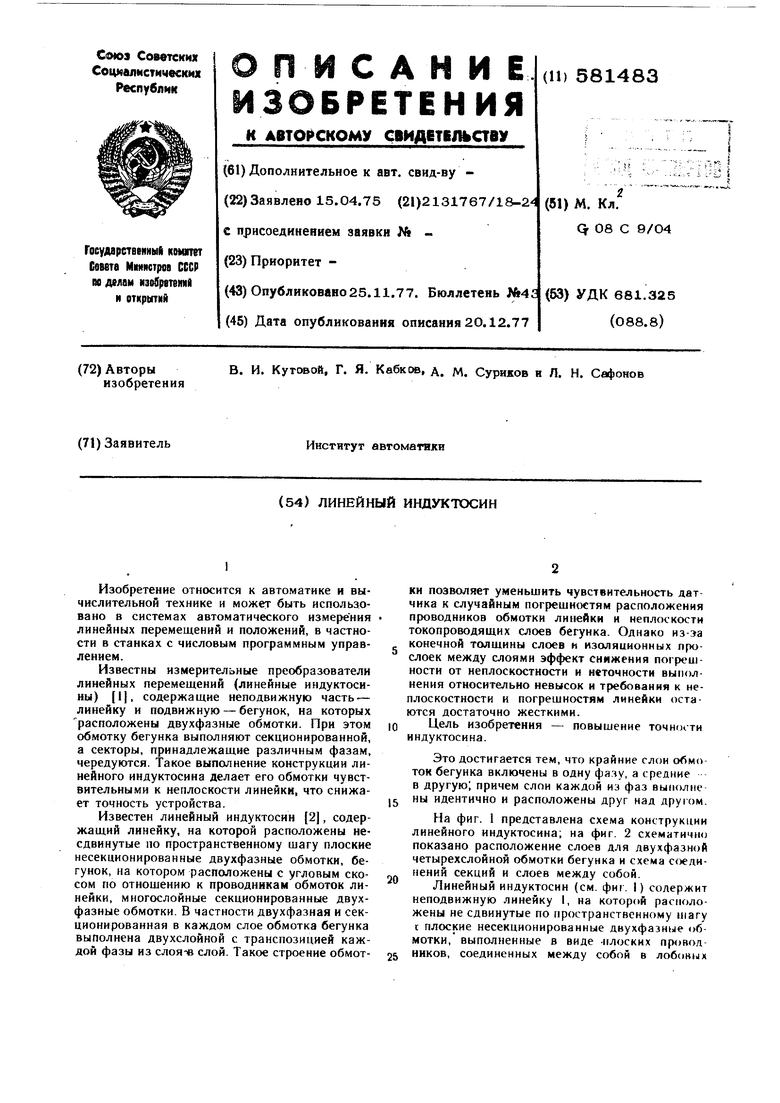
| название | год | авторы | номер документа |
|---|---|---|---|
| Линейный индуктосин | 1978 |
|
SU830118A1 |
| Многофазный индукционный датчик положения | 1974 |
|
SU551500A1 |
| Датчик перемещений - индуктокор | 1976 |
|
SU817739A1 |
| Индуктосин | 1976 |
|
SU610256A1 |
| Индукционный датчик перемещений | 1983 |
|
SU1114876A1 |
| Индуктосин | 1974 |
|
SU606192A1 |
| Бесконтактный индуктосин | 1977 |
|
SU658672A1 |
| Многоотсчетный датчик положенияи СпОСОб изМЕРЕНия пОлОжЕНия СпОМОщью дАТчиКА | 1976 |
|
SU817738A1 |
| Индуктосин | 1987 |
|
SU1429240A2 |
| Линейный индуктосин | 1973 |
|
SU462197A1 |

Фие.1
f/
I i I 1 I I 1 f т I I I 1 i t j
igc S v se:
1 Jt pa - I
л ll
i/Л/
